基于徕卡Pegasus:Two移动激光扫描系统的地形图测绘
2017-11-14马锦山金万军郭德福
马锦山,金万军,郭德福
(西宁市测绘院,青海 西宁 810001)
基于徕卡Pegasus:Two移动激光扫描系统的地形图测绘
马锦山*,金万军,郭德福
(西宁市测绘院,青海 西宁 810001)
随着时代的发展,人们对测绘产品的精度和更新速度越加关注,传统测绘已经远远不能满足社会发展的需求,而且让机器代理人的劳动不仅会减少成本更会增加效率。本文主要介绍如何运用徕卡Pegasus:Two移动激光扫描系统做地形图测绘,并通过比对来检查它所能达到精度,看是否能够代替传统的测绘方式,实现外业向内业的转型。
地形图测绘;移动激光扫描;EPS
1 引 言
传统的地形图测绘,需要大量的测绘人员和设备(GNSS和全站仪),按照一定的编排组或自己特殊的工作方式组,到项目现场进行测绘工作。随着社会的发展,人们对测量工作精度和效率的要求也越来越高,传统的测绘方式已经无法跟上社会发展的脚步。移动车载扫描系统具有快捷、方便、准确、动态、实时、全数字化、灵活、非接触等特点,可以迅速获取对象物体的空间三维数据,同传统的测量方式相比,其获取数据的特点和方式,弥补了传统测量方法的弊端。譬如利用该项技术对某一区域扫描,采集点位密度大,数据信息丰富,可以真实反映现实环境,实现精细化测绘,同时带来工作效率提高,劳动强度降低,测绘投入费用减少等诸多好处[1~3]。
西宁市测绘院于2017年引进了徕卡Pegasus:Two移动激光扫描系统,此装备已经开始试运行,可安装在汽车、火车,对不同类型的环境、地形快速移动扫描,尤其是在地形图测绘、道路横断面分析中发挥了重要的作用。移动测绘系统使用的徕卡Pegasus:Two移动激光扫描系统通过非接触获取丰富的海量点云数据,方便我们对相关需要的信息提取,绘制出需要的地形图,本次我们选择湟中县迎宾路作为测试扫描对象进行作业。
2 作业原理
