直驱阀控制系统设计及验证
2017-11-13王少永李华忠彭国华
张 宇,陈 珂,王少永,李华忠,彭国华,罗 星
直驱阀控制系统设计及验证
张 宇,陈 珂,王少永,李华忠,彭国华,罗 星
(中国航发控制系统研究所,江苏无锡 214063)
为提高直驱阀系统的动态特性和稳定性,设计了1种位置环加电流环的直驱阀双闭环控制系统,其中位置环采用比例积分控制加相位超前校正,电流环采用比例积分控制。在M A TLA B平台上,开展了电流环仿真、位置环的参数辨识以及仿真;在由D SP和FPG A构成的验证平台上,开展了试验验证,电流环与位置环的控制效果与仿真模型均一致,获得了400 H z以上的电流控制带宽和25 H z以上的位置控制带宽。研究结果表明:此控制器设计及校正方法可有效提高直驱阀系统的动态特性和稳定性。
直驱阀;超前校正;模型识别;双闭环控制;航空发动机
0 引言
在航空发动机数字控制系统中,传统电液伺服阀作为主要的电液转换元件被广泛应用于油针、导叶、矢量喷管等伺服回路的控制。然而,由于传统电液伺服阀存在一些致命缺陷(结构复杂、抗污染能力差等[1]),其故障已经成为发动机数字控制系统最主要故障来源之一。直驱阀(Direct Drive Valve,DDV)的出现则从根本上解决了这些问题。较之传统电液伺服阀,直驱阀利用力(矩)马达直接驱动主阀芯,没有尺寸精密的喷嘴挡板及射流嘴等易堵塞的结构,抗污染能力强、可靠性高,是伺服阀的主要发展趋势[2-5]。
国外早在20世纪80年代就已经开始将DDV应用于各种主战飞机的飞控系统中[6]。国内DDV的研究起步较晚,文献[7]成功将DDV应用于飞机的刹车系统中;文献[8-9]将DDV应用于飞机的飞控系统中,获得较好的控制效果;文献[10]基于H桥和可编程器件开展了直驱阀驱动器的硬件设计及控制逻辑设计;北航蔚永强等就直驱阀系统的余度控制策略开展了详细建模和仿真,有效克服余度降级带来的系统性能下降,改善了系统的品质[11];王大彧等又将模糊PID控制应用于音圈电机的控制,获得了较好的抗干扰性和鲁棒性[12];夏立群等还就阀芯摩擦力模型开展建模,并设计了基于摩擦力补偿的自适应补偿器,改善了DDV的性能[13]。
在航空发动机控制及有着高安全需求的应用场合,控制系统的设计需均衡考虑系统复杂度、性能、寿命等指标。本文设计了1个基于位置环和电流环的双闭环控制系统,并利用经典控制的理论和方法,设计电流环的控制参数,获得了满意的控制效果;利用阶跃响应辨识了位置环的模型参数,将超前校正应用于DDV的位置闭环控制中,改善了位置环的动态特性。
1 DDV控制系统组成
DDV闭环控制的目的是使得DDV的阀芯位置可以实时跟踪输入的位置给定值,为此可采用位置环+电流环的双闭环串级控制,亦可采用位置环+速度环+电流环的3闭环串级控制[14-15]。增加速度内环可以明显改善位置控制的动态特性和稳定性,但受到传感器的限制,在实际工程中难以获得有效的DDV阀芯速度信号,因此,在DDV的位置控制中,位置环+电流环的双闭Pc为位置指令信号,Ic为电流指令信号,U为斩波器输出的平均电压,Io为阀实际电流值,Po为阀的实际位置值。位置环通过对位置指令与位置反馈之间的误差计算获得电流环的指令信号,电流环则通过对电流指令与电流反馈之间的误差计算获得占空比控制信号,电流环的存在既可以有效抑制母线电压波动对位置控制的影响;又可以防止DDV过流,从而保证DDV的安全。
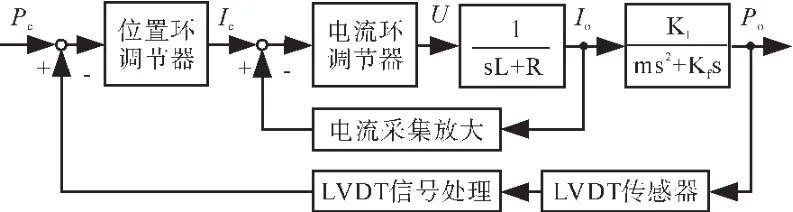
图1 DDV控制系统组成
2 电流环控制器设计及验证
DDV力矩马达的绕组可视为电感和电阻的串联模型,绕组电流I(s)与驱动电压U(s)之间的关系为

