一种智能手制动控制系统的设计
2017-11-07谢子晗熊浩浩温文好邵英男
谢子晗,熊浩浩,温文好,邵英男
(辽宁工业大学 a.汽车与交通工程学院;b.文化传媒学院,辽宁 锦州 121001)
一种智能手制动控制系统的设计
谢子晗a,熊浩浩a,温文好b,邵英男a
(辽宁工业大学 a.汽车与交通工程学院;b.文化传媒学院,辽宁 锦州 121001)
介绍智能手制动控制系统总体设计模块,分析其逻辑策略,并列出控制系统电路图。智能手制动控制系统实现驻车制动的智能化,减少溜车事故的发生。
溜车;拉索式电子手制动;智能控制
随着公路的发展和车流密度的增大,交通事故数量也随之显著上升,因而对制动系统性能提出了越来越高的要求。由于驾驶员疏忽,驻车未拉手制动,造成交通事故频繁发生。因此,汽车驻车时,自动提示功能和实现汽车紧急制动,显得尤为重要。
智能手制动控制系统主要利用挡位传感器和车速传感器进行信号采集,通过ECU进行信号分析和控制,通过拉索式电子驻车系统执行驻车命令来实现智能驻车。
1 总体设计
本装置由ECU、挡位感应传感器、轮速传感器、手制动微控开关、直流电动机等组成。可分为信号采集模块、执行模块和控制模块。
信号采集模块主要由手制动微控开关、轮速传感器和挡位传感器组成,分别采集手制动拉起信息、轮速信息和挡位位置信息,将信号传递给ECU。
控制模块示意图如图1所示。通过采集手制动传感器信号、轮速传感器信号、挡位传感器信号,ECU始终处于监控状态。停车时由ECU发出控制信号,开启提示装置,监测到发生溜车时,ECU控制直流电动机正转实现紧急制动。
执行模块拉索式电子手制动结构如图2所示。拉索牵引式电子手制动的制动执行机构和传统手制动无异,同为制动蹄式,通过直流电动机的正反转控制拉索的长短,来达到与手制动相同的效果。
