基于PLC的机械手控制项目教学研究
2017-11-15何惠湘
何惠湘
(南通航运职业技术学院,江苏 南通 226010)
基于PLC的机械手控制项目教学研究
何惠湘
(南通航运职业技术学院,江苏 南通 226010)
文章对基于PLC的机械手控制项目教学进行研究,机械手控制是"现代电气控制技术"课程中的一个教学项目,通过此项目的学习,培养学生在机电设备电控系统维修及机电设备电气设计等岗位群的职业能力.在教学过程中,以学生为主体,以工作过程为导向,实施教、学、做一体化的教学模式,使学生掌握状态转移图及步进顺控指令的应用方法.
PLC;机械手;项目教学
1 机械手概述
随着工业自动化程度的日益提高,企业生产现场有许多重体力以及重复性较强的工作逐渐被机器代替,既可以减轻工人的劳动强度,也可以大大提高生产效率[1].机械手是近几十年发展起来的一种高科技自动化生产设备,也是最早出现的工业机器人,它可代替人的繁重劳动,以实现生产的机械化和提高生产的自动化水平,尤其是在有毒和放射性等恶劣的环境下操作,对保护人身安全意义重大.因此,机械手已受到越来越多行业的重视,并且被广泛应用于机械制造、冶金、电子、轻工和原子能等部门,在生产企业中更是被广泛运用于自动化生产线中.
机械手是一种能模仿人手和臂的某些动作功能,在生产上用以按固定程序抓取、搬运物件或操作工具的自动操作装置[2].机械手的特点是可以通过可编程逻辑控制器(Programmable Logic Controller,PLC)编程来完成各种预期的操作,它的构造和性能上兼有人和机械手机器各自的优点.
2 项目任务
为了配合教学的需要,培养学生在机电设备电控系统维修及机电设备电气设计等岗位群的职业能力,更好地掌握机械手控制在现代电气控制上的应用,按照教学任务的要求,课程设置了一个机械手控制的教学项目.机械手搬运工件示意如图1所示,机械手将工件从左工作台搬运至右工作台.整个机械手能完成4个自由度的动作,即手臂伸缩、手臂旋转、手爪上下、手爪紧松.