移动式激光扫描系统,是基于车载平台,由全球定位系统(GNSS)、惯性导航系统(IMU)、车轮里程计、全景相机系统结合站载式三维激光扫描系统组合而成的。外业采集过程中,利用GNSS全球定位系统以最高可达 20 Hz的频率实时获取系统当前位置,IMU惯导系统以 200 Hz的频率实时获取系统姿态角、加速度,辅以DMI车轮里程计获取车辆行驶距离,加上同一时段的静态GNSS基站或CORS参考站观测数据,采集完成后通过后差分解算处理,得到系统的精确运行轨迹。有了每一时刻的轨迹位置以及连续记录的相机影像和三维激光扫描点云,在软件中自动匹配对应时刻的轨迹位置和姿态,最终生成精确的带有绝对位置的三维点云和全景影像,点云上每一点都具有绝对位置坐标。
激光测距是三维激光扫描技术的核心,三维激光扫描的工作过程,实际上就是一个不断重复的数据采集和处理的过程。从获取扫描反射接收的激光强度,对扫描点进行颜色灰度的匹配。对于激光扫描仪而言,采样点是系统局部坐标,以扫描仪的轴系中心为坐标原点,一般X、Y轴在局部坐标系的水平面上,Y轴常为扫描仪扫描方向,Z轴为垂向方向。由此,可得扫描目标点P的坐标(XS、YS、ZS)的计算公式[4~5],如图1所示:
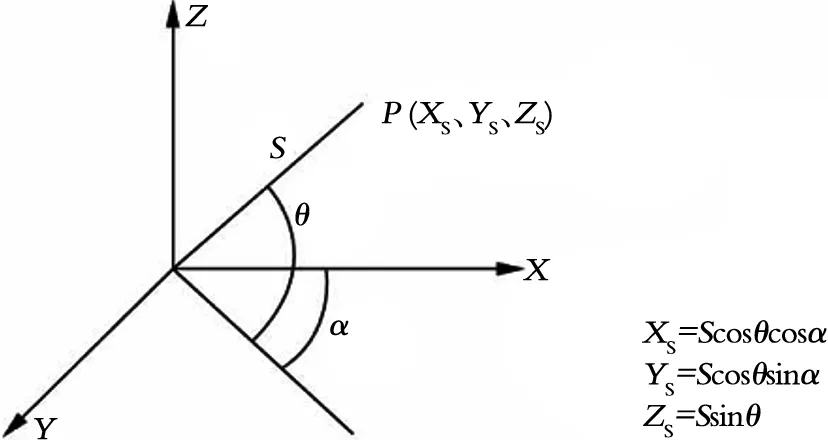
图1 三维激光扫描基本原理
3 技术路线
利用所获取的密集的点云数据,在AutoP自动数据处理软件中进行数据处理,然后利用处理好点云数据通过Mapfactory地理信息提取软件,可半自动的生成道路线形、路灯、广告牌、道路断面等,看着影像成图,根据不同要素建立图层,并作线画图。将这些图层导入到清华山维EPS软件中换码即可,具体流程如图2所示:

图2 工作流程图
3.1测前规划
应用徕卡车载三维激光扫描系统测量之前,最重要的一步就是规划,规划的好坏直接影响到工作的效率和成果的精度。规划主要包括对路线、车速、控制点、基站等。路线规划就是对整个测区的道路走向要深入了解,在测区附近要寻找天空开放的、车辆可以绕8字的场地进行初始化校准,在校准和开始扫描作业前要尽量保证GNSS信号良好,尽量不要通过树木遮挡严重,或隧道等影响信号的地方。