涡扇发动机气路传感器故障诊断
2017-11-09姚文荣徐田镇张海波
姚文荣,徐田镇,张海波
(1.中国航发控制系统研究所,江苏无锡214063;2.南京航空航天大学江苏省航空动力系统重点实验室,南京210016)
涡扇发动机气路传感器故障诊断
姚文荣1,徐田镇2,张海波2
(1.中国航发控制系统研究所,江苏无锡214063;2.南京航空航天大学江苏省航空动力系统重点实验室,南京210016)
为了实现对某涡扇发动机传感器故障的在线诊断,提出并设计了1种基于在线贯序极端学习机的故障诊断算法。其核心思想是在定位某传感器故障后,在线建立针对该故障传感器“预学习”的信号重构算法,解决多故障混叠问题。在线信号重构算法以泛化能力指标为判定条件,利用选择策略对算法网络权值进行选择性更新,提高了故障诊断系统的实时性。以某型涡扇发动机为对象开展了传感器故障诊断与重构仿真,结果表明:该算法能够对发动机单、双传感器故障进行准确地诊断与信号重构,且具有良好的实时性。
在线贯序极端学习机;涡扇发动机;传感器;故障隔离;故障诊断;信号重构
0 引言
众所周知,传感器的可靠性对航空发动机控制系统具有至关重要的影响。发动机数控系统中传感器大都在高温、高压、强振动的恶劣环境中工作,容易发生各种故障。为此,常采用传感器余度技术,应用最广泛的余度技术主要有硬件余度和解析余度[1-2]。硬件余度技术采用多个传感器测量同一发动机参数的方法来保证测量值的可靠性,但该技术会增加系统的复杂性和质量,对于某些发动机参数,常常由于传感器安装困难而无法实现,因而限制了其应用范围。解析余度技术利用各测量参数的解析关系,通过软件算法在线估计出某些发动机参数的值,当对应的参数传感器发生故障时,即可将估计值作为余度信息代替传感器测量值[3]。显然,随着智能算法等现代软件计算技术的快速发展,相比硬件余度技术,解析余度技术更适宜于工程化,具有更重要的研究价值。
早在20世纪70年代,Wallhagen等[4]首先提出利用传感器解析余度技术来提高发动机控制系统的可靠性;80年代开始,美国NASA Levis研究中心围绕传感器故障诊断、隔离与重构开展了ADIA(Advanced Detection Isolation and Accommodation)的研究计划,并且在F110发动机上成功进行了全包线验证[5];90年代后期,Mattern、Hieu等[6-7]将在线的机器学习算法应用到传感器故障诊断中,取得了显著成效。而国内的研究,则大多处于理论仿真研究阶段,黄向华等[8]提出基于自联想神经网络的发动机传感器的故障诊断与重构方案;刘小雄等[9]基于径向神经网络提出1种智能解析余度的容错飞行控制方法;鲁峰等[10]提出了1种改进的粒子群算法训练的支持向量机,并利用融合机制将其应用于传感器的故障诊断中。上述方法可归为离线设计的方法,即通过事先获取的数据集进行故障诊断系统设计,受数据获取的难度和智能算法泛化能力的限制,目前的研究结果仅适用于发动机某些特定的工作状态。
近年来,传感器在线故障诊断算法也开始兴起。如赵永平等[11-12]提出了在线学习算法OPLS-SVR(Online Parsimonious least support vector regression)进行了传感器故障诊断;赵成伟等[17]基于1簇卡尔曼滤波器的算法也对传感器故障进行了快速实时仿真。但由于实时性的限制,上述在线方法仅对单个传感器故障进行了在线仿真研究。
为了适应实际发动机复杂的运行工况,针对常见的多传感器故障、不同故障类型交错发生的情况,本文提出并设计了1种基于在线贯序极端学习机(Online Sequential Extreme Learning Machine,OS-ELM)的传感器在线诊断算法,并且设计了某涡扇发动机传感器的故障隔离系统。其核心是在诊断出某一传感器故障之后,对该故障传感器建立1种“预学习”的信号重构,应用此故障隔离算法,在多个传感器连续发生故障时,也能够实时、准确地定位故障传感器,并能重构各传感器信号。
