牵引供电远动系统安全闭锁功能研究
2017-11-14剧斌呼和浩特铁路局调度所
剧斌 呼和浩特铁路局调度所
技术交流
牵引供电远动系统安全闭锁功能研究
剧斌 呼和浩特铁路局调度所
供电调度远动装置增加安全互锁功能,可以同时对多条线路、多条供电臂进行闭锁检测,能够确保供电调度在执行停送电作业过程中做到准确记录停送电作业,按序完成计划,防止误停、误送电现象的发生。该软件开发完成后可记录单一供电臂对应的作业组数,按照作业的先后完成顺序,实现作业之间的相互闭锁关系,待全部作业完成后,经调度员消令确认之后,方可解锁送电,可最大限度的减少误送电可能性,以此来保障现场作业人员的人身安全及设备安全。
远动装置 闭锁检测 闭锁关系 误送电
1 研制的目的与现状
由于铁路实行天窗作业的特殊性,加之铁路牵引供电系统的停电作业对铁路运输的影响面大,供电调度员除与现场人员的联系外,还要与列车调度员对接,一个时间段内又穿插有多项作业,特别是在多种作业方式交叉、嵌套时,会造成供电调度人员误送电,误送电一方面会对现场作业人员的人身安全构成极大的威胁,另一方面极易造成对供电、电务等行车设备的损害,进而影响铁路的正常行车秩序,因此供电作业安全是目前铁路部门面对的一大课题,在远动操作系统增加功能以避免和防止误操作成为供电调度的研究方向。
牵引供电操作,我局多年以来一直采用人工检索执行计划方式。这种方式存在如下诸多问题:
1)采取人工检索计划,容易造成计划遗漏。
2)采用人工直接进行停送电作业,容易发生误操作。
鉴于上述原因,急需研制一种方案、确保远动系统能够严格按照计划有序进行停送电作业。
研究主要内容:
1)安全闭锁方案整体结构设计和算法研究
2)闭锁算法的选择和研究
3)作业嵌套和作业叠加技术的研究
4)计划的管理和操作的研究
5)供电臂管理的研究
6)供电臂和操作对象关联的研究
2 牵引供电操作闭锁功能的组成及各部分功能
硬件布局如图1所示:
牵引供电操作闭锁功能主要由计划管理、供电臂管理、操作和闭锁检查四部分组成。如下图2所示。
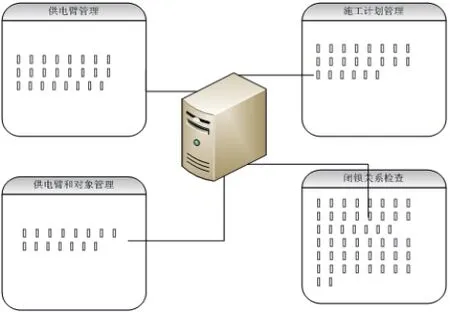
图2 牵引供电远动系统安全闭锁功能结构图
2.1 计划管理
计划管理,是牵引供电安全闭锁操作的核心,包括:计划的制定,计划的编号、标题、涉及的线路和供电臂,计划是否完成等内容。
2.2 供电臂管理
包括供电臂的定义,供电臂的维护及和线路关系的维护,供电臂的增加,删除,修改和查询等功能。
2.3 供电臂和操作对象关联关系管理
正常的远动监控系统中,都是以面向对象的设计思想而设计的,作业中,对开关或者刀闸的操作都是以开关和刀闸作为操作对象。但是在制定作业计划时,是以线路为基础进行制定计划的,包括多个操作对象,由于这种不同业务领域之间的关系的差异,因此必须定义供电臂和操作对象之间的关系,并且能够对这种关系进行相应的维护操作。
2.4 闭锁关系检查
对开关或者刀闸进行操作时,必须进行计划的闭锁检查,对在计划中的开关和刀闸进行闭锁控制。简单的闭锁检查只要检查该操作对象是否在计划中被允许即可,对于计划嵌套的计划,除了检查当前计划以外,还要检查上一级计划是否完成,对于处于交叉区域或者叠加区域的操作对象,还要检查其他的计划是否允许操作。
3 牵引供电操作闭锁功能的设计
牵引供电安全闭锁功能的主要目的就是为了确保安全性,算法关键在于保证闭锁的准确性、安全性,闭锁算法的选择对于整个系统至关重要。因此,设计时我们着重对安全闭锁关系的安全性和准确性进行考虑。
3.1 方案选择
安全闭锁方案的选择是设计的重点和难点,我们设计是能够准确的定位每个操作对象和相应的供电臂是否在计划中,如果符合计划,则允许执行,否则禁止对相应的对象进行操作。
设计时需要综合考虑计划的嵌套,确保和操作对象相关的所有计划都允许操作,才能够进行操作。
因此,本课题中采用了基于规则闭锁系统的安全闭锁算法。包括了对于规则的验证,规则的管理、规则的触发和执行。在应用中,可以跟实际的系统结合,有效的根据事件触发执行规则中的动作,对系统进行闭锁检查。
本课题提出的规则闭锁系统主要由以下几部分组成,规则输入、规则验证、规则管理和规则执行部分。规则系统在系统的上层,规则输入作为用户接口,与用户交互,规则验证和规则管理是规则内部的处理逻辑,对规则进行合法性验证和功能处理。规则的执行与底层系统紧密相关,需要底层的支持。整个规则系统的体系结构如图3所示:
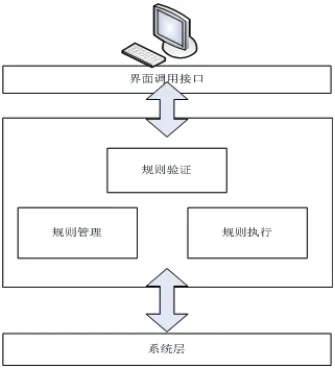
图3 安全闭锁规则系统的体系结构
3.2 计划管理的设计组成
3.2.1 数据库模块
