基于STC89C52的简易倒车防撞系统的设计与实现
2017-11-08刘丽华
刘丽华
(辽宁科技学院 电气与信息工程学院,辽宁 本溪 117004)
基于STC89C52的简易倒车防撞系统的设计与实现
刘丽华
(辽宁科技学院 电气与信息工程学院,辽宁 本溪 117004)
文章设计一种基于STC89C52的倒车防撞系统,以超声波手段计算距离为核心,以蜂鸣器报警为安全提醒,经过HC-SR04模块的实时测距,在实际应用中能够有效测出障碍物离车的距离,在较近的距离还可以警示驾驶员,大大减小倒车碰撞事故的发生,增加倒车的安全性,即简单又实用。
超声波;测距;防撞
汽车逐年的增加,泊车难已成为不可避免的现实问题,狭小车位的紧张无疑加剧了停车的难度,一不小心,就会造成损失。针对这种情况,设计一种响应快、可靠性高且较为经济的汽车防撞预警系统势在必行。本文利用超声波测距法设计了一种倒车防撞预警系统,用于提高泊车的安全性。
1 模块方案与硬件设计
倒车防撞系统主要由超声波传感器的发送与接收、控制系统、预警显示系统组成〔1〕。主要功能是在车挂入倒挡时,启动模块并完成相应命令,总体方案如图1。

图1 倒车防撞模块总体方案图
当障碍物与车的距离小于0.5m,蜂鸣器发出1Hz的哔哔声音,提醒驾驶员,以此作为预警功能。当测距系统测出的距离小于3m时,则将距离障碍物的数字显示在数码管上。
在测距方面,主要采用超声波发射和接收器形成的电路,超声波传感器型号选择HC-SR04,测距的范围在0.02m到3m。控制系统方面,采用STC公司的STC89C52,这块单片机性能的优越性完全满足倒车防撞装置的设计。而预警系统包括蜂鸣器和LED显示管,蜂鸣器的工作距离为0.5m,而只要测距系统收到信号,LED数码管就开始显示障碍物的距离。
超声波的发射电路和接收电路是融合在一起的,作为HC-SR04模块的集成电路,成为测距系统,而在设计软件时,需要给控制端触发一个高于10微伏的高电平以产生方波〔2〕,通过电陶瓷振子的共振,形成超声波。接收端收到反馈的超声波,输出一个脉冲给单片机,让单片机进行数据处理。发射电路和接收电路分别如图2A、2B所示。
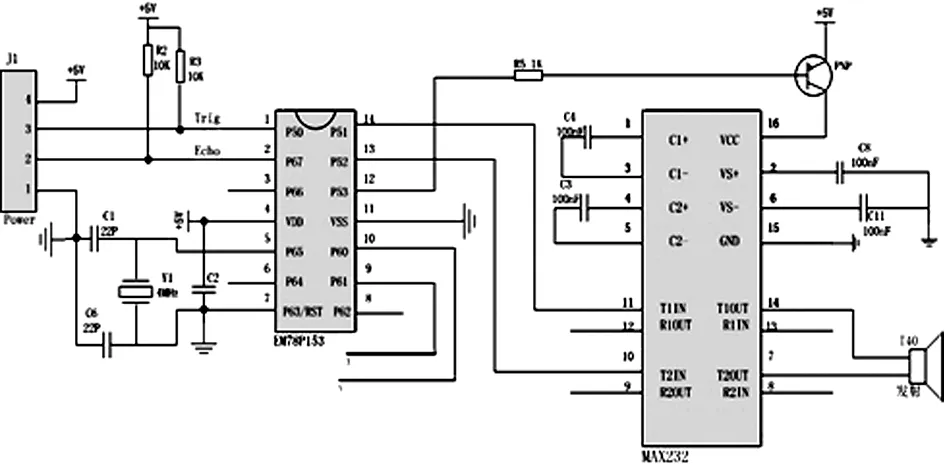
图2A 超声波发射电路