当机械手爪处于初始状态时,即松开到位、左转到位、缩回到位及上升到位这4个条件都满足时,按下启动按钮,由PLC驱动机械手臂伸出手爪,下降并夹紧抓取工件,然后手臂上升缩回,向右旋转到右限位,之后手臂伸出,手爪下降松开,将工件放到右工作台,最后手臂上升缩回,向左旋转到左限位,完成一个动作周期.就这样,机械手周而复始,不断循环动作,把工件从左工作台送到右工作台上.当按下停止按钮时,机械手继续运行一个完整的动作周期后,回到原来位置停止.
在这个项目中,要求学生会运用步进顺控指令来设计机械手控制系统的梯形图程序,并且能够熟练运用编程软件进行联机调试.
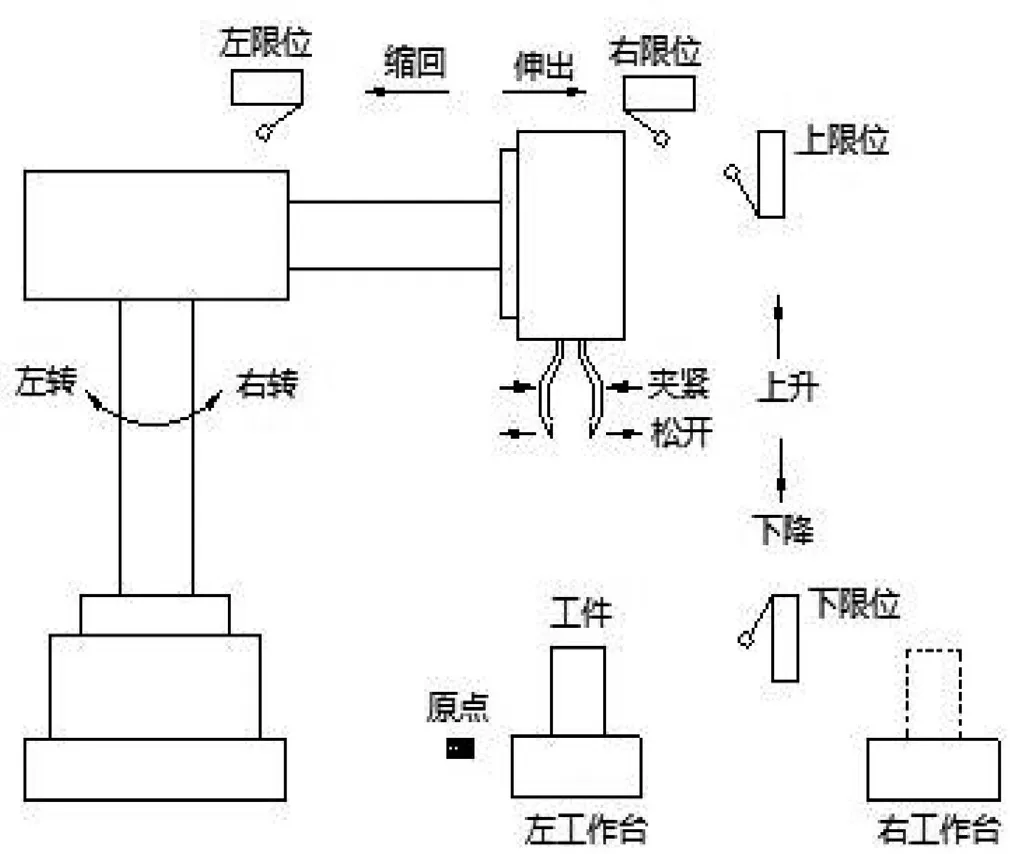
图1 机械手搬运工件示意
3 任务实施
根据机械手控制的项目任务和要求,学生分成小组,拟定任务实施的步骤.
3.1 画状态转移图
在机械控制中,许多设备的动作都有一定的顺序,经常需要顺序控制,如流水线、物件的搬运等,都是按照生产工艺预先规定的顺序进行的.这些动作的控制,在输入信号的作用下,根据状态和时间的顺序,使生产过程中的各个执行机构自动而有秩序地进行操作.在PLC的编程软件中,有专门的状态转移图和步进顺控指令.
机械手按照一定的顺序控制进行工作,要求学生按其动作过程画出状态转移图(见图2).其中,M8002是PLC开机初始脉冲,S0是初始状态,S20~S31是一般状态.由图可知,当PLC开机运行时,机械手进入初始状态,即复位状态:机械手松开、上升、缩回、左转;此时,按下启动按钮,机械手按照顺序,依次执行如下动作:伸出、下降、夹紧、上升、缩回、右转、伸出、下降、松开、上升、缩回、左转,完成一个动作周期.之后,周而复始,不断循环动作,直至按下停止按钮.
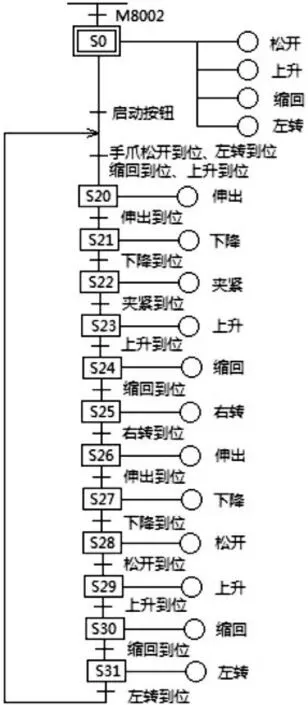
图2 机械手控制的状态转移
3.2 确定I/O分配表
根据机械手动作的控制要求,确定PLC的I/O分配表,如表1所示.

表1 PLC的I/O分配表
3.3 绘制PLC外部接线图
根据表1的PLC的I/O分配表可知,机械手的控制系统总共需要9个输入端口和7个输出端口,三菱FX2N系列的FX2N-32MR型PLC有16个输入端口和16个输出端口,完全能满足系统控制I/O点数的需要,故选用此型号的PLC.要求学生画出PLC的外部接线图,如图3所示,并分析电路的工作原理.