同时要考虑测区每 10 km~20 km半径要架设至少一个GNSS基站或CORS站,基站架设的位置要开阔,要离信号塔等有信号干扰的地方至少 200 m,若测区范围内有大于 80 m的隧道需要规划布设控制点。一切规划做好和校检场地选好后就可以开始外业数据采集。
3.2外业数据采集
首先进行设备安装,一般需要3人~4人。将主机抬至车顶行李架横杆上,用螺栓和垫片固定;再将电池箱放置于后备厢中,用一根电源线缆连接电池箱和主机即可,安装设备如图3所示。

图3设备安装图
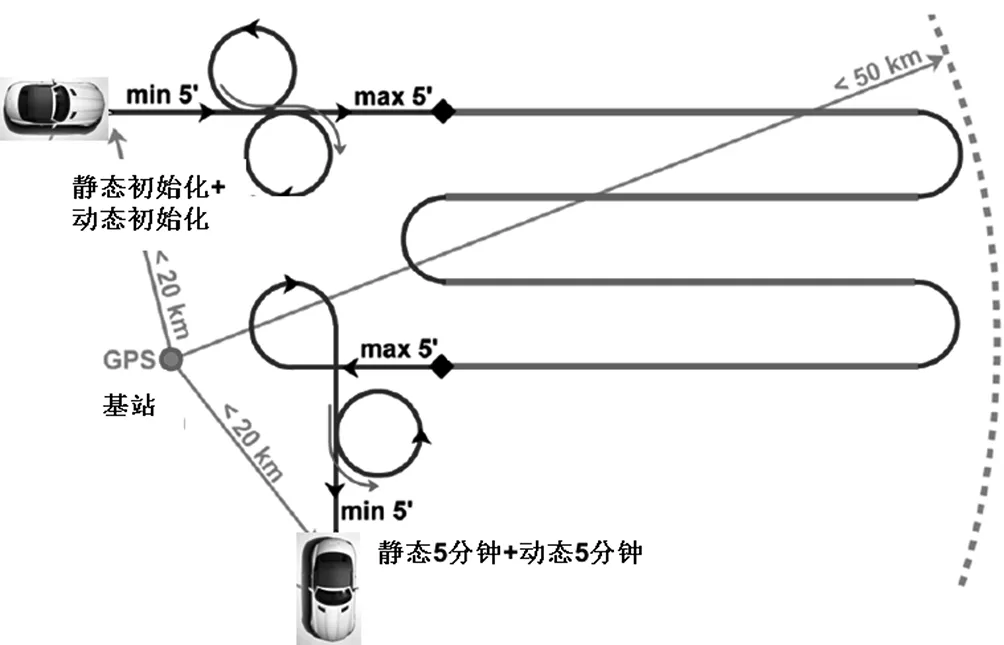
图4 外业扫描流程示意图
其次,按照外业扫描方案设计的路线和时间进行扫描,一般需要1名司机、1名~2名采集技术员。采集开始前,首先需要进行系统初始化,GNSS静态观测 5 min,接着进行车辆绕行8字,加、减速等步骤,目的是联合校准GNSS与惯导系统。初始化完成后,即可前往测区路线开始测量。采集完成后,前往开阔地带,GNSS静态观测 5 min,结束时可视测区卫星信号情况而选择是否进行8字绕行。至此,可结束当前测量任务,或继续进行下一测量任务。任务采集期间推荐速度为 10 km/h~60 km/h;避免长时间停车,禁止倒车;车辆尽量保持在道路中央,远离路旁树木建筑,最大程度避免GNSS信号遮挡;遇到大型车辆,尽量超车或避让,避免扫描仪遮挡。外业扫描设计方案如图4所示:
3.3车载移动测量数据处理
车载移动测量数据处理需分为以下几部分进行。
(1)轨迹解算
轨迹解算应用徕卡测量系统的IE(Inertial Explorer)软件,IE是用于轨迹位置及姿态解算的软件,由NovAtel提供。精确解算轨迹位置、速率及姿态,满足各项应用的需求。通过紧密耦合集成GNSS、IMU惯导、DMI里程计数据,Inertial Explorer可以提供精确的结果。IE操作简便,处理结果有较大的改善。图5是解算后的轨迹,通过图6轨迹结算成果文件可以看出精度达标。
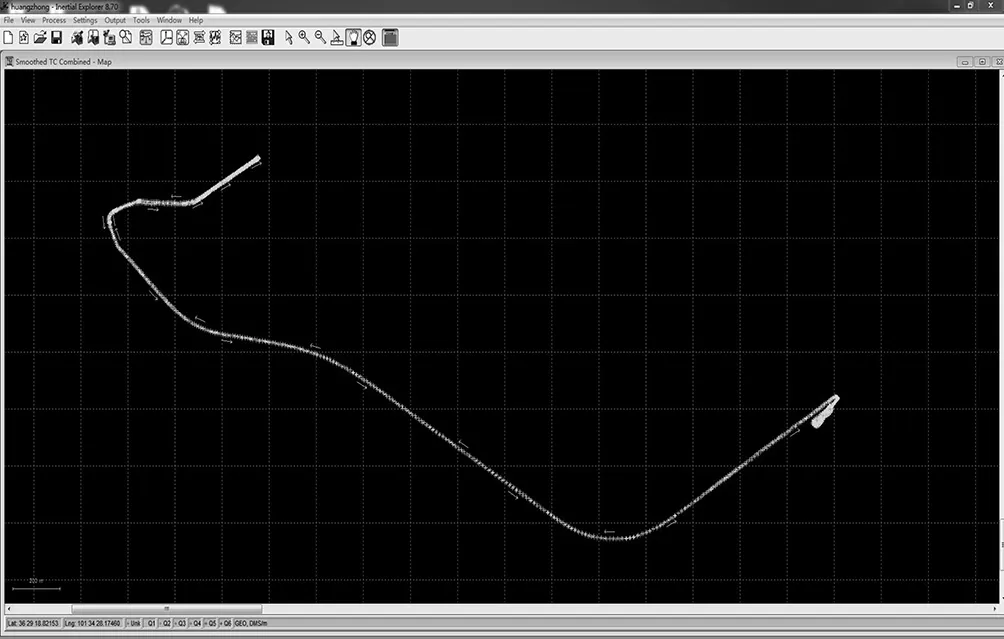