1 在线贯序极端学习机算法
极端学习机(ELM)算法是1种简单易用、有效的单隐含层前馈神经网络(SLFNS)[14]。相对于传统的网络算法,ELM法极大地提高了训练速度,并能有效避免过拟合现象[16]。为了获得在线学习的能力,文献[15]提出了1种在线贯序极端学习机(OS-ELM)算法。
1.1 OS-ELM算法
式中:βi=[βi1,K,βim]T,为隐含层第 i点和输出层节式点的连接权值;wi=[wi1,wi2,K,win],为隐含层第i点与输入层节点的连接权值;bi为隐含层第i点的偏置。
对式(1)中的N个方程可以写为如下矩阵形式
式中:H为ELM网络的输出层矩阵,H的第i列是相对于输入x1,K,xN的第i个隐含层节点的输出向量。
根据文献[14],当选定的激活函数g(x)无限可微,SLFN的参数不需要全部调整,w和b在初始化过程中可以任意给1个随机值,并且在此后的运算过程中保持数值不变,只需求解神经网络隐含层与输出层之间的连接权值β,因此大大提高了算法的运算速度。
β由求逆定理[15]解
式中:H†为神经网络输出层矩阵H的广义逆。
对于OS-ELM算法,即是利用前一步计算的网络权值,通过递推的方式来更新当前网络权值[15],βk表示第k组输入数据所对应的输出权值矩阵,hk表示第k组输入数据所对应的输出层矩阵,则k+1组数据所对应的权值矩阵为
1.2 选择策略
为了提高故障诊断系统的实时性,本文采用选择策略[16],其工作原理是根据下式的判断条件对Mk进行选择更新
式中:e=|(dk+1-dk+1)/dk+1|,为算法的预测值与发动机真实值之间的相对误差;ε为更新判定阈值。
当e<ε时,说明当前采样步长内数据的预测精度较高,算法原系统具有足够的泛化能力来精确预测当前输出值,因此没有必要对Mk进行递推更新,否则根据式(5)更新当前的Mk+1,并且计算相应的权值矩阵βk+1。
2 发动机传感器的故障类型及其模拟仿真
发动机传感器最常见的故障是偏置、漂移2种类型,为了进行仿真研究,需要先对故障信号进行模拟。传感器发生偏置故障时,其时域特征为传感器在某一时刻测量值突然发生较大的幅值偏差。可由下式模拟偏置故障信号
式中:d(k)为k时刻传感器的实际测量值;dr(k)为k时刻发动机参数的真实值;t0为发生故障的时刻;n为偏置百分率。
传感器在某一时刻发生漂移故障时,表现为传感器的测量值随着时间以某一速率缓慢偏离对应发动机参数的真实值,漂移故障信号的模拟方式为
式中:m为采样步长时间内故障漂移速率。
另外,为了使每个传感器在诊断过程中有相同的权重,对不同参数的测量值根据式(9)进行归一化处理
式中:dn(k)为k时刻传感器测量值信号处理后的值;dmax和dmin分别为传感器信号的最大值和最小值。
3 基于OS-ELM的某涡扇发动机的传感器故障诊断系统设计
根据上述的OS-ELM法,针对某涡扇发动机控制系统传感器故障诊断问题进行研究。
3.1 涡扇发动机
本文研究对象为某小涵道比涡扇发动机,发动机控制输入为主燃油流量Wf以及尾喷管面积A8,闭环运行定义油门杆角度为PLA。
涡扇发动机轴向结构如图1所示。1截面为发动机进口,2截面为风扇进口,22截面为风扇出口,13截面为外涵道进口,23截面为内涵道进口,25截面为压气机进口,3截面为压气机出口,4截面为燃烧室出口,42截面为高压涡轮出口,45截面为低压涡轮进口,46截面为低压涡轮出口,16和6截面分别为外涵道和内涵道出口,7截面为加力燃烧室进口,75截面为加力燃烧室出口,8截面为尾喷管喉道,9截面为尾喷管出口。