在计划的管理模块中,内容主要包括计划号、线路、供电臂和相应的操作对象。
3.2.2 数据库管理和维护模块
包括计划的存档、修改、删除、查询、打印等功能。
3.3 供电臂管理的设计组成
3.3.1 数据库模块
供电臂管理模块内容主要包括供电臂名称、代码、和线路等信息。
3.3.2 数据库管理和维护模块
供电臂数据库维护和管理模块包括,供电臂的输入、存档、修改、删除、查询、打印等功能。
3.4 安全闭锁检查功能的设计过程
1)开始操作,遥控操作程序把要操作的对象和相应的操作发送到计划管理服务器。
2)计划管理服务器,接收到相应的需要操作的对象和相应的操作送到闭锁规则检查库中进行规则检查,经过各种规则的推理之后,规则系统给出推理结果。
3)计划把闭锁规则检查系统的推理结果发回到调度员工作站。
4)操作员的工作站根据规则闭锁系统的返回结果判定本次结果是否能满足操作要求来决定是否能够操作。
4 安全闭锁功能的实施步骤
4.1 基础数据的录入
实施前,首先录入和系统相关的基础数据,包括线路的定义,线路代码、线路名称,供电臂编号、名称,线路和供电臂之间的关系,供电臂和操作对象之间的关系。
4.2 计划的导入
首先要根据实际情况导入制作计划,包括计划的名称,计划涉及的线路和供电臂和相关班组。
4.3 计划的执行过程
1)开始操作,遥控操作程序在后台把要操作的对象和相应的操作发送到计划管理服务器。
2)计划管理服务器,接收到相应的需要操作的对象和相应的操作送到闭锁规则检查库中进行规则检查,经过各种规则的推理之后,规则系统给出推理结果。
3)计划把闭锁规则检查系统的推理结果发回到工程师站。
4)闭锁检查结果满足执行条件,停电时系统会提示“本次操作在正常的计划中,可以操作!”,如果不满足执行条件,系统会提示警告信息“警告,本次操作不在计划之内,是否强制执行,并且这种执行具有危险性!”,来提示操作员本次操作的风险性,由操作员来决定是否执行本次操作。执行停电操作后系统会启动闭锁条件,当作业结束,所有闭锁条件均解除,满足送电条件时,方可执行送电操作。当调度员由于确认不到位,执行送电操作时系统会返校失败拒绝操作,并会发出提示告警告信息“警告,本次操作危险!”。
5 模拟实验
5.1 搭建模拟平台
以含A供电臂和B供电臂有施工计划为基准,进行相应的施工计划闭锁实验,对功能进行验证。
5.2 简单施工计划安全闭锁
首先进行简单的单个施工计划闭锁。
1)不制定施工计划,选择一个开关进行停电遥控,当执行遥控操作时,系统提示“警告,本次操作不在施工计划之内,是否强制执行,并且这种执行具有危险性!”,点击取消,遥控操作退出,点击执行,遥控强制执行,遥控操作成功。
2)制定一个施工计划,并且该计划中包括该操作对象涉及到相应的供电臂。当执行遥控操作时,系统提示“提示,本次操作在施工计划之内,是否执行?”,点击取消,遥控操作退出,点击执行,执行正常遥控操作,停电遥控操作成功后加入闭锁条件,执行送电操作时,该供电臂上施工计划结束解除闭锁,点击送电,遥控操作成功。该供电臂上施工计划未结束,点击送电,遥控操作失败。
5.3 复杂施工计划安全闭锁对应几个施工计划该供电臂上就添加几个闭锁条件
1)首先制定一个施工计划A,然后制定一个该施工计划的子计划A1,启动A计划和A1计划都包含相应操作对象的供电臂。
2)首先进行开关操作,执行时显示,当前操作在计划中,能够正常操作。
3)A计划和A1计划停电遥控操作成功后加入闭锁条件,即对应几个施工计划该供电臂上就添加几个闭锁条件,执行送电操作时,该供电臂上施工计划全部结束解除闭锁,点击送电,遥控操作成功。该供电臂上施工计划未全部结束,点击送电,遥控操作失败。
6 施工计划安全闭锁功能的优点
①闭锁功能准确,完全采用计算机进行闭锁关系检查
②检测闭锁时间短,工作效率大幅度提高
③可以同时对多条线路、多条供电臂进行闭锁检测
④操作过程简单、方便,减轻了工作人员的工作负担
⑤检测过程操作端完成,避免了人工检查的弊端,安全性高
7 结束语
计划闭锁功能是我们经过学习调研,吸取路内其它单位失败经验并结合实际应用需求提出的。该研究设计的计划闭锁功能,紧密结合实际,具有极高的推广应用价值。
[1]J.Bhasker.Verilog HDL硬件描述语言[M].徐振林.北京:机械工业出版社,2006:1~116.
[2]柳永智.电力系统远动.中国电力出版社,2006-10
[3]屈志坚陈剑云分布式远动调度系统中实时数据库的研究与实现计算技术与自动化2004年01期
[4]高速铁路接触网安全工作规则TG/GD108-2014
[5]普速铁路接触网安全工作规则TG/GD115-2017
