基于EtherCAT实时以太网技术的转台控制系统设计研究
2017-11-07李丰信光成张建成赖智华
文/李丰 信光成 张建成 赖智华
基于EtherCAT实时以太网技术的转台控制系统设计研究
文/李丰 信光成 张建成 赖智华
文章介绍了EtherCAT实时以太网技术,包括其工作原理与相关协议,分析了其技术上的先进性和优势。针对传统转台控制系统内部线缆连接繁杂,控制信号易受干扰,故障诊断能力差等缺陷,提出了一种基于EtherCAT总线技术的转台控制系统设计方案,设计采用PC机和EtherCAT主站通讯卡作为硬件平台,以VxWorks实时操作系统作为软件平台,以工业以太网网线作为控制器和驱动器间数据交互的媒介,简化了系统拓扑结构,实现了通讯的全数字化,提高了控制系统抗干扰能力和可靠性。
EtherCAT VxWorks
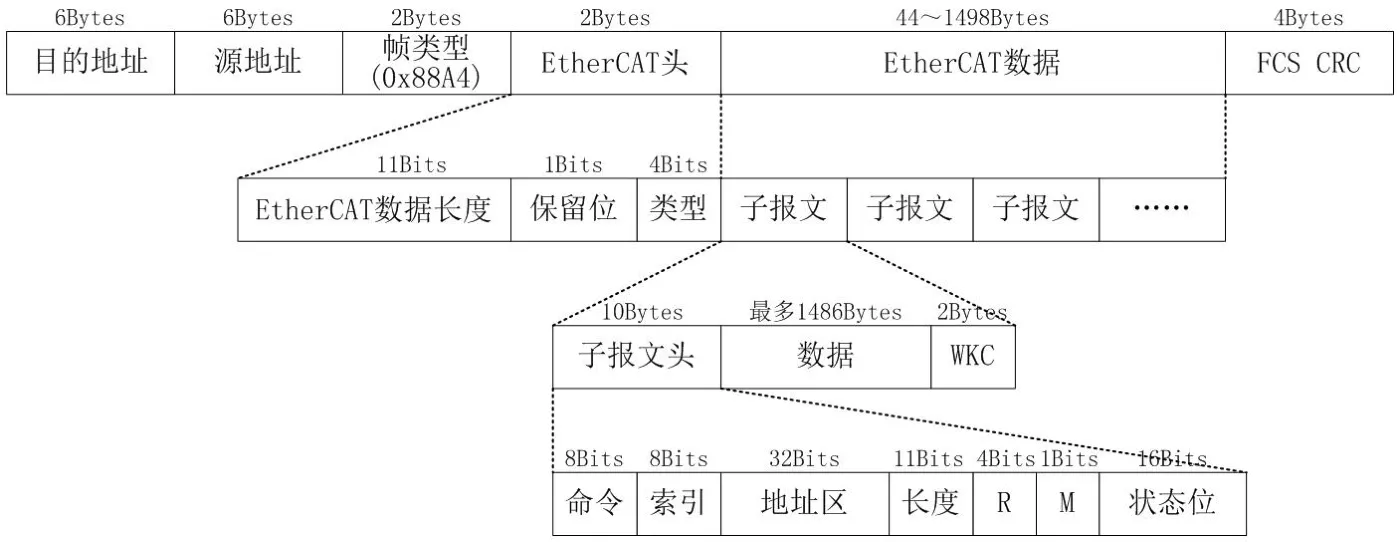
图2:EtherCAT实时以太网协议
EtherCAT (Ethernet for Control Automation Technology)是由德国自动控制公司Beckhoff开发的一种工业以太网技术,该技术以其高速、简单、易于实现正在获得越来越多的产品研发人员的关注。2003年底ETG(Ethernet Technology Group)组织成立,2007年ETG组织成立中国代表处负责EtherCAT技术的推广和宣传。截止2017年6月份ETG组织目前全球会员数已经超过4336家,其中,中国大陆会员600多家。
1 EtherCAT实时以太网技术介绍
1.1 EtherCAT实时以太网工作原理
EtherCAT采用主从站的工作模式,主站采用配有标准以太网卡或者兼容EtherCAT协 议 网 卡 的PC机,ESC(Ether CAT slave controller,从站控制器)采用专门的从站芯片。主从站通信过程示意图如图1所示,在整个EtherCAT工作流程中,主站连接n个从站,按照连接顺序,将从站命名为从站1,从站2,…,从站n,由主站发起通讯,发送数据包,数据按照从站的连接顺序,依次通过各个从站,从站根据指令在帧的相应位置插入或提取数据,当帧到达最后一个从站n后,再由从站n将处理过的完整的数据帧发回。
1.2 EtherCAT实时以太网协议