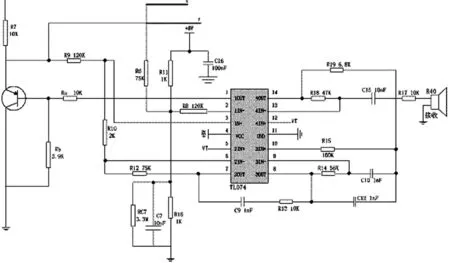
图2B 超声波接收电路
2 软件设计
软件主要完成预警距离的设置、障碍物的距离检测、计算显示等功能。软件的设计思路是以模块化的设计为主,通过对距离计算子程序,预警子程序,显示子程序,初始化子程序,定时子程序等完成。系统的程序流程图如图3所示。
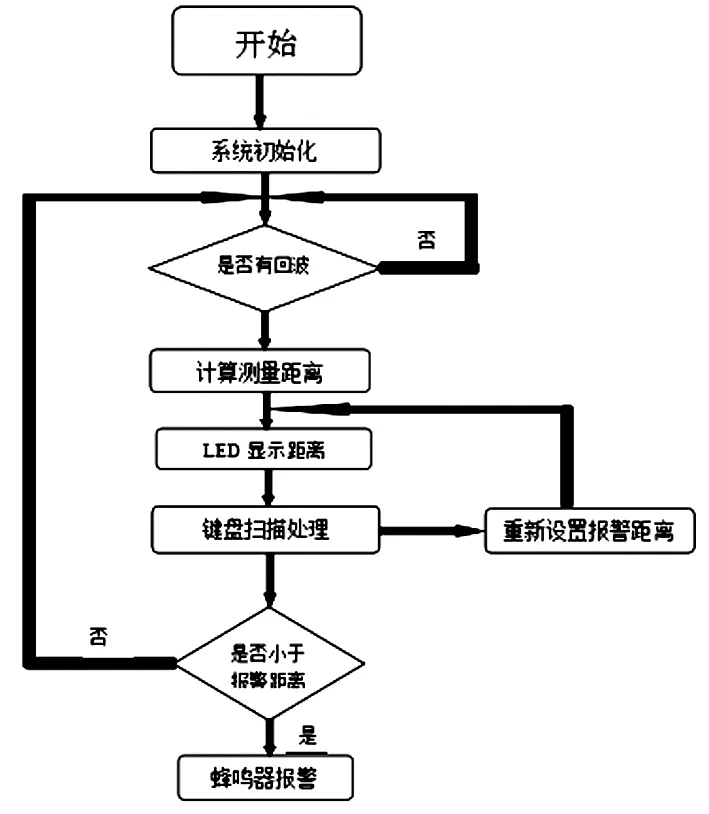
图3 软件框架图
将程序分为初始化模块、延时模块、测距模块、终端检测模块、数据处理模块和显示模块,实现的流程如图4所示。

图4 软件流程图
3 仿真测试
运用Proteus和Keil的互联,仿真得到和实际倒车防撞雷达类似的效果,如图5所示,LED数码管显示了距离,根据实时测量汽车和障碍物的距离来显示数字,图中的LED数码管显示的数字为1.53,说明汽车和障碍物的距离为153cm,如果超出了测量范围,则不会显示出数字,如图5所示。实际的超声波模块中并没有加减键,只是在模拟的时候,仿照距离障碍物的远近所添加的功能,用来代替仿真软件中没有的超声波模块。
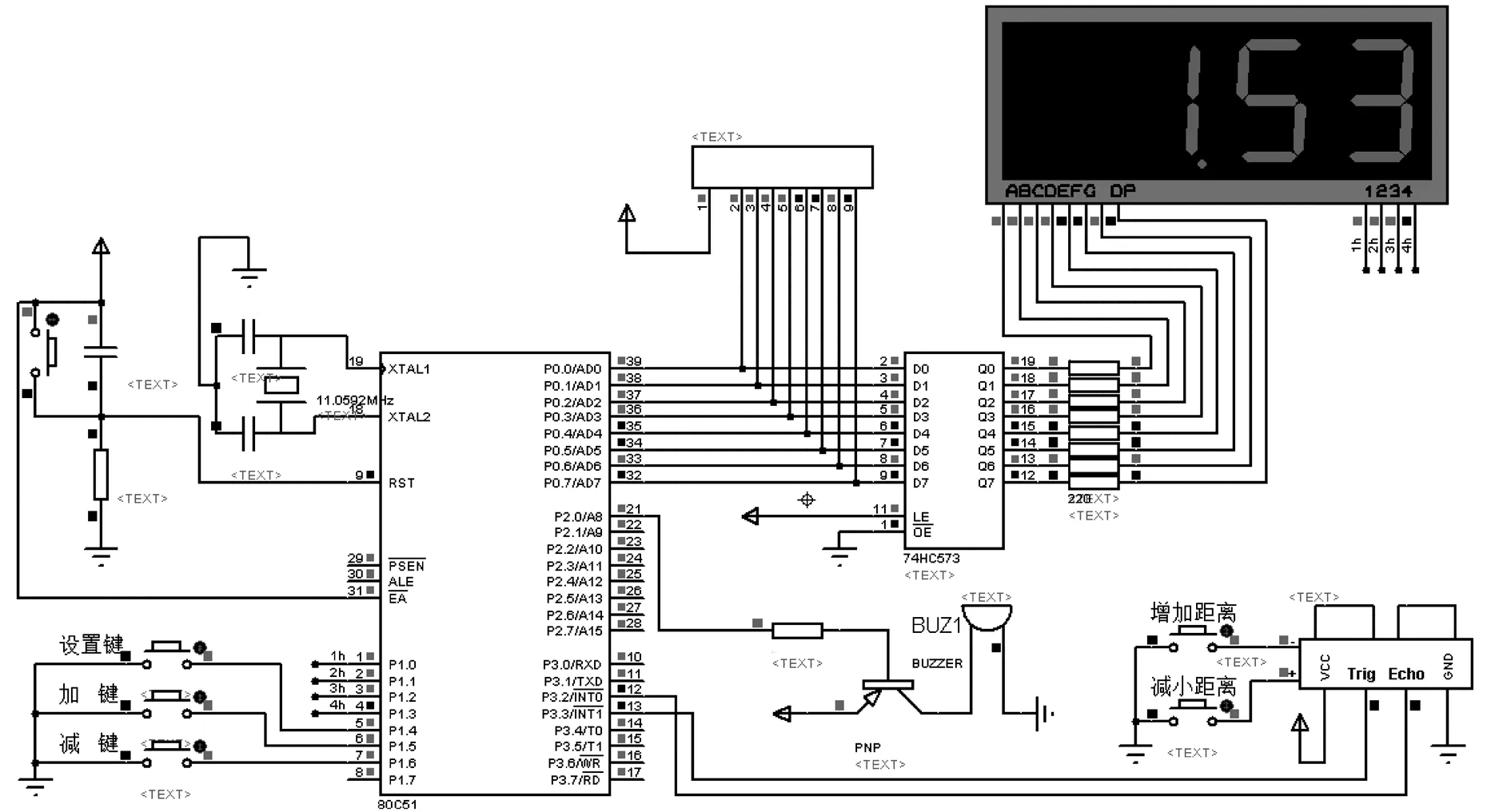
图5 车系统雷达仿真
倒车防撞系统设置了k1、k2、k3键,其中报警距离可由k1键重新设置,为了分别出汽车与障碍物距离和报警距离的区别,LED数码管显示报警距离时,第一位数显示H,而如果显示离障碍物的远近,则H不显示。如图6中的报警距离为85cm,如果摁下k2键,则报警距离变为86cm,摁下k3,变成84cm。蜂鸣器报警的情况下,小于报警距离。完全满足仿真要求。

图6 LED数码管显示
4 结论
无论从实际应用还是仿真结果来说,通过采用STC89C52为控制器的超声波测距系统,经过HC—SR04模块的实时测距,在实际的应用中,能够有效测出障碍物离车的距离,并且让驾驶员能够直接观测,在较近的距离还可以警示驾驶员。大大减小倒车碰撞事故的发生,增加了倒车的安全性。
实验结果测得在障碍物的距离在5~150cm之间,误差在3mm左右,可以忽略近似于精准的测距,可靠性强,完全可以推广运用如图7所示。
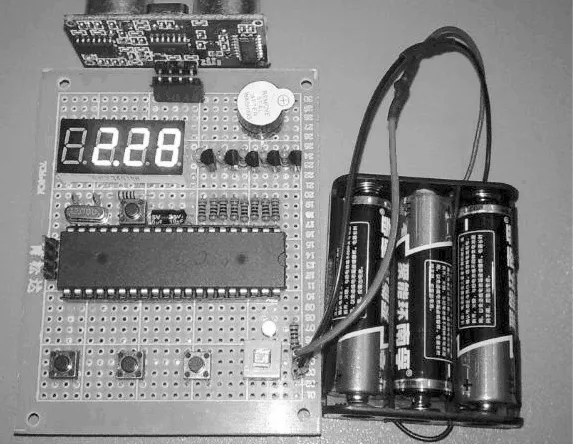
图7 STC89C52的简易倒车防撞系统
〔1〕丁鑫.全景视觉泊车辅助系统研究〔D〕.杭州:浙江大学,2014,1
〔2〕杨明发.高性价比倒车雷达的研究〔J〕.机电技术(季刊),福建省机械科学研究院.
DesignandRealizationofSimpleReverseCollisionAvoidanceSystemBasedonSTC89C52
LIU Li-hua
(LiaoningInstituteofScienceandTechnologySchoolofElectricalandInformationEngineering,LiaoningBenxi,117004)
This paper designs a reversing collision avoidance system based on STC89C52, uses the ultrasonic method to calculate the distance as the core, the buzzer alarm as the security reminder, and the real-time ranging of the HC-SR04 module can effectively measure the obstacle in the practical application The distance from the car, at the nearest distance can also alert the driver. Greatly reducing the occurrence of reversing collision accident, increase the safety of reversing that is simple and practical.
Ultrasonic wave; Ranging; Collision avoidance
2017-09-11
2016年度辽宁省社会科学规划基金项目“基于蓝牙的高端装备制造业无线通信技术研究与应用”(UPRP20140345).
刘丽华(1967-),女,辽宁本溪人,辽宁科技学院教授.研究方向:计算机网络、物联网工程.
1008-3723(2017)05-0011-02
10.3969/j.issn 1008-3723.2017.05.005
TP368
A