空地协同实时搜索系统
2017-11-17宁夏大学朱小波王中意
宁夏大学 朱小波 王中意 车 进
空地协同实时搜索系统
宁夏大学 朱小波 王中意 车 进
采用无人机与地面机器人协同搜索可以在未知条件下进行物体搜索,本设计采用无人机室内自动导航,并记录空间位置信息,再搜寻到物体时返回将空间位置信息传递给地面机器人,然后协同地面机器人进行搜寻,在抓取后沿最优路径返回.
协同搜索;自动导航;最优路径;位置信息
0 引言
随着现代科技的发展,空间机器人与地面机器人协同工作变得越来越重要.地面机器人由于其所处空间比较有限,因此对全局的环境感知能力较弱,尤其是在城市灾害救援等完全未知的应用环境中局限比较大[1].比较有效的解决办法是采用空地机器人协作,无人机和地面机器人所具有的功能互补性使二者间的协作执行效率明显的提升[1-2].利用无人机构建全局环境模型,为地面机器人提供导航信息,从而提高任务使命的完成度.通过空地机器人协作平台的搭建,进行路径规划、无人机与地面机器人之间的通信;进而到达目的地点并抓取目标,沿最优路径返回.
1 空地机器人协同整体设计
本系统中地面机器人采用NAO人形机器人,空中采用四旋翼机器人,实验场景为室内搭建的迷宫.迷宫的模型为每个小方格为60cm*60cm,总共16个小方格,竖直墙壁高度为60cm.这样可以使NAO机器人能够自由地在迷宫里行走、转弯,同时避免了外界的干扰.整个系统主的功能实现为:首先无人机起飞在迷宫中寻找需要搜索的物体同时记录下搜寻过的空间位置,在找到物体后标记物体所在位置信息;无人机返回并悬停在NAO机器人的上部,同时NAO启动准备出发,此时无人机与NAO同步行走,当遇到拐弯处或者NAO机器人走偏时.无人机可以给予正确的引导.当NAO达搜寻点时,NAO开始抓取,抓取后沿最有路径返回.系统总体框图如图1所示.
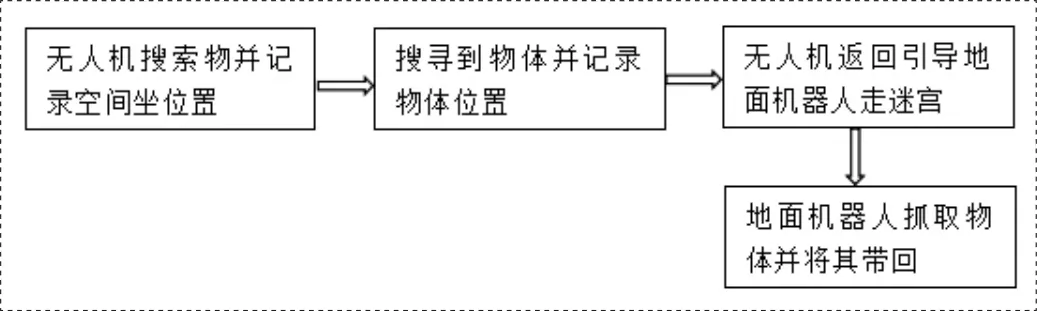
图1 系统总体框图
2 无人机室内定位
2.1 定位算法
由于室内环境复杂且没有GPS信号,因此四旋翼无人机飞行和搜寻目标物体比较困难.
因此本文研究了适用于室内环境的基于激光雷达的三维定位技术.在激光雷达为二维定位基础上,结合惯性导航单元,实现室内的三维定位.寻求当前扫描数据集合{(rc1,ξc1),(rc2,ξc2)...(rci,ξci)...}与参考扫描数据集合{(rr1,ξr1),(rr2,ξr2)...(rri,ξri)...}之间的最佳匹配关系是利用激光雷达进行相对位姿估计的本质[1-3].本文选用了一种基于角度对应关系的位姿估计算法,算法利用了激光雷达扫描数据的特点,据参考扫描中依次排列的角度信息寻找与当前扫描数据点的对应关系,计算出当前扫描到参考扫描的相对位姿信息.

图2 坐标示意图
2.2 三维环境下无人机定位

因为无人机坐标系(3)到虚拟坐标系(2)下的变换需要先经过x在经过y两个方向轴,所以可以得无人机坐标系(3)到虚拟坐标系(2)下的转换矩阵为:

笛卡尔坐标为:

经变换后可得坐标为:

无人机在迷宫上方搜索的过程中记录下飞行轨迹,当搜寻到物体时记录下被搜寻物体的位置,返回将其数据发送至NAO机器人.
3 空地协同搜索
对于无人机与NAO机器人协同搜索采用波门跟踪算法.波门算法一般分为三种情况:(1)没有要求的目标时,在等待模式;(2)当目标出现时,并且目标出现在波门内,此时在跟踪模式;(3)目标从波门消失时,波门会进行全局搜索.NAO在运动过程中,在短暂的时间它的运动轨迹遵循某一确定函数关系.设NAO机器人在前a帧图像中的中心位置坐标为(xk,yk),K的取值范围为(0,1,2,3...a).NAO运动的x坐标推导与y坐标推导类似,所以本文仅推导x坐标[2-5].
假设x的最符合要求的二次函数可以用下式表示:

通过前面a各xk,可以得到这a个点的误差方差:

