2016年玛莎拉蒂Levante新技术剖析(七)
2017-11-18王钟原
王钟原
2016年玛莎拉蒂Levante新技术剖析(七)
王钟原
(2)压缩机组
压缩机组连接在阀组与储气罐之间,其中含有以下部件:
◆1个单缸往复式压缩机,通过RDU中的继电器供电
◆2个换向阀,通过专用3引脚插头进行控制。这些滑阀可以让压缩机以任意方向装入到阀组与储气罐之间,甚至可以完全绕过压缩机,直接与阀组和储气罐相连
◆1个干燥器元件,用于除去系统中所含空气的水分
◆1个机械释压阀
◆3组橡胶衬套,压缩机通过它们安装到后副车架的支架上
压缩机组为免维护与维修的密封组件。压缩机一般不能用于连续操作,在反复改变驾驶高度后,可能会将其暂时停用,以防温度过高。
在需要操作任何电磁阀时,ASCM会通过受限制的工作回路为其供电,以限制电流进而防止温度过高。请勿将任何阀连接到12V直流电源上进行测试。
(3)储气罐
系统储气罐由两组7L汽缸组成,它们用作补偿空气弹簧中所含空气变量的缓冲装置。汽缸横装于后部副车架上,一个在压缩机与阀组前部,另一个位于其后部。空气接头位于汽缸右端。
(4)驾驶高度传感器
为了正确控制整个空气悬架系统,每个车轮均配有专用的驾驶高度传感器,并直接与ASCM相连。每个传感器均与其中一个悬臂相连(如图65所示),使用霍耳传感器通过专用内部回路将位置转换为PWM信号。与M156-7车型一样,这些信号同样用于自适应大灯系统(如果配备),以自动调节大灯高度,但它们连接至ASCM,而不是AFLS模块。

图65 驾驶高度传感器位置

图66 空气质量调节
(5)空气悬架控制模块(ASCM)
ASCM位于行李舱右侧饰板后方。该模块控制空气悬架系统的所有部件,包括那些属于Skyhook连续可变阻尼控制系统的部件(加速计与阻尼器控制阀)。因此,ASCM包含之前ADCM的所有功能。 ASCM连接到CAN-C总线。
4.系统操作
系统为封闭型,例如,空气仅在弹簧与储气罐之间移动。压缩机可吸入外部空气,但通常只有为了补偿少量空气泄漏时才会这样做。因此,系统正常操作过程中,不会从大气中吸入或向其中排放大量空气。注意,几乎所有空气管路都是双向的,外部管路(吸气、排气以及充气管路)除外。
(1)驾驶高度调节
在需要对任何弹簧进行高度调节时,ASCM会向阀组发送以下命令:
◆如果弹簧与储气罐之间的压差指示需要提升空气流量(即,弹簧需要充气时内部压力较低或弹簧需要放气时内部压力较高),ASCM便会将压缩机中的换向阀设置为直接与弹簧和储气罐相连
◆如果压差与所需气流方向相反,则转向阀将进行操作,以确保按正确的方向在弹簧与储气罐之间连接压缩机。随后,ASCM会激活压缩机根据压差推动空气
在这两种情况中,ASCM均会通过闭环控制,保持空气流量,直至每个驾驶高度传感器都指示已达到所需驾驶高度。最多可同时对两个弹簧充气或放气。
(2)空气质量
为了能够正确操作,封闭系统的部件内需要具有一定量的空气。此参数被称为“空气质量”,并且以巴/升为单位进行测量。空气弹簧内部的压力仅与其伸展度(即,行驶高度,由ASCM主动控制),以及所支撑的重量有关。因此,改变系统中所含空气质量,将会按比例改变储气罐汽缸中的压力:
◆空气质量过高将导致储气罐压力过高,在需要将空气从弹簧传送至储气罐时,会对压缩机施加应力
◆相反,空气质量不足将导致储气罐压力过低,在弹簧需要增大压力(满负载车辆,提高驾驶高度)时,会提高压缩机的工作量
ASCM会通过一种兼顾弹簧压力与伸展度、储气罐压力与温度的算法定期估算空气质量。如果空气质量超出指定范围,ASCM会从外部抽入空气或从储气罐排出空气进行补偿。其工作原理图如图66所示。
(3)高度调节逻辑
ASCM会持续监控驾驶高度传感器,并在车身的任何一角过度偏离目标位置时,执行所需调节。如果需要改变总体驾驶高度,则ASCM会执行所谓的“骆驼形”移动,此时车辆将分别而不是同时升高或降低前后轴,来循序通过所有中间驾驶高度设置。这样便可限制车身倾斜并始终保持车头下沉的方向,以在未装备自适应大灯时防止前大灯过度抬起。因此,升起车身时,会先升起后轴,而降低期间,则会先降低前轴。
(4)驾驶高度与行驶速度
空气悬架系统提供五种不同驾驶高度用于行车,外加一种额外高度(降至最低)以便于上下车。
越野2(+40mm)为最高高度设置,在涉水时或在高艰越野道路上使用。出于稳定性考虑,只能在车速低于40km/h时使用此高度。
越野1(+25mm)为与越野驾驶模式相关的默认高度。在车速超过90km/h时驾驶高度与驾驶模式会自动返回正常模式。
正常(参考高度)为适用于所有其他驾驶模式的默认高度。
运动1(-20mm)降低驾驶高度以增强其空气动力学性能,可在车速超过130km/h时自动启用,也可手动启用。
运动2(-35mm)是唯一不能由驾驶员选择的驾驶高度,在车速超过185km/h时将自动启用。
驻车(-45mm)为最低高度设置,同时也是方便上/下车策略的一部分。该模式可在速度低于24km/h时启用,同时也可在挂入P挡时自动启用(可通过MTC+进行设置)。
在车速超过上述阈值时,将立即触发驾驶高度自动转换(如图67所示垂直箭头),或者在车速非常接近阈值时,延迟数秒转换(阴影区域)。这种控制也会有些许滞后,也就是说,阈值会因升速还是降速而有所不同。