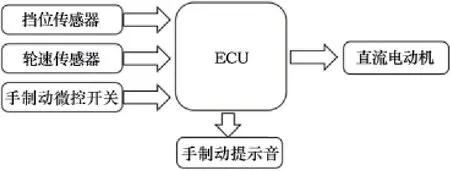
图1 控制模块示意图
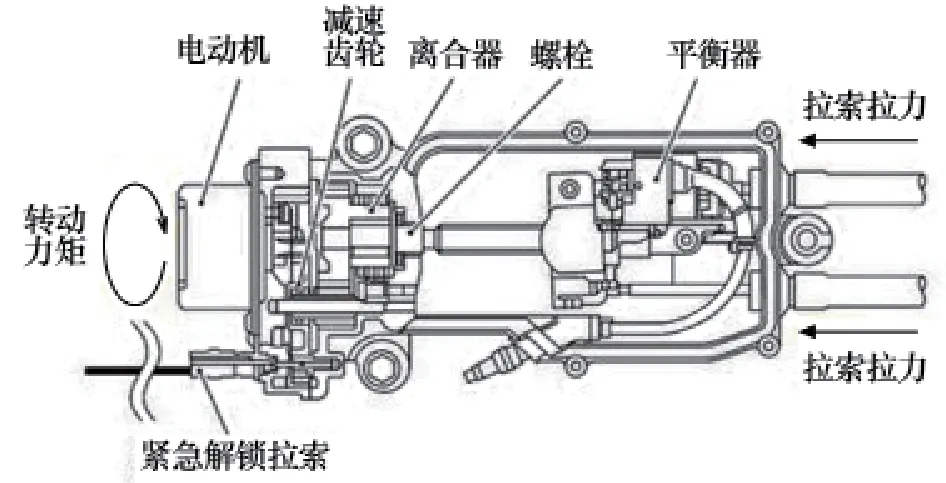
图2 拉索式电子手制动结构图
2 逻辑策略设计
智能手制动控制系统逻辑策略如图3所示。智能手制动控制系统电路图如图4所示。当车上的挡位传感器检测到汽车挡位处于空挡,且轮速传感器检测到轮速大于0时,分别将相关信号发送给ECU,ECU控制电动机正反转,以实现汽车智能制动。智能手制动控制系统的提醒功能和紧急制动功能的实现按如下逻辑进行。
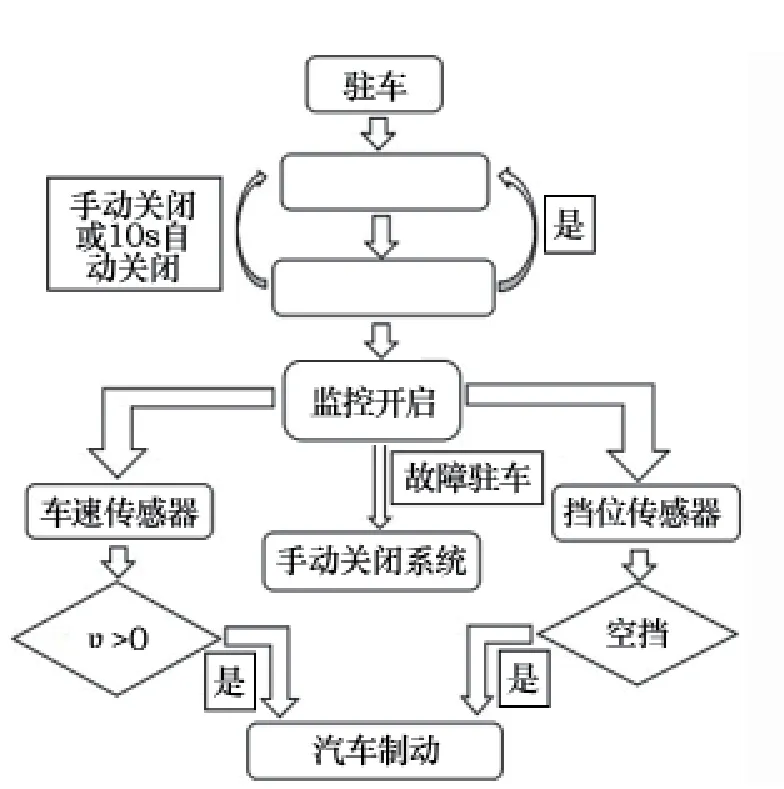
图3 控制逻辑图
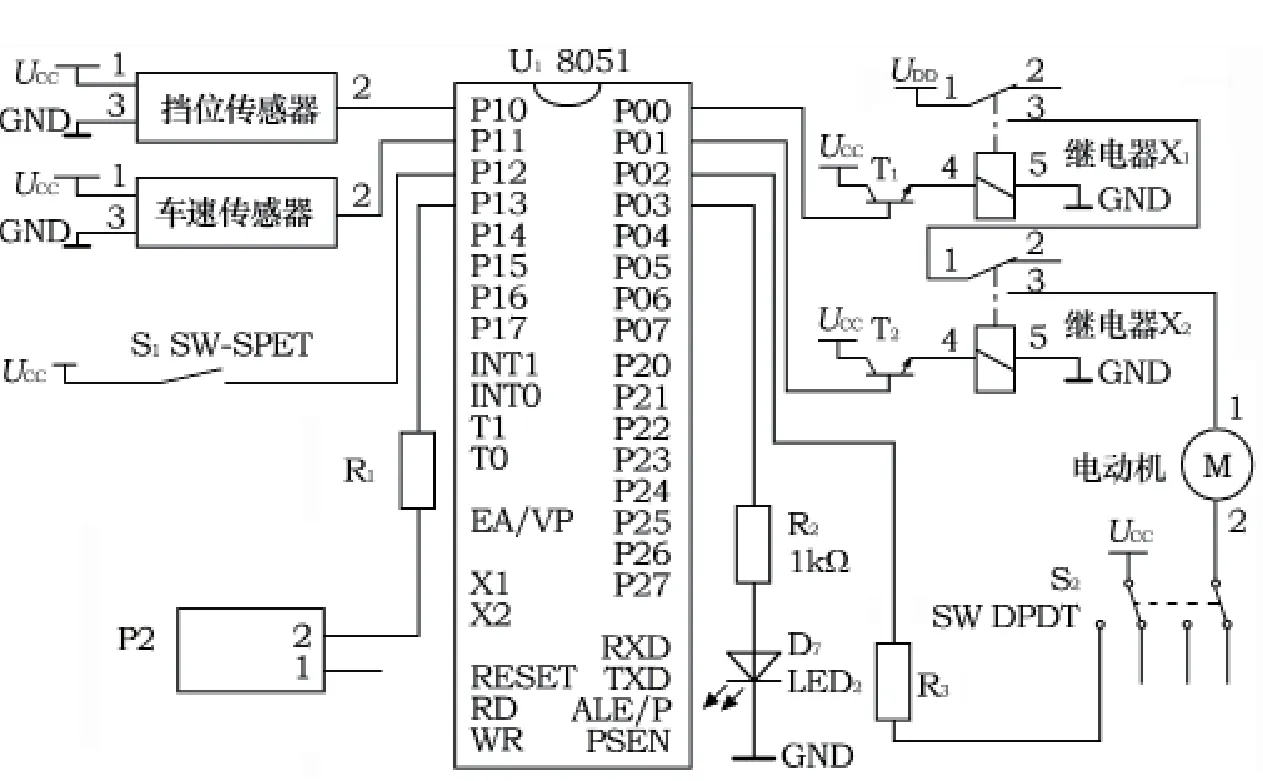
图4 智能手制动控制系统电路
2.1 汽车正常停车
1)汽车停车时,智能手制动控制系统给予驾驶员提示音提醒,驾驶员拉起手制动,提示音关闭。
2)当驾驶员停车未拉手制动且发生溜车时,控制系统的电动机迅速拉起手制动拉索,以实现紧急制动。
3)当临时驻车未拉手制动且未发生溜车时,驾驶员可以收到关闭手制动提示音,或者手制动提示音在10s后自动关闭,在此过程中智能手制动控制系统始终处于监控状态。
2.2 汽车故障停车
1)驾驶员拉起手制动时,手制动提示音关闭。
2)驾驶员手动关闭智能手制动控制系统,以使汽车能够托运和推车。通过安装在汽车点火器上的传感器,在汽车起动时系统自动重启(作用在线路总开关上),或驾驶员手动开启智能手制动控制系统。
3 结语
近年来,由于驾驶员疏忽,驻车未拉手制动,导致溜车交通事故频发,甚至造成严重的后果。智能手制动控制系统通过语音提示和紧急制动,来提高驻车的安全性,减少溜车事故的发生。该设计结构简单,控制可靠,且人性化,具有一定的推广价值。理论上可实现提示功能和溜车紧急制动功能,但对于一些极端车况和系统实际的工作效果还需要实车标定,以使该设计达到理想的效果。
(编辑 心 翔)
Design of An Intelligent Manual Parking Brake Control System
XIE Zi-hana,XIONG Hao-haoa,WEN Wen-haob,SHAO Ying-nana(a. Automobile and Transport Engineering School;
b. Arts and Media School,Liaoning University of Technology,Jinzhou 121001,China)
In this article,an intelligent manual parking brake system is introduced,with its design module,logic strategies and ECU circuit diagram. This system realizes intelligent manual control on parking brake and reduce the possibility of car slipping accidents.
car slipping;brake-by-wire EPB;intelligent control
U463.5
A
1003-8639(2017)10-0059-02
2017-01-12;
2017-01-23