SolidWorks在工业机器人基础教学中的应用
2017-11-20郭付龙
郭付龙
(深圳技师学院 中德智造学院,广东 深圳 518116)
SolidWorks在工业机器人基础教学中的应用
郭付龙
(深圳技师学院 中德智造学院,广东 深圳 518116)
工业机器人基础是技工院校工业机器人应用与维护专业的一门重要的专业基础课,针对工业机器人基础教学中的机械基础知识,将SolidWorks软件引入到工业机器人基础的教学中来,通过软件强大的草图绘制、建模以及仿真功能将复杂的问题直观化,降低了教学和学习的难度.
SolidWorks;工业机器人;草图绘制;运动仿真
工业机器人基础课程是技工院校工业机器人应用与维护专业的重要专业基础课,其任务是让学生认识工业机器人的基本结构、控制及驱动系统,为以后工业机器人专业课程的学习奠定基础[1].鉴于技工院校的学生底子薄、学习能力差,其中牵涉到机械基础的很多知识过于理论化,学生难以理解和掌握.笔者通过教学实践将三维CAD软件应用到工业机器人基础的教学实践中去,形成新的多媒体教学,表达一般教学手段难以解释有关专业的内容,将抽象的概念形象化、具体化,使课堂教学生动直观,易于接受和理解.实践证明,通过基于SolidWorks的工业机器人基础教学方法的尝试,对于增强学生对理论知识的理解及工程概念的掌握有很大的促进作用.
1 SolidWorks软件在教学中的实例
1.1 工业机器人的机构运动简图
工业机器人的机构运动简图是指用线条与运动符号表示机器人臂部、腕部等结构及结构间运动形式的简易图形.机器人机构运动简图能够很好地分析和记录机器人的运动,有利于对机器人的设计方案进行鲜明的对比[2].机器人的运动简图包含构件、运动副及自由度的概念.传统形式的白板及PPT教学模式难以展示机器人实物与运动简图之间的关系,难以解释运动简图所包含的机构、运动副及自由度之间的关系,学生被动接受,教学效果一般.
利用SolidWorks强大的草图绘制功能,用国标规定的线条和符号,按照一定的比例尺绘制出机器人的运动简图.图1(a)为某SCARA机器人的实物,图1(b)为使用SoildWorks绘制的该机器人的运动简图.绘制完成之后利用SolidWorks软件的草图块功能将组成机器人的每一个构件转换成块,该草图可以模拟机器人机构的运动.将传统教学中固定的机构运动简图通过SolidWorks软件转换成运动的图形,能够清楚地解释构件的概念,展示构件之间的运动关系,描述机器人的自由度,让机构运动简图真正运动起来,吸引学生的注意力,提升教学效果.

图1 SCARA机器人机构运动简图
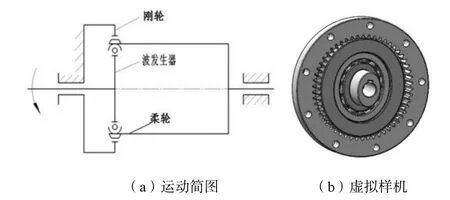
图2 谐波减速器的工作原理
1.2 谐波减速器的工作原理
在工业机器人中,减速器是连接机器人动力源和执行机构的中间装置,谐波减速器广泛应用在工业机器人中.谐波减速器是利用行星齿轮传动原理发展起来的一种新型减速器,是依靠柔性零件产生弹性机械波来传递动力和运动的一种行星齿轮传动[3],它由固定的内齿刚轮、柔轮和使柔轮发生径向变形的波发生器3个基本构件组成.在教学过程中,学生缺乏机械原理的知识,对谐波减速器的原理难以理解.
根据图2(a)所示的减速器的运动简图,利用SolidWorks创建该减速器的虚拟样机.考虑到创建虚拟样机的目的只是进行运动仿真,而不是进行具体的结构设计,因此在建立虚拟样机时,只需满足机构的尺寸及运动副要求即可.建模装配好的虚拟样机如图2(b)所示.
利用Motion插件对建立好的减速器的虚拟样机进行运动仿真,不仅可以直观地显示该减速器的运动过程,让学生很容易理解减速器的工作原理,还可以将整个运动过程记录下来存为avi格式,供制作多媒体课件使用,增加课堂的趣味性.通过逼真的减速器的运动仿真,学生对复杂的减速器的工作原理一目了然,提高了学生学习的积极性.
2 结论
实践证明,将SolidWorks软件引入工业机器人基础课程的教学中可取得良好的教学效果.应用SolidWorks软件对该课程中所涉及的机械基础知识利用其强大的草图绘制、建模以及运动仿真功能展示出来,让学生更容易理解,为该课程的教学提供了有益尝试.
[1]王保军,滕少锋.工业机器人基础[M].武汉:华中科技大学出版社,2016.
[2]郝巧梅,刘怀兰.工业机器人技术[M].北京:电子工业出版社,2016.
[3]汤晓华,蒋正炎,陈永平.工业机器人应用技术[M].北京:高等教育出版社,2015.
郭付龙(1987-),男,硕士,主要研究方向为CAD/CAM及工业机器人的开发与应用.
〔编辑:刘晓芳〕
TH111;TP391.72
A
10.15913/j.cnki.kjycx.2017.22.154
2095-6835(2017)22-0154-02