EtherCAT数据帧结构如图2所示,符合IEEE802.3标准以太网协议,帧类型为0x88A4,IP数据段由EtherCAT头和EtherCAT数据组成,而若干子报文又组成了EtherCAT数据。子报文又由子报文头、子报文数据和工作计数器WKC组成。子报文头又决定了该子报文传输到的对应从站,以及该从站对子报文进行读或写操作,在主从站通讯的过程中,16位工作计数器(WKC)的值显得尤为重要。主站发起周期控制的时候预先给定WKC一个值,当数据帧遍历完整个设备的时候,通过对比返回的WKC值,可以验证数据报文是否被EtherCAT从站节点正确处理。
2 基于EtherCAT技术的转台电控系统实现方案
2.1 转台电控系统总体方案
整个转台控制系统由基于VxWorks的X86计算机和EtherCAT主站控制卡组成。内部板卡数据交互形式为CPCI总线,主控单元和驱动器间通过EtherCAT总线进行数据传输。整个控制系统对外连接形式更简洁,控制系统对外可实现“一网到底”的互联。
如图3所示,系统以x86 CPU作为运算处理单元,运动控制算法及轨迹规划命令都通过此单元完成。系统设置EtherCAT主站控制卡的刷新周期为1ms,每个伺服周期EtherCAT主站卡可遍历各个驱动器获取实际角位置信息及驱动器工作状态参数,然后通过中断的形式通知CPU读取,CPU获取参数后进行下一周期的控制计算,然后通过CPCI总线将命令发送给EtherCAT主站卡,主站再将数据对各从站驱动器进行依次的数据刷新。
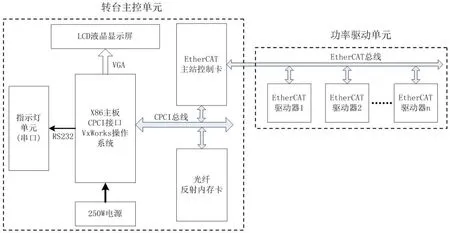
图3:基于EtherCAT技术的转台电控系统框图
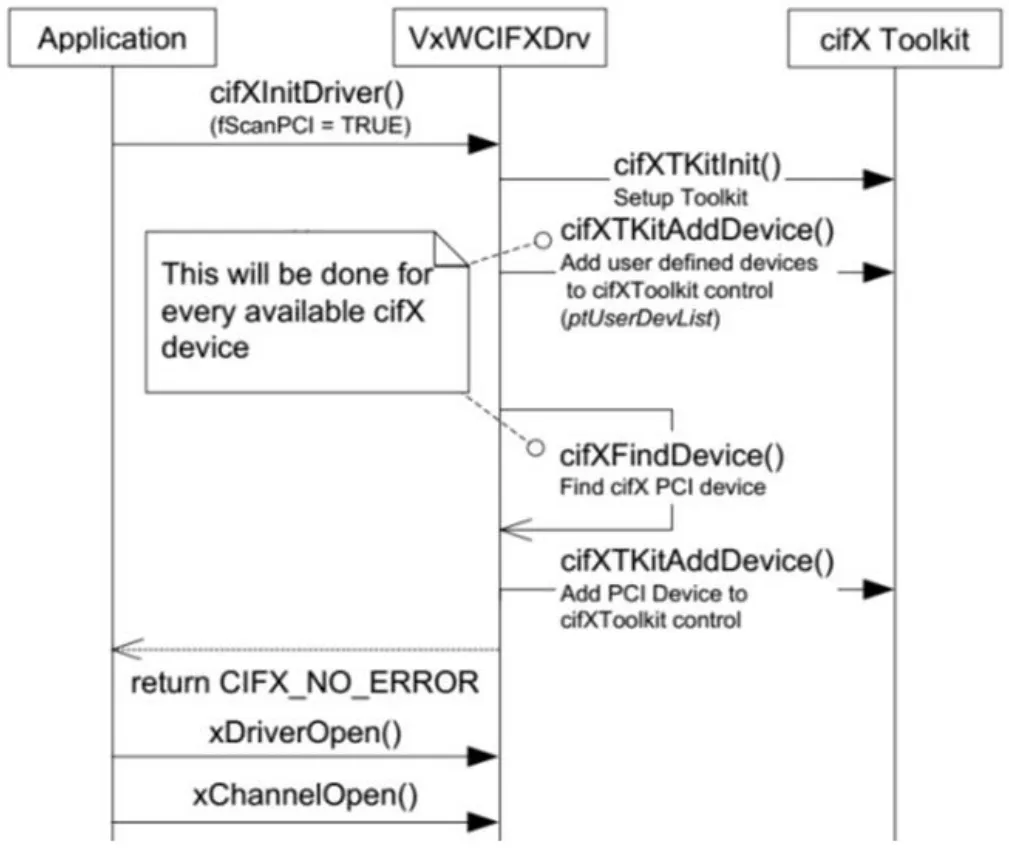
图4:CIFX 80-RE/RTEM主站控制卡初始化步骤
2.2 EtherCAT主站控制卡底层驱动调试
EtherCAT主站控制卡选用德国赫优信的CIFX 80-RE/RTEM板卡,通过CPCI总线与x86主控CPU进行数据通讯。用户只需调用特定的API函数即可实现对主站控制卡的数据收发操作,初始化主站控制卡流程如图4所示。
首先调用API函数cifXInitDriver(),此函数会扫描系统中的cifX PCI设备,若有该类型设备将下载固件和配置文件。若设备驱动初始化成功,将返回CIFX_NO_ERROR标志。然后可执行cifX驱动打开函数xDriverOpen()和通道打开函数xChannelOpen(),整个驱动初始化过程完毕。
2.3 EtherCAT主站控制卡与主控CPU数据交换实现