图5 解算后的轨迹
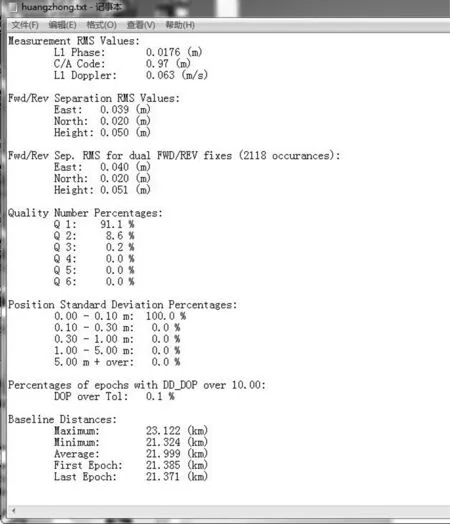
图6 解算后的轨迹文件
(2)AutoP点云和影像数据处理
Leica AutoP(Pegasus Automatic Processing)是徕卡测量系统专门用于Pegasus车载测量系统原始数据处理的软件,如图7所示。它可以一键全自动挂机处理采集的数据,同时生成影像、点云、导出数据,操作简便,功能丰富,内容包括:提取影像数据、生成外方位元素,提取激光数据、生成激光点云,拼接360°全景照片,点云RGB着色,还支持导出其他标准格式的影像和点云。图8是AutoP处理完的点云和影像的效果图。处理完的成果坐标为WGS84坐标,如果需要本地坐标则可以通过infinity软件将点云数据和影像数据通过点对校正的方式转换成本地坐标。
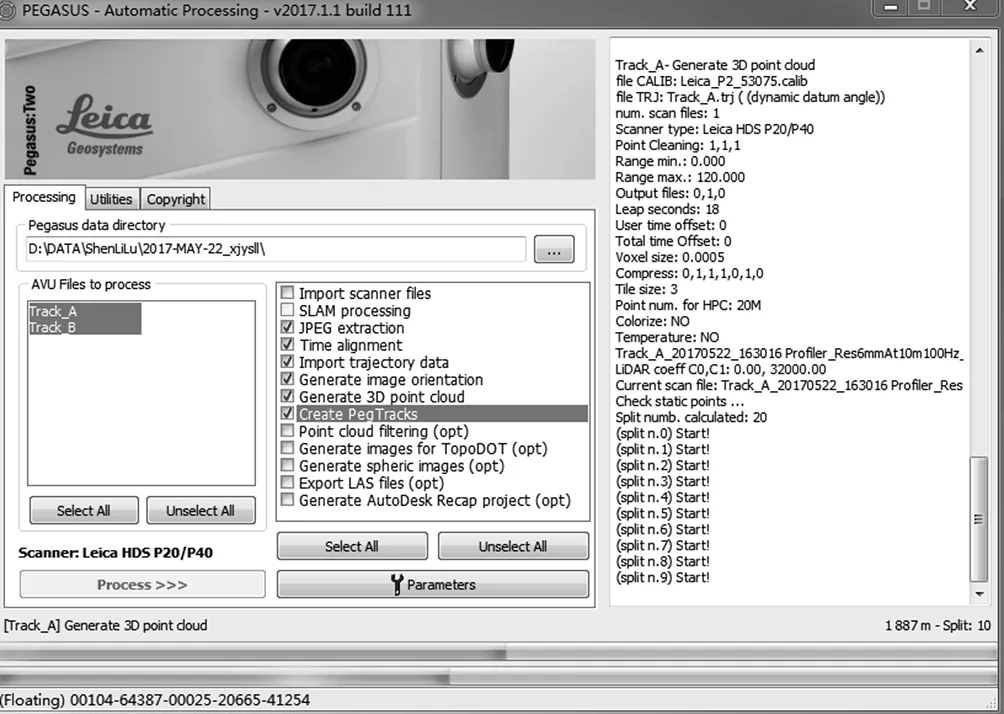
图7 AutoP中处理

图8 点云数据和影像数据对比
(3)在Mapfactory中做线画
将AutoP中处理完的结果加入到Mapfactory中后,不同的地理要素创建不同的图层并进行线画。主要是利用软件的点云筛选和视角切换功能对点云进行过滤显示,在过滤后的点云上完成特征线和点的采集,当采集路边线数据时,可将高于路面的点云暂时过滤掉,仅利用路面部分点云进行特征线的采集,对于路灯广告牌等设施在Mapfactory可以实现半自动的提取,大大减少了内业处理的时间。通过此种方法,可以较快地获取建筑物、路边线、绿化带等特征地物的特征点和特征线,同时,为了避免遗漏或者看不清部分点云数据时可以将影像数据叠加进来,边看影像边画。最后按图层导成.shp格式。如图9所示为做出的成果图:
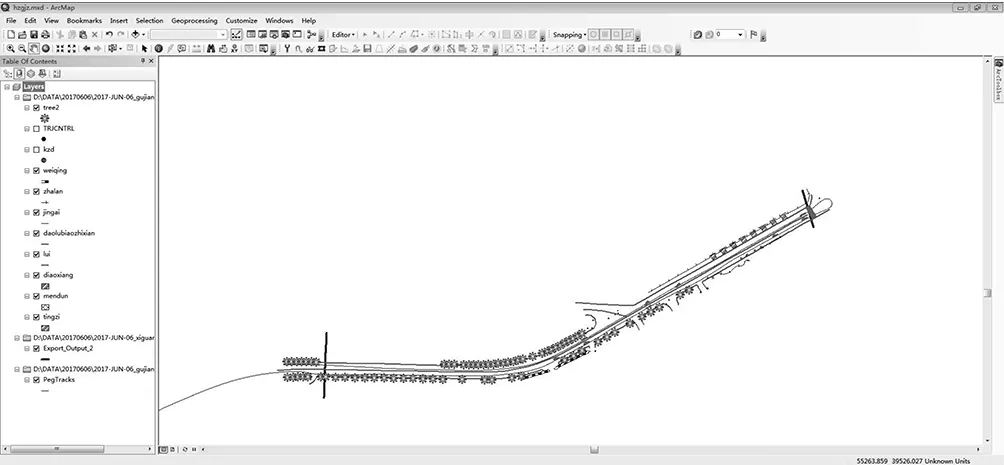
图9 Mapfactory中的线画图
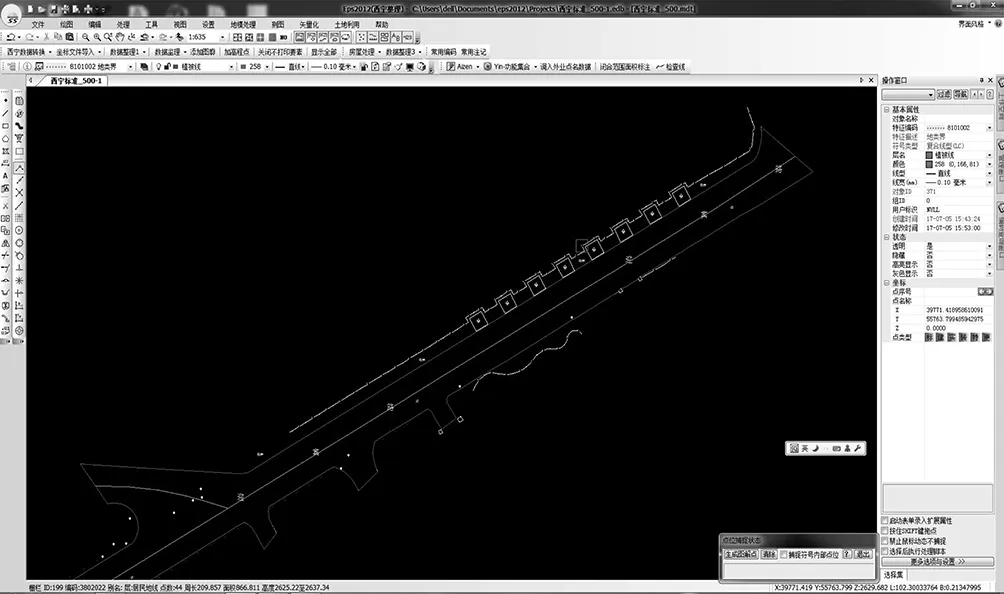
图10 最终成果图