为便于说明,分别对涡扇发动机控制系统5个主要传感器编号1~5,对应的测量值分别为风扇转速N1,压气机转速N2,压气机出口总温T3,压气机出口总压P3,低压涡轮出口总温T46。
3.2 故障诊断系统结构设计
为了充分利用传感器的测量值,改善传感器映射模块的动态预测精度,考虑到发动机动态可以简化为1个2阶数学系统,因此所设计的故障诊断系统中,传感器信号均引入前2个时刻的测量值作为系统输入,可描述为
对于1~5号传感器分别设计基于OS-ELM法的诊断系统,其结构如图2所示。
当ei<DC时,传感器正常工作,直接输出传感器所测量信号值dik;当 DC≤ei<FC时,则传感器诊断系统诊断为漂移故障;当ei≥FC时,则诊断系统诊断为偏置故障;传感器发生故障后,诊断系统将其映射模型的重构值代替测量信号作为输出。
而对于多传感器故障,基于上述的诊断系统,定位某一传感器发生故障后,若将此测量信号继续作为映射模块的输入易引起误诊,从而导致整个诊断系统出现混乱甚至崩溃。
针对上述问题,对多传感器故障信号设计了隔离系统,其诊断流程如图3所示。其中,传感器未发生故障时的映射系统记作诊断系统A。发生故障的传感器信号从映射模型的输入中剔除,用剩余健康传感器信号作为输入重新训练预测模型,记作诊断系统B。
当传感器再次发生故障时,将该传感器继续从映射模块输入中剔除,用剩余健康传感器信号作为输入重新训练预测模型,记作诊断系统C。对于所剔除故障传感器信号的重构,采用本文所提出的“预学习”诊断系统。
以下详细说明基于OS-ELM法传感器故障诊断系统的故障隔离的工作原理,不失一般性,仅以1、2号传感器发生单、双故障的情形为例。
3.3 单传感器故障诊断系统的隔离逻辑
当各传感器正常工作时,其OS-ELM映射模型的输入-输出关系见表1,即故障诊断系统A。

表1 诊断系统A对应的输入-输出关系
当1号传感器单独发生故障时,将其测量值与其预测值进行比较,根据图2的诊断逻辑置故障标志位。而后,在其它传感器预测模型中将1号故障传感器的测量值从模型的输入中剔除,重新进行在线训练。1号故障传感器的估计沿用诊断系统A中相应的输入,此时每个传感器的映射模型中都不含有故障传感器1的信息,可以实现发动机控制系统在传感器发生故障后,仍然能够正常工作。故障诊断系统B中,映射模型具体的输入对应关系见表2。

表2 诊断系统B对应的输入-输出关系
3.4 多传感器故障诊断系统的隔离逻辑
如前所述,在线传感器故障诊断系统多针对单个传感器故障进行设计研究,而实际上,多个不同传感器发生故障或是不同故障类型交错发生的情况也是常见的。
为了避免在多个传感器发生故障时引起误诊,在诊断出单传感器(假设为1号传感器)故障后,对1号传感器的信号重构进行“预学习”。由于当前时刻下次发生故障的传感器未知,因此需预先去除可能发生故障的每个传感器测量值,分别建立映射模型,并行地预测第1次发生故障的1号传感器。具体的预学习映射模型的输入-输出对应关系见表3。

表3 预学习系统对应的输入-输出关系
当其它传感器发生叠加故障,假设为2号传感器发生故障。显然,通过故障诊断系统B,可以定位2号传感器故障,此时应选择“预学习”模型中不包含故障传感器2的1组,对1号故障传感器进行预测。其它传感器预测模型中将1、2号故障传感器的测量值从模型的输入中去除,重新进行在线训练,实现对3~5号传感器参数的预测。对2号故障传感器的预测仍延用诊断系统B中相应的输入,最终诊断系统C中各传感器映射模型的输入-输出对应关系,见表4。

表4 诊断系统C对应的输入-输出关系
通过以上设计的故障隔离系统,在多传感器发生故障的情况下,均能够将映射模型中的故障传感器信号从输入信息中剔除,保障了所设计的故障诊断系统的鲁棒性、降低了误诊率。