电流环若采用纯比例控制,则电流环为I型控制系统。阶跃响应无超调,但存在稳态误差,理论上通过增大开环增益可将误差控制在可接收的范围内,但在具体工程实现时,由于电流采样环节不可避免地会给系统引入高频干扰信号,过分增加开环增益极易造成系统振荡,因此,电流环采用比例-积分控制更为合适。在保证系统稳定的前提下,尽可能增加比例增益,以使得系统具有较高的动态响应能力,通过适当的积分补偿使得系统阶跃响应无稳态误差,为防止退饱和时间过长,积分环节也需增加适当的积分限幅。
对电流环建模如图2所示,开环波特如图3所示。从图中可见,穿越频率约为423 Hz,相角裕度约为83.3°,系统处于稳定状态。

图2 电流环闭环模型

图3 电流环开环波特
在仿真模型中,电流环对400 Hz、±0.2 A正弦电流指令信号的跟踪效果如图4所示。
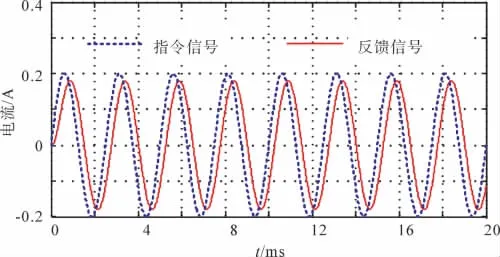
图4 电流环仿真模型跟踪控制
鉴于DDV线圈的电阻为4.5Ω,电感为3 mH,即电气时间常数为0.67 ms,综合考虑斩波频率和PWM的分辨率选用68 μs的斩波周期,即斩波频率为14.7 kHz,占空比分辨率为1/2040。将采样电阻直接串联在DDV线圈回路中,选用双向高共模输入的差分放大器LT1999,将采样电阻两端电压信号放大,放大后的信号输入至高速串行AD中采集。鉴于电流环运算频率较高,为降低CPU的工作负荷,电流环的采集、计算任务由FPGA(A3P1000)实现。在每个控制周期(68 μs)内,FPGA完成 AD采集、偏差计算、积分和累加(积分限幅)、比例项乘法计算、积分项乘法计算以及占空比输出等任务,为降低FPGA的资源利用率,比例项乘法运算和积分项乘法运算通过时分复用的形式共用1个乘法器。实测电路对100、400 Hz电流指令的跟踪效果如图5所示。从图中可见,实测模型与仿真模型的一致性较好,电流环可保证400 Hz以上带宽。

图5 实测电流环跟踪控制
3 位置控制器设计及验证
3.1 位置环模型识别
由于电流环带宽在400 Hz以上,远高于位置环的带宽(一般不超过40 Hz),在分析位置环控制时,可将电流环等效成理想的比例环以简化分析。
阀芯受力可简化成如图6所示模型。图中:KI为电磁力常数,Kf为阻尼系数,m为阀芯质量。由于本文所涉及DDV无回位弹簧,阀芯只受电磁力和阻尼力的作用(忽略液动力),阀芯力平衡关系为

对其进行拉普拉斯变换可得阀芯位移与线圈电流之间的传递函数关系为

图6 阀芯受力模型
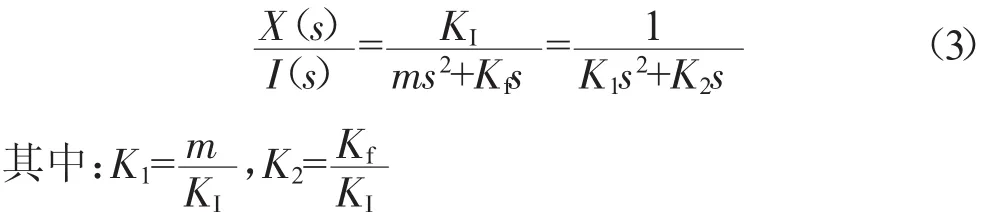
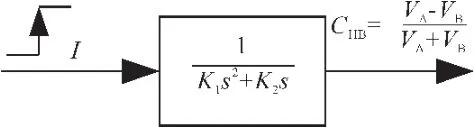
图7 阀仿真模型
可将阀建模成仿真模型,如图7所示。其中CHB为LVDT传感器输出的差和比信号(bit值表示,为差和比数值乘4096),对实际DDV施加1 A电流阶跃信号,位置环阶跃响应曲线如图8所示。其输出信号波形为实线所示,通过调整仿真模型中K1、K2的系数,对比仿真模型输出和实测输出的区别,多次拟合后可得当K1=1.5×10-7、K2=3.3×10-7时,仿真模型与实测模型的阶跃响应波形较为接近,如图中虚线所示。因此可将阀的传递函数近似为