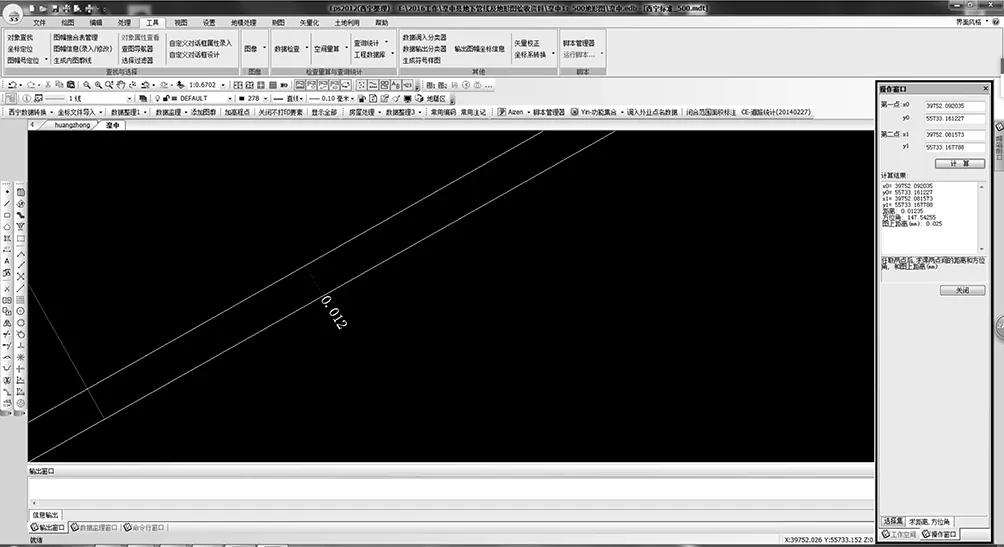
图11 精度对比图
(4)在EPS中换码
EPS软件是我院统一的制图及入库平台。将导出来的shp格式数据导入到EPS中,并根据不同的层进行换码构面[6],并导出edb格式的地形图,如图10所示为最终成果。将成果数据加载到之前用全站仪的采集的 1∶500地形图成果数据中对比可以看出最高精度可以达到 1 cm,总体精度能够保证在 5 cm以内,基本上满足 1∶500地形图测绘,如图11所示。
4 结 语
相较于传统测量,徕卡PegasusTwo移动激光扫描系统,不仅能获得更密集的点位坐标数据,还极大地节省了人力和物力的投入。随着时代的发展传统测绘势必将会被新型的测绘产品所取代。将外业转化为内业已经是种趋势,通过上述精度我们发现三维激光扫描仪将会加快这一趋势[7]。大数据时代,我们将会用徕卡PegasusTwo移动激光扫描系统获取海量的地理信息数据,不断研究它所能提供的测绘产品,为政府和社会提供更快速、更准确的测绘地理信息产品。
[1] 张攀科,裴亮,王留召等. 车载激光扫描系统在地籍测量中的应用[J]. 测绘科学,2015,39(9):163~166.
[2] 吴晓章,谢宏全,谷风云等. 利用激光点云数据进行大比例尺地形图测绘的方法[J]. 测绘通报,2015(8):90~92.
[3] 韩尚. 车载LiDAR用于轨道线带状图测量的高程精度分析[J]. 测绘通报,2016(3):70~72.
[4] 侯亚娟,葛中华. 车载移动测量系统在大比例尺地形图质检工作中的应用研究[J]. 测绘通报,2015(11):60~63.
[5] 杨伯钢,韩友美. 车载移动激光扫描技术大比例尺测图技术分析[J]. 测绘科学,2013,37(1):106~108.
[6] 梁玉斌. 面向建筑测绘的地面激光扫描模式识别方法研究[D]. 武汉:武汉大学,2013
[7] 李芸. 机载激光雷达(LiDAR)的数据处理和山区脊谷特征提取研究[D]. 西安:长安大学,2013.
BasedontheLeicaPegasus:TwoMobileLaserScanningTopographicSurveyoftheSystem
Ma Jinshan,Jin Wanjun,Guo Defu
(Xining Institute of Surveying and Mapping,Xining 810001,China)
With the progress of time,accuracy and speed of surveying and mapping products are getting more and more attention. While traditional surveying and mapping cannot satisfy the requirement of social development,machine agents labor will not only reduce the cost but also increase the efficiency. This paper mainly introduces how to use the leica Pegasus:Two mobile laser scanning systems for topographic survey,which can achieve its accuracy by checking and comparison,finding whether can replace the traditional way of surveying and mappying in the field of industry transformation.
topographic survey;mobile laser scanning;EPS
1672-8262(2017)05-119-04
P234.4
B
2017—07—15
马锦山(1992—),男,助理工程师,主要从事三维激光扫描应用研究。