类似地,其它传感器故障均可以按照相同的故障隔离逻辑实现多个故障传感器的诊断与信号的预测重构。
4 数字仿真验证
以前述涡扇发动机为研究对象,在地面标准状态下,发动机油门杆角度PLA,在第5 s时由30°变化到70°,在第20 s时由70°变化到30°,在第35 s时由30°变化到70°。针对传感器发生偏置或漂移故障情况进行仿真分析,其他包线点的结果类似,限于篇幅不再给出仿真图。设置OS-ELM法隐含层激励函数sigmoid,节点数设置为50,图中的纵坐标是经式(9)处理后的结果。
4.1 单传感器故障在线诊断
模拟发动机在过渡态运行过程中,对T3传感器发生偏置或漂移故障的情况进行仿真分析。
发动机在第35~40 s过渡态运行过程中,T3传感器发生偏置故障时的仿真结果如图4(a)所示,其中传感器的偏置故障幅度为3.5%。图4(a)的局部放大如图4(b)所示。从图中可见,当T3传感器发生偏置故障时,传感器测量值偏离其真实值,此时诊断系统的输出值并没有跟随故障传感器的测量值,而是等于映射模块的预测值,最大相对误差为1.95%。
T3传感器发生漂移故障时的仿真结果如图5(a)所示。其中漂移速率为每个采样周期20 ms内负向漂移0.04%,持续时间为1 s。图5(a)的局部放大如图5(b)所示。当第35.0~35.8 s传感器发生漂移故障时,由于没有超过判定阈值,并未被诊断出故障,诊断系统的输出值跟随了故障传感器的测量值,当漂移故障幅度超过判定阈值时,诊断系统的输出值等于其预测值,最大相对误差为3.72%。其他传感器的诊断结果见表5。
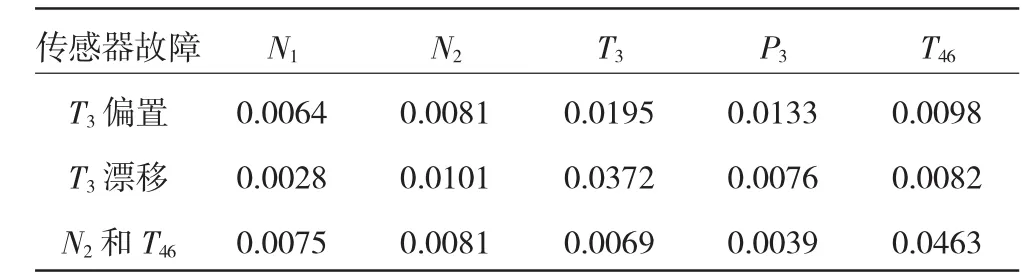
表5 地面状态下传感器诊断的最大相对误差
4.2 双传感器故障在线诊断
模拟T46传感器与N2传感器同时发生故障的情况,其中在发动机过渡态运行过程中发生T46传感器漂移故障,在发动机稳态过程叠加N2传感器偏置故障。其故障偏置幅度、漂移速率及持续时间与前同。
在t=37 s处发动机处于过渡态时,T46传感器发生漂移故障时的仿真结果如图6(a)所示。其结果与图5(b)基本一致,经故障诊断系统后,其输出值并没有再跟随T46传感器的测量值,而是替代为映射模块输出的预测值。
为模拟叠加故障,在第42 s处开始模拟N2传感器偏置故障,如图6(b)所示。从图中同样可见,诊断系统的输出值没有再跟随故障传感器的测量值,而是很好地跟踪了其真实值,最大相对误差为2.81%。且从图6(a)中还可见,在对N2传感器偏置故障进行重构时,T46传感器重构没有受到影响。
为了验证多故障隔离系统的有效性,在相同条件下,将诊断系统的故障隔离系统去除,在第42 s处发生混叠故障时,诊断系统输出结果相较于真实值产生了大的偏离,如图7(a)所示。从图中可见,此时N1没有发生故障,由于映射模块的输入中有故障信号,导致其重构预测的信号值出现错误,此时系统输出值并不是健康传感器的测量信号,而是错误的预测值,导致诊断系统发生误诊。故障传感器T46的诊断结果如图7(b)所示。从图中可见,诊断系统的输出值并没有跟随发动机的真实值,最大相对误差超过20%。说明所设计诊断系统中基于”预学习”思想的故障隔离逻辑能有效解决多故障混叠发生的情况,避免了误诊,且保持了较高的预测精度。
从图4~6中明显可见,无论是单传感器故障还是双传感器故障,该系统均能迅速定位故障传感器,并且隔离故障传感器测量信号,诊断系统的输出值没有跟随发生故障的传感器测量值,而是精确反映了涡扇发动机对应参数的真实值。
4.3 不同传感器故障包线适应性测试