使用最小二乘法来让误差平方达到最小化,可得:
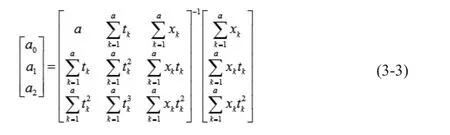
将(3-3)式带入(3-1)便可以算出下一帧中NAO位于图片的中的位置.
4 NAO抓取抓取及沿最优路径返回
4.1 抓取设计
目标物的识别与抓取主要分为以下三个步骤:
第一步:对Nao机器人两个摄像头所获得图像进行检测.在当前Nao机器人的姿态和位置,如果两个摄像头的图像中都没有检测到小棒,那么通过调整Nao机器人向前走一定距离,然后重新检测图像中是否存在目标物体.当检测到小棒存在,则调整机器人位置姿态,使机器人躯干面对小棒.重复进行上述检测,该过程至多循环四次即可检测Nao机器人周围是否有小棒出现.第二步:调整Nao机器人自身角度,使小棒处在Nao机器人正对面位置,接着对小棒重新进行检测,如果小棒出现在顶部摄像头,那么Nao机器人则向前行走至底部摄像头可以检测到小棒为止.如果小棒已经出现在底部摄像头视野内则可直接进入下一步.第三步:底部摄像头检测到小棒之后,通过多次调整角度,小棒处于底部摄像头的视野中央.接下来通过一系列的机器人的位置、角度调整以及检测,使小棒位于底部摄像头视野中的特定位置.当小棒位于该特定位置时,小棒与机器人的距离恰好为捡棒程序所要求的距离,可以捡起小棒.
4.2 最优路径返回
为了NAO机器人能够快速的回来,在NAO搜寻物体的时候需要记录下迷宫的路径信息.这样在回来的时候可以快速的返回到原点.结合深度优先搜索算法的思路,采取右巡线的策略,即"右-上-左"规则实现搜索物体[6-8].同时在遇到死胡同时,能够有效地删除路径信息,本文采用的编码方式为:右转为1;直行为2;左转为3.在图3所示中本文只选取了右拐,左拐右拐都存在,以及四岔口说明,其他的类似.右拐编码为[1,0],既有左转又有右转的双向路口时编码为[1,3],十字路口编码为[1,23].

图3 迷宫编码示意图
5 实验分析
5.1 定位及最优路径返回实验
实验中采用无人机和NAO机器人协同走迷宫.目前可以实现无人机对NAO的目标识别,同时可以实现无人机的同步跟踪以及对NAO机器人走迷宫的正确引导.如图4所示为对NAO的识别以及对目标物体的识别.

图4 对NAO的识别以及对目标物体的识别
5.2 目标抓取实验
在实验中被抓取的小棒被放置在箱体上面,箱子与小棒均设置为一定的高度.机器人对目标物体识别后继而定位,当Nao机器人走到距目标物体设定距离后则停止.然后执行预先设定好的抓取动作,对目标物体进行抓取.如图5所示为NAO抓取实验.
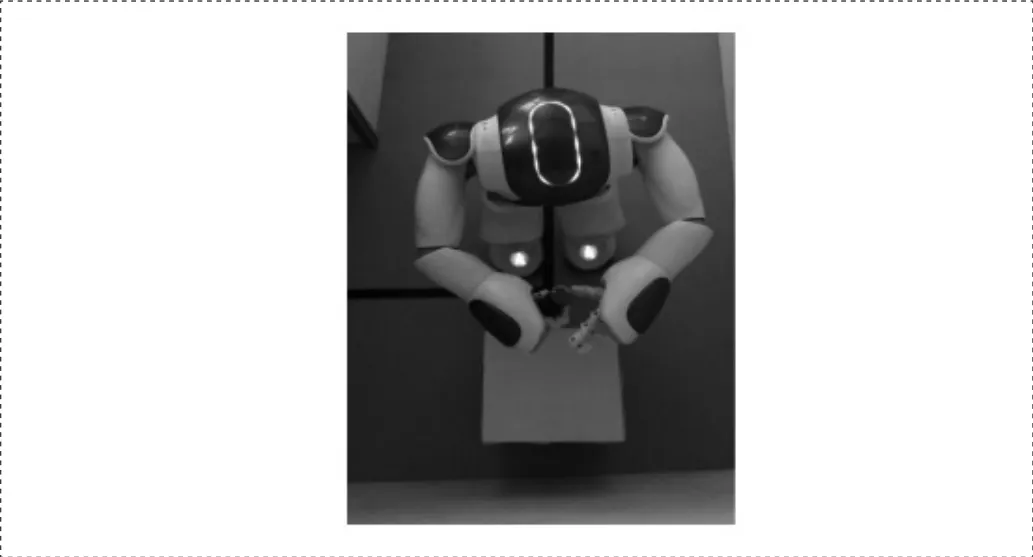
图5 NAO抓取小棒
本系统可以实现无人机与地面机器人协同搜索物体的目的,可以在复杂的环境中实现搜索,比如像未知情况的室内环境等.本系统实现了部分的功能,还有一部分功能待实现,以及需要改进的地方.
[1]谷丰,王争,宋琦.空地机器人协作导航方法与实验研究[J].中国科学技术大学学报,2015(05):398-404.
[2]郭芳.复杂环境下四旋翼无人机定位研究[D].天津大学,2012.
[3]李丹.基于视觉的空地机器人协作方法研究[D].沈阳理工大学,2013.
[4]袁丽.NAO机器人的视觉伺服物品抓取设计与实现[D].山东大学,2015.
[5]刘建.矿用救援机器人关键技术研究[D].中国矿业大学,2014.
[6]李道新.基于深广结合算法的迷宫机器人路径规划研究[D].湖南大学,2011.
[7]虞成诚,钟声,胡绍华.基于深度优先搜索的一般图匹配算法[J].计算机工程与科学,2008,(12):45-48.
[8]李道新.基于深广结合算法的迷宫机器人路径规划研究[D].湖南大学,2011.
注:本文获宁夏大学研究生创新项目资助(项目编号:GIP2017012).
车进.