图8 位置环阶跃响应曲线
3.2 位置环控制器设计
位置环波特如图9所示。虚线为阀的开环特性曲线。选取适当的开环增益,使得位置闭环的开环穿越频率发生在25 Hz左右(即期望位置环获得25 Hz左右的带宽)。实线为系统开环特性曲线。可见位置闭环系统的开环特性的相频特性在大于3 Hz后的频段距离-180均较近,系统的稳定性较差,因此在保证系统动态特性的前提下,考虑采用串联超前校正环节以提高系统的稳定裕度,拟将系统带宽设计在25 Hz左右,且将该点相频特性向前校正30°,设计校正环节传递函数为


图9 位置环波特
校正后的系统特性如图中点划线所示,穿越频率约为29 Hz,相角裕度31°,系统稳定。对比如图10所示校正前后的阶跃响应曲线可见,校正前系统阻尼过小,振荡时间较长;校正后系统虽仍有振荡,但可以迅速稳定,上升时间约为10 ms。

图10 仿真模型阶跃响应曲
以1 ms为控制周期,对上述设计控制算法进行离散化,并在TI TMS320F2812型DSP中编程实现,在实际工程中考虑到静摩擦等非线性因素的存在,为消除稳态误差,控制器采用比例+积分控制,并串联超前校正环节,试验所得较正前后的阶跃响应曲线如图11所示。从图中可见,校正前系统稳定性较差(由于静摩擦力等非线性因素的存在,较正前的实测系统响应比仿真模型好),校正后系统经过1次振荡便可稳定,上升时间约为10 ms,与仿真模型的一致性较好,可保证位置环为25 Hz以上带宽。