赫优信主站控制卡和用户应用程序通过DPM(双端口RAM)的形式进行数据交换,默认情况下数据交换与总线周期是分离的,为了实现同步数据交换功能,主站控制卡提供了一种同步握手机制。在总线周期的起始时刻主站控制卡会将上一周期计算完毕数据同步更新到各从站驱动器,同时从驱动器返回数据,然后采用发中断信号给主控CPU,主控CPU从DPM中读取数据进行计算,计算完毕后通知主站控制卡进行数据读取,整个数据交互过程和实际测试波形如图5所示。

图5:EtherCAT主站控制卡与主控CPU数据交换过程示意图
3 基于EtherCAT技术的控制系统的技术优势
传统转台控制系统多采用PC机+运动控制卡形式,如图6(a)所示,驱动器一般工作于力矩环模式,控制器每个伺服周期发送电流调节指令(一般为模拟电压或者PWM+脉冲),系统和驱动器间只是单向通讯,控制器无法获取驱动器完整的状态信息,只能通过简单的IO判断驱动器是否工作正常,且控制器到驱动器的连线较多,造成调试中诸多不便。
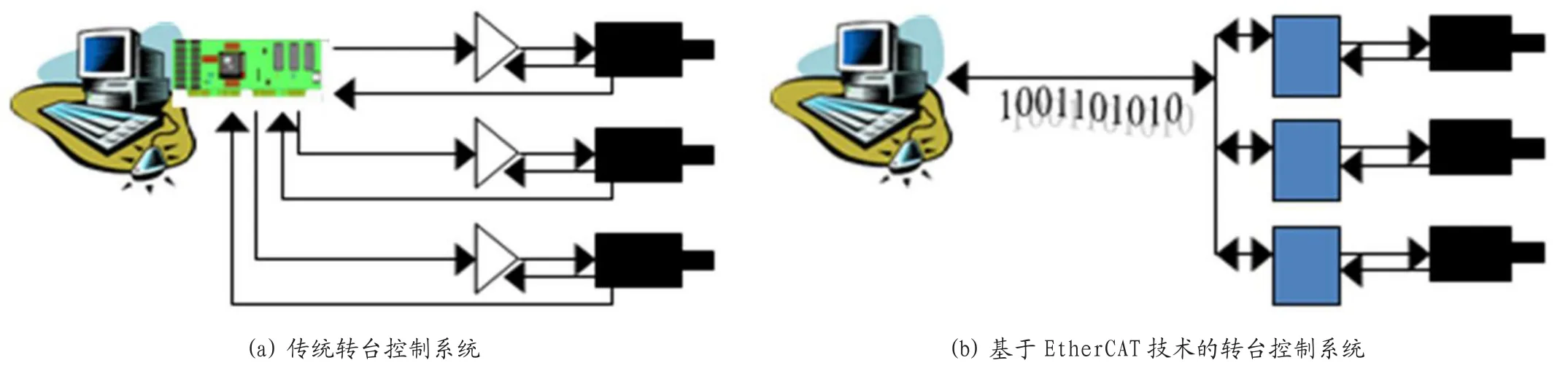
图6
基于EtherCAT技术的转台控制系统采用分布式控制方式,如图6(b)所示,控制器到驱动器均已数字指令完成传输,且通讯为双向的,可实时获取驱动器工作状态,驱动器工作于位置/速度/力矩模式,主控制器通过一根网线完成对多个驱动器的调节和控制工作,大大减少了导线互联导致的系统不稳定现象,提高了系统的可靠性。同时,由于驱动器大量信息的获取,可更准确的对各种故障进行定位,对系统故障自诊断能力有很大的提升。
4 结语
EtherCAT实时以太网技术提高了工业以太网的带宽利用效率,减小了堆栈延迟,使得通讯速度更快,完全能适应转台高速伺服系统要求。此外,EtherCAT总线还具有很强的网络的诊断能力、灵活的拓扑结构和精确的时钟同步性能,可大大简化转台电控系统的外部接线,缩短整个系统调试时间,提高整个控制系统的可靠性。
[1]王维建.工业以太网EtherCAT技术的原理及其实现[J].微计算机信息,2010,26(5-1):51-52.
[2]魏庆福.现场总线技术的发展与工业以太网综述[J].工业控制计算机,2002,15(01):1-5.
[3]谢香林.EtherCAT网络及其伺服运动控制系统研究[D].大连:大连理工大学,2008:17.
[4]杨昊佐.工业以太网EtherCAT从站设计[D].西安:西安电子科技大学,2013:21-23.
作者单位九江精密测试技术研究所 江西省九江市332000
李丰男(1986-),硕士研究生。工程师。研究方向为工业自动化控制。