图67 驾驶高度转换区间
(5)驾驶高度选择:ASBM2
驾驶员可通过标有ASBM2(附件开关组模块2)的中控台上的摇臂开关选择所需的驾驶高度(在当前车速允许的范围内进行选择),该模块负责执行驾驶模式按钮面板(ASBM1)的功能,如图68所示。开关通过LIN连接到BCM,其中含有5个LED灯,用于显示当前所选高度(常亮),或是将达到的目标高度(闪烁)。为保护车辆以及乘员,只能在所有车门、尾门都关闭时改变驾驶高度。

图68 驾驶高度选择
(6)驾驶高度与驾驶模式
大部分驾驶高度都适用于所有驾驶模式,仅越野模式与相关高度例外,如表22所示。

表22 驾驶高度与驾驶模式
请注意,运动2驾驶高度仅在高速行驶时自动启用。如果通过ASBM2手动选择驾驶高度时,运动2将被直接跳过(系统直接在运动1与驻车之间切换)。如果驾驶高度设置不适用于当前所选驾驶模式,则将自动改变驾驶模式,以适应驾驶员请求的驾驶高度(例如,从“越野1”切换到“正常”,反之亦然)。
(7)点火开关打开与关闭时的操作
点火开关打开时,车辆将重置为“正常”驾驶模式与驾驶高度。但需要注意的是,如果车辆保持在“越野模式”,在打开点火开关后,车辆高度不会下降,以防车辆停在极不规则地形上时,因降低车身而损坏底板与车底部件。也是出于同样的原因,越野模式是唯一不能适用“驻车”高度的驾驶模式。
5.维修操作
(1)车辆举升与顶起
在使用起重机举升车辆或顶起车辆来更换车轮时,最好通过“MTC+”设置菜单中指定的选项禁用自平衡系统。这样,系统才不会干扰维修作业。
(2)弹簧更换
通过特定的主动诊断命令,可有选择性地对单个弹簧进行释压,以便安全地断开空气管路连接,这样便无须完全排空系统即可更换弹簧。在此操作期间,将由储气罐储存来自弹簧的压缩空气。通过特定的主动诊断命令可根据需要利用储气罐中空气以及系统压缩机来为弹簧充气,而无须利用外部空气对系统进行重新充气。按照此方法最多可同时为两个弹簧释压。
(3)系统排空
对于任何比更换单个或两个弹簧更复杂的维修操作(例如,拆下或更换阀组或压缩机组),都需要对系统完全释压。通过特定的主动诊断命令可打开排气阀并排除系统中的空气来将系统排空。进行此操作后,便可断开并拆下系统部件。注意,仅应在起重机举起车辆且四轮离地的情况下,执行此程序。空气悬架系统为常火线供电,即使点火开关关闭也可执行驾驶高度调节。请勿在空气悬架系统已释压的情况下驾驶车辆。这将导致空气弹簧以及其他悬架部件严重损坏。
(4)系统充气
充气阀(如图69中1所示),位于右后轮拱前侧。同时可看见带过滤器(如图69中2所示)的外部吸气软管,以及排气软管(如图69中3所示)。

图69 充气管路位置
压缩机旨在用于与驾驶高度改变相关的不定时操作和补偿空气泄漏。不建议使用压缩机完全利用外部空气来对空气系统进行充气,理由如下:
◆耗时过长,因为压缩机会出于热保护而不断在启动与关闭之间切换
◆会缩短压缩机的使用寿命
◆可能损坏干燥器元件,该元件为压缩机的一部分,而且不能单独更换
◆对外侧空气过滤器形成过度压力
鉴于这些原因,在完成需要将系统完全排空的维修操作后,建议手动对其充入外部空气。必须将外部汽缸或压缩机连接到充气阀,必须使用压力调节器以确保储气罐充气压力不会超过1400kPa。为避免损坏系统,气体必须符合以下规格,如表23所示。