图11 实测模型阶跃响应曲线
4 结论
以经典控制理论的方法,分别对DDV的电流环和位置环开展建模和控制参数的设计。电流环控制器采用比例-积分调节,并在FPGA中工程实现,获得400 Hz以上带宽,实测结果与仿真结果一致。利用阀的阶跃响应曲线辨识了阀的模型参数,采用超前校正改善了位置环控制的性能,并在基于TMS320F2812的DSP硬件平台上开展所设计控制算法的验证,实测结果与仿真结果一致,获得了25 Hz以上带宽。
[1]郭宏,蔚永强,邢伟.三余度直接驱动阀驱动控制系统[J].北京航空航天大学学报,2007,33(11):1286-1290.GUO Hong,YU Yongqiang,XING Wei.Triplex-redundancy control system for Direct Drive Valve [J].Journal of Beijing University of Aeronautics and Astronautics,2007,33(11):1286-1290.(in Chinese)
[2]王大彧,郭宏.基于扩张状态观测器的直驱阀用音圈电机控制系统[J].中国电机工程学报,2011,31(9):88-93.WANG Dayu,GUO Hong.An extended state observer based control system of voice coil motor used in Direct Drive Valve [J].Proceedings of the CSEE,2011,31(9):88-93.(in Chinese)
[3]方群,黄增.电液伺服阀的发展历史、研究现状及发展趋势[J].机床与液压,2007,35(11):162-165.FANG Qun,HUANG Zeng.Developing process research actuality and trend of electro-hydraulic servo valve[J].Machine Tool&Hydraulics,2007,35(11):162-165.(in Chinese)
[4]肖俊东,王占林,陈克昌.新型高性能直接驱动电液伺服阀[J].机械科学与技术,2005,24(12):1423-1425.XIAO Jundong,WANG Zhanlin,CHEN Kechang.A new type high performance direct-drive electrohydraulic servo valve [J].Mechanical Science and Technology,2005,24(12):1423-1425.(in Chinese)
[5]李磊,赵升吨,范淑琴.电磁直驱式大规格电液伺服阀的研究现状和发展趋势[J].重型机械,2012(3):17-24.LI Lei,ZHAO Shengdun,FAN Shuqin.Research status and development trend of large gauge electromagnetic direct drive electro-hydraulic servo-valve[J].Heavy Machinery,2012(3):17-24.(in Chinese)
[6]谢奕胜,李小民,韩志华.基于双级式DDV作动器的伺服控制系统设计[J].电力电子技术,2011,45(9):29-31.XIE Yisheng,LI Xiaomin,HAN Zhihua.The design of servo control system for dual-stage DDV actuator[J].Power Electronics,2011,45(9):29-31.
[7]刘劲松,周世民,何学工,等.飞机刹车系统应用直接驱动伺服阀(DDV)的研究[J].航空精密制造技术,2013,49(2):48-51.LIU Jinsong,ZHOU Shimin,HE Xuegong,et al.Research on aircraft braking system by using direct drive servo valve[J].Aviation Precision Manufacturing Technology,2013,49(2):48-51.(in Chinese)
[8]韩志华,李小民,夏立群.基于DSP的直接驱动阀式作动器控制技术研究[J].系统仿真学报,2009,20:277-280.HAN Zhihua,LI Xiaomin,XIA Liqun.The research of DDV actuator control technology based on DSP system[J],Journal of System Simulation,2009,20:277-280.(in Chinese)
[9]夏立群,张新国.直接驱动阀式伺服作动器研究 [J].西北工业大学学报,2006,24(3):308-312.XIA Liqun,ZHANG Xinguo.Development of DDV(Direct Drive Valve)servo actuator[J].Journal of Northwestern Polytechnical University,2006,24(3):308-312.(in Chinese)
[10]王大彧,郭宏,于凯平,等.基于FPGA的直接驱动阀用音圈电机功率驱动器[J].北京航空航天大学学报,2010,36(8):954-956.WANG Dayu,GUO Hong,YU Kaiping,et al.FPGA-based power drive device for voice coil motor used in Direct Drive Valve[J].Journal of Beijing University of Aeronautics and Astronautics,2010,36(8):954-956.(in Chinese)
[11]蔚永强,郭宏,谢占明.冗余直接驱动阀系统的余度控制策略[J].北京航空航天大学学报,2008,34(8):869-872.YU Yongqiang,GUO Hong,XIE Zhanming.Redundancy control of Direct-Drive-Valve servo system [J].Journal of Beijing University of Aeronautics and Astronautics,2008,34(8):869-872.(in Chinese)
[12]王大彧,郭宏,刘治,等.直驱阀用音圈电机的模糊非线性PID控制[J].电工技术学报,2011,26(3):52-56.WANG Dayu,GUO Hong,LIU Zhi,et al.A fuzzy nonlinear PID control of voice coil motor used in Direct Drive Valve[J].Transactions of China Electrotechnical Society,2011,26(3):52-56.(in Chinese)
[13]夏立群,牛世勇.直接驱动阀的阀芯摩擦力自适应补偿研究[J].系统仿真学报,2008,20(12):3327-3335.XIA Liqun,NIU Shiyong.Research of adaptive friction compensation for Direct Drive Valve [J].Journal of System Simulation,2008,20(12):3327-3335.(in Chinese)
[14]黄智,郭宏,王大彧,等.无刷直流力矩电动机双闭环控制策略仿真分析[J].北京航空航天大学学报.2011,37(1):72-75.HUANG Zhi,GUO Hong,WANG Dayu,et al.Smiulation and analysis of brushless DC motor double closed-loop control strategy[J].Journal of Beijing University of Aeronautics and Astronautics,2011,37(1):72-75.(in Chinese)
[15]肖然,周明,郝守刚.有限转角直流力矩电机位置伺服驱动器设计[J].微电机,2008,41(1):37-42.XIAO Ran,ZHOU Ming,HAO Shougang.Design of position servo driver for DC limited angle torque motor[J].Micromotors Servo Technique,2008,41(1):37-42.(in Chinese)
Design and Verification of Direct Drive Valve Control System
ZHANG Yu,CHEN Ke,WANG Shao-yong,LI Hua-zhong,PENG Guo-hua,LUO Xing
(AECC Aero Engine Control System Institute,Wuxi Jiangsu 214063,China)
In order to improve the dynamic characteristic and stability margin of the direct drive valve system,a double-loop control system of Direct Driver Valve which include a position control loop and a current control loop was designed.The position control loop was designed into controller which composed a PI controller and a lead correction link,and the current loop controller was designed into a PI controller.A simulation work of the current loop was carried out in MATLAB,and so did the model identification and the simulation work of the position loop.A verification experiment was carried out in a DSP and FPGA based on experimental platform,both the current loop controller and the position loop controller can obtain similar performance with simulation.The current loop can obtain a wide bandwidth up to 400 Hz,and the position loop bandwidth can be up to 25 Hz.The results show that the design and the correction method can improve the dynamic characteristics and stability margin of the DDV system obviously.
Direct Drive Valve;lead correction;model identification;double loop control;aeroengine
V 233.7
A
1 0.1 3477/j.cnki.aeroengine.201 7.02.007
2016-03-08 基金项目:国家重大基础研究项目资助
张宇(1990),男,硕士,从事航空发动机伺服控制技术研究工作:E-mail:yuzh_cpld@163.com。
张宇,陈珂,王少永,等.直驱阀控制系统设计及验证[J].航空发动机,2017,43(2):36-40.ZHANG Yu,CHEN Ke,WANG Shaoyong,etal.Design and verification ofDirectDrive Valve controlsystem[J].Aeroengine,2017,43(2):36-40.
(编辑:张宝玲)