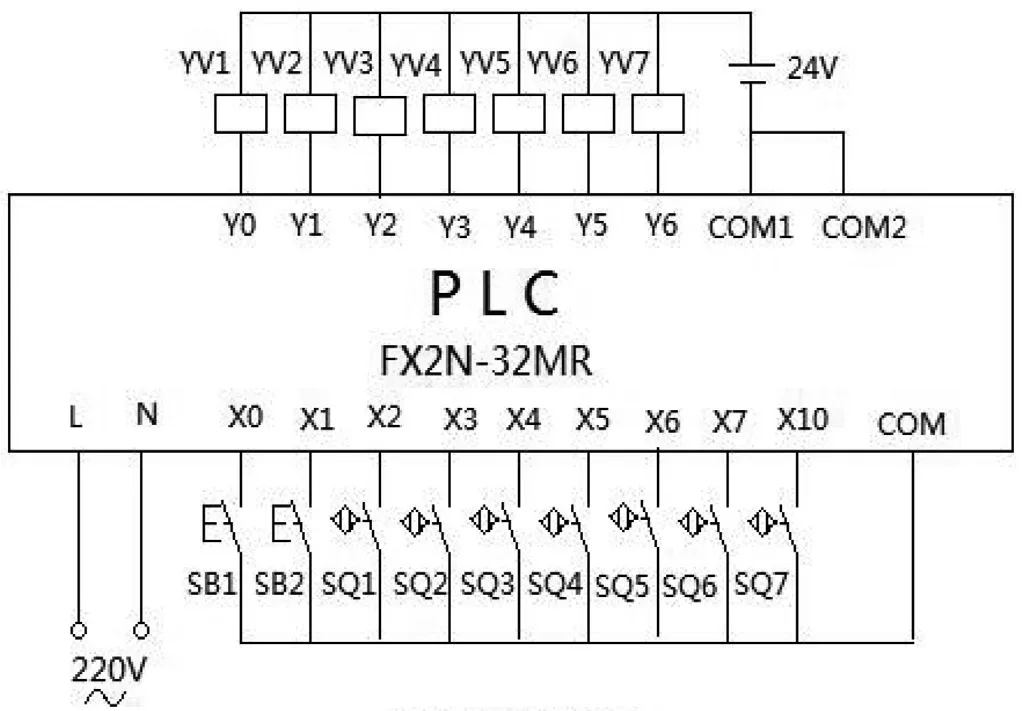
图3 PLC外部接线图
3.4 接线
首先将PLC的电源断开,然后按照PLC外部接线图来完成接线.接线要求牢固、整齐、清楚、安全和可靠,并且认真检查接线牢靠无松动,确保接线准确无误后再接通电源.
3.5 设计控制程序
学生根据项目任务的要求,按照图2中机械手控制的状态转移图设计梯形图程序.
3.6 程序调试
学生在编写好机械手的控制程序后,必须要将程序运行和调试,步骤如下.
(1)将程序编译检查正确后,下载到PLC.
(2)打开气泵的电源开关进行供气,调节气路,观察气路的方向及气压的大小是否符合要求,倘若不正确,调节节流阀和压力控制阀来调节气压的大小.如果是方向不对,可以对调电磁阀线圈的接线端子或者对调气管.
(3)运行程序,进行机械手控制的总体调试:按下启动按钮,观察机械手的动作是否按照任务要求来顺序动作,即以状态转移图的顺序动作.如果动作有误,则根据监控进行程序调试,直至完全正确,达到控制要求.最后按下停止按钮,机械手继续运行一个完整的动作周期后,回到原点位置,完成动作的调试.
(4)总结经验,把调试过程中遇到的问题及解决方法记录下来.
3.7 进行项目评价
学生在规定时间内完成机械手控制的项目之后,首先各小组对项目进行自我评价,然后教师对小组项目的实施情况进行验收和评价,评价的标准如表2所示.最后,教师对每个小组的项目完成结果进行评分.

表2 项目评价表
4 结语
通过机械手控制的项目教学,使学生熟悉了机械手的结构与功能,掌握了气动技术和传感器技术及PLC技术的综合应用,对三菱PLC的编程指令能够熟练应用,会画状态转移图和掌握步进顺控指令的使用.这种以学生为主体,以工作过程为导向,实施教、学、做一体化的项目教学模式,培养了学生在机电设备电控系统维修及机电设备电气设计等岗位群的职业能力,提高了学生自主学习和动手实践的能力,培养了团结协作的精神,达到了很好的教学效果.
[1]何振俊.机电一体化系统项目教程[M].北京:电子工业出版社,2014.
[2]曹京生,夏长凤.现代电气控制技术[M].北京:冶金工业出版社,2011.
Study on the project teaching of manipulator control based on PLC
He Huixiang
(Nantong Shipping College, Nantong 226010, China)
This paper studies the project teaching of manipulator based on PLC. The manipulator control is a teaching project in the course of "Modern Electrical Control Technology". Through the learning of this project, we can cultivate the professional ability of students in the electrical maintenance of electromechanical equipment and the electrical design of electromechanical equipment. In the teaching process, the students as the main body, the work process-oriented, the implement the teaching mode of integration of teaching,learning and doing, so that students master the state transition diagram and step-by-step control of the application method.
programmable logic controller; manipulator; project teaching
何惠湘(1972- ),女,湖南常宁人,副教授,硕士;研究方向:控制工程.