表23 气体规格
在对空气悬架系统进行任何维修操作之后,请勿驾驶车辆,直到IPC显示屏确认已达到“正常”的驾驶高度为止。在弹簧未充气的情况下驾驶车辆将会对它们造成严重损坏。使用空气悬架重新加注配接组件(p/n900000473)以将来自外部的空气或无氧氮气连通到空气悬架重新加注阀处。
(七)阻尼系统
ASBM1上的后部主动阻尼器与硬阻尼器选择按钮,现在与“运动”驾驶模式相结合,如图70所示。 Skyhook主动阻尼系统作为所有Levante系列车型的标配。这些主动阻尼器由ZF-Sachs生产,与M156-7车型所采用的阻尼器相似,每个阻尼器内都包含电控电磁阀,作为CDC系统(连续可变阻尼控制)的执行核心使用。唯一的相关区别在于前部阻尼器,该阻尼器集成在空气弹簧中,并且不可单独更换。

图70 按键位置
但是,系统的电子管理方面却存在几处区别:
系统的控制。之前由专用电子模块(ADCM)管理,现在则属于空气悬架系统控制模块(ASCM)的一部分,该模块将ZF-Sachs软件集成在Continental提供的硬件中。
不能再孤立地考虑“硬阻尼器”驾驶设置和驾驶模式。只有在选择“运动”模式的前提下才能选择“硬阻尼器”驾驶设置。
驾驶高度传感器经过重新设计,同时作为Skyhok系统的输入使用。因此,在之前设置的基础上,新增了两种输入信号(后轮动作),同时升级了软件以利用它们的优势。
鉴于此,无须再在前轮座上安装的两个竖直加速传感器,因而已将它们移除。
另一方面,仍然保留了底盘上安装的竖直加速计,并且其位置与M156-7车型上的安装位置相同。保留了3个车身加速传感器,分别位于两侧前悬架上部,以及后右侧悬架上部,如图71所示。

图71 加速传感器位置
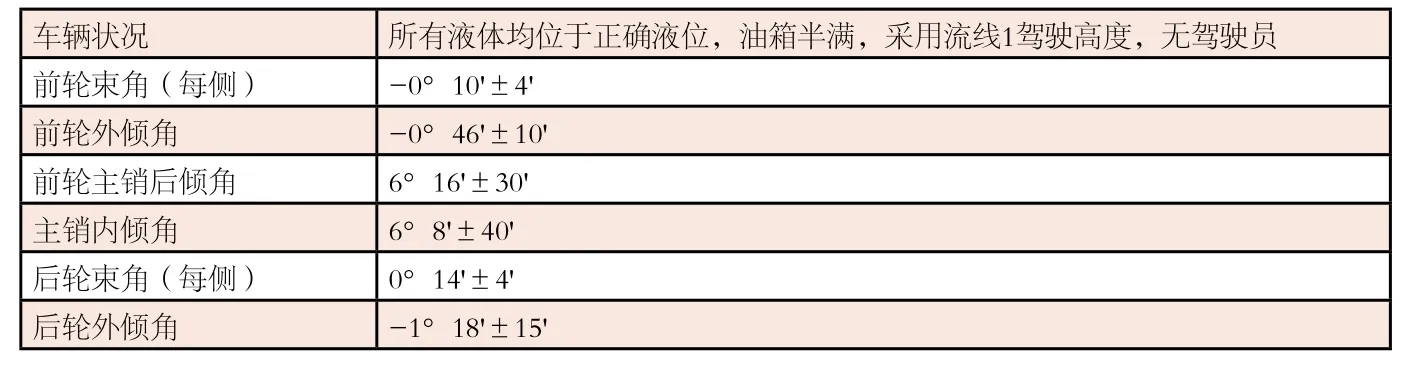
表24 悬架几何参数
(八)车轮几何与定位
可调整以下与车辆车轮几何相关的参数:
◆前轮束角:通过松开横向转向杆固定螺钉,然后转动横向转向杆进行调整
◆前轮外倾角:通过旋动底盘侧下部悬架杆的两个偏心螺栓进行调整
◆前轮主销后倾角:通过旋动底盘侧下部悬架杆的两个偏心螺栓进行调整
◆后轮束角:通过松开底盘侧后轮距控制杆的螺栓,然后调整调节螺钉进行调整
◆后轮外倾角:通过旋动底盘侧上部悬架连接件的两个偏心螺栓进行调整
需要一对特殊工具来调整后轮外倾角:用于调节的特定扳手(p/n900028638),以及用于拧紧悬架杆螺栓的转接工具(p/n900000472)。
表25列出了Levante悬架四轮定位值,可能会有变动。
(待续)