类似地还给出在地面状态下其它传感器故障诊断的结果(表5)。为了验证发动机诊断系统的包线适应性,在H=7 km、Ma=0.6,针对P3传感器漂移故障或偏置故障,N1和N2同时发生漂移故障和偏置故障进行了仿真验证,系统诊断最大相对误差见表6。从表5、6中可见传感器诊断的输出值与真实值的最大相对误差控制在5%以内。
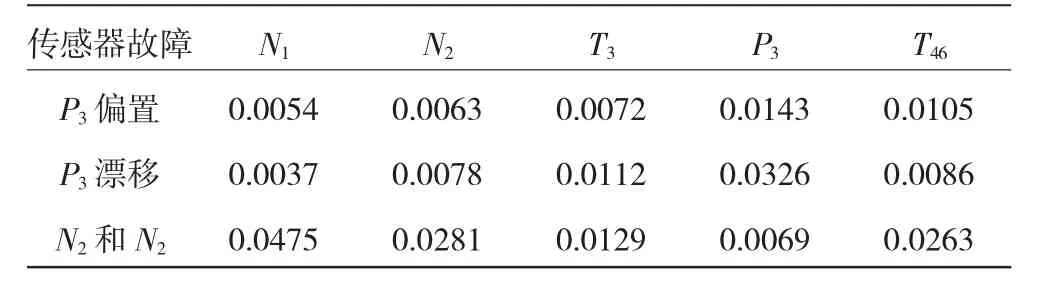
表6 高空状态下传感器诊断的最大相对误差
4.4 算法实时性测试
上述仿真试验均在VC++6.0环境下完成,计算电脑主频为3.30 GHz,内存为3.46 GB。采用选择策略的映射模块平均预测时间为0.8302 ms,由于通过选择策略对输出层权值进行了选择性的更新,使得OS-ELM算法在实时性上有了明显改善,更适用于传感器故障的在线诊断。
5 结论
(1)基于OS-ELM法建立的在线故障诊断系统具有良好的预测精度,对传感器信号的重构精度在98%以上。
(2)采用“预学习”思想所建立的故障隔离系统,对单传感器以及多传感器的故障均具有良好的诊断能力,诊断系统的输出误差在5%以内。
(3)以泛化能力为指标,采用选择策略对OS-ELM法的输出权值进行选择性更新,提高了其在线使用的实时性,其预测时间在1 ms以内。
[1]Garg S.Controls and health management technologies for intelligent aerospace propulsion systems[R].AIAA-2004-0949.
[2]Delaat John C,Merrill Walter C.Advanced detection,isolation,and accommodation of sensor failures in turbofan engines[R].NASA-TP-2925,1990.
[3]张娅玲,陈伟民,章鹏,等.传感器故障诊断技术概述[J].传感器与微系统,2009,28(1):4-6.ZHANG Yaling,CHEN Weimin,ZHANG Peng,et al.Overview on sensor fault diagnosis technology[J].Transducer and Microsystem Technologies,2009,28(1):4-6.(in Chinese)
[4]Wallhagen R E,Arpasi D J.Self-teaching digital-computer program for fail-operational control of a turbojet engine in a sea-level test stand[R].NASA-TM-X-3043,1974.
[5]Alag G,Gilyard G.A proposed kalman filter algorithm for estimation of unmeasured output variables for an F100 turbofan engine[R].AIAA-90-1920.
[6]Mattern D L,Jaw L C,Guo T H,et al.Using neural networks for sensor validation[R].AIAA-98-3547.
[7]Hieu Trung Huynh,Yonggwan Won.Regularized online sequential learning algorithm for single-hidden layer feedforward neural networks[J].Pattern Recognition Letters,2011,32:1930-1935.
[8]黄向华,孙建国.基于自联想网络的发动机传感器解析余度技术[J].航空动力学报,1999,14(4):433-436.HUANG Xianghua,SUN Jianguo.Analytical redundancy based on auto-associative neural network for aeroengine sensors[J].Journal of Aerospace Power,1999,14(4):433-436.(in Chinese)
[9]刘小雄,章卫国,李广文.基于智能解析余度的容错飞行控制系统设计[J].传感技术学报,2007,20(8):1912-1916.LIU Xiaoxiong,ZHANG Weiguo,LI Guangwen.Intelligence analytical redundancy-based fault-tolerance design for flight control system[J].Chinese Journal of Sensors and Actuators,2007,20(8):1912-1916.(in Chinese)
[10]鲁峰,黄金泉,陈煜,等.基于SPSO-SVR的融合航空发动机传感器诊断[J].航空动力学报,2009,24(8):1856-1865.LU Feng,HUANG Jinquan,CHEN Yu,et al.Research on sensor fault diagnosis of aeroengine based on data fusion of SPSO-SVR[J].Journal of Aerospace Power,2009,24(8):1856-1865.(in Chinese)
[11]Zhao Yongping,SUN Jianguo.Fast online application for hard support vector regression and its application to analytical redundancy for aeroengines[J].Journal of Aeronautics,2010,23:145-152.
[12]Zhao Yongping,Sun Jianguo,Wang Jiankang.Online parsimonious least squares support vector regression and its application[J].Transactions of Nanjing University of Aeronautics&Astronautics,2009,26(4):280-287.
[13]张贤达.矩阵分析与应用[M].北京:清华大学出版社,2004:68-69.ZHANG Xianda.Matrix analysis and applications[M].Beijing:Tsinghua University Press,2004:68-69.(in Chinese)
[14]Huang G B,Zhu Q Y,Siew C K.Extreme learning machine:theory and applications[J].Neurocomputing,2006,70(1):489-501.
[15]Huang G B,Liang N Y,Rong H J,et al.Online sequential extreme learning machine [J].ComputationalIntelligence,2005,128(5):232-237.
[16]李业波.智能航空发动机性能退化缓解控制技术研究[D].南京:南京航空航天大学,2014.LI Yebo.Research on intelligent aeroengine performance deterioration mitigating control[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2014.(in Chinese)
[17]赵成伟,叶志峰,王继强,等.涡扇发动机传感器故障诊断的快速原型实时仿真[J]航空动力学报,2014,29(2):451-457.ZHAO Chengwei,YE Zhifeng,WANG Jiqiang,et al.Rapid prototype real-time simulation of turbofan engine sensor fault diagnosis[J].Journal of Aerospace Power,2014,29(2):451-457.(in Chinese)
Fault Diagnosis of Gas Path Sonsor for Turbofan Engine
YAO Wen-rong1,XU Tian-zhen2,ZHANG Hai-bo2
(1 China Aerospace Power Control System Research Institute,Wuxi Jiangsu 214063,China;2.Jiangsu Province Key Laboratory of Aerospace Power Systems,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China)
In order to diagnose malfunctioning turbofan engines'sensor,a corresponding fault diagnosis system was designed with the Online Sequential Extreme Learning(OS-ELM)algorithm.The core idea is that after finding some malfunction sensor,a predictive learning mechanism is applied to construct fault detection and isolation for the sensor.The fault diagnosis for multiple-sensor failures can be effectively solved by this mechanism.Meanwhile,the output layer weight vector of the algorithm net is updated selectively based on generalization capability,the method could significantly improve the really-time of fault diagnosis system.Simulations on a turbofan engine show that the diagnosis method of sensor faults could detect and isolate faults of single-sensor and double-sensor failures,which also prove the validity and feasibility of the algorithm.
online sequential extreme learning;turbofan engine;sensor;fault isolation;fault diagnosis;signal reconstruction
V 235.13
A
10.13477/j.cnki.aeroengine.2017.05.010
2017-03-07
姚文荣(1981),男,博士,工程师,研究方向为航空发动机控制及故障诊断;E-mail:272231671@qq.com。
姚文荣,徐田镇,张海波.涡扇发动机气路传感器故障诊断[J].航空发动机,2017,43(5):54-61.YAO Wenrong,XU Tianzhen,ZHANG Haibo.Fault diagnosis of gas path sonsor for turbofan engine[J].Aeroengine,2017,43(5):54-61.
(编辑:李华文)