无人机近距离巡检风电机组叶片应用研究
2017-11-06韩斌赵勇邓巍房刚利
文 | 韩斌,赵勇,邓巍,房刚利
无人机近距离巡检风电机组叶片应用研究
文 | 韩斌,赵勇,邓巍,房刚利
随着国内风电装机量的持续攀升,风电机组的绝对数量也随之逐年递增,叶片作为风电机组的关键部件,每年都需要定期巡检。目前常用的叶片巡检方式主要有望远镜观察、高空平台(吊篮)垂降人工巡检等,其中望远镜观察存在观测精度低的缺点,高空平台(吊篮)垂降人工巡检方式工作效率较低、成本高、工作过程中危险性高、工作强度大。
近年来随着民用无人机性能的不断提高,无人机正逐步代替人开展部分空中侦查、监控、通信、勘测、电力巡线等任务。目前,应用无人机对风电机组叶片进行检测的工作在国内外已经开展起来,2015年凯普斯基础设施公司与ING Robotic航空公司联手,利用无人机在加拿大的风电场进行叶片检测工作。工作组发现,无人机可以更快、更安全地收集数据。德国多家公司都开发了相应的无人机检测系统。国内利用无人机进行叶片巡检,尚处于一个研究试验阶段。中能公司在麒麟山风电场进行了风电机组叶片无人机检测试点应用,成功实现了6台机组叶片检测,取得良好成效。2015年国电联合动力利用无人机顺利完成了麻黄山现场MG17#风电机组叶片的巡检工作。龙源电力也开始进行相关可行性试验。根据国外经验,无人机巡检叶片比传统的高空平台(吊篮)垂降人工巡检至少快3倍,成本节约近50%,减少发电机三分之二的停机时间。
本文通过对国内市场现有无人机的调研及比较,给出了近距离(<2.5m)巡检风电机组叶片用无人机的选型原则,并从影响无人机巡检叶片效果的因素、人员配备等方面研究了无人机巡检叶片的可行性,最后总结了影响无人机近距离巡检风电机组叶片效果的不利因素,并对无人机大规模应用于叶片微观巡检时需要改进的方向提出了建议。
无人机选型
目前常见无人机有固定翼、直升机和多旋翼无人机。固定翼和直升机因有活动的机械连接部件,飞行过程中会产生磨损,导致其可靠性下降。相比而言,多旋翼无人机操控简单,可靠性也较强,而且能够悬停,飞行范围受控,相对固定翼无人机更安全。
无人机在风电领域的应用可分为风电场宏观巡检和风电机组微观巡检两类。风电场宏观巡检主要检查风电场是否有风电机组倒塔、叶片断裂、轮毂罩掉落等较大故障或事故的发生。风电机组微观(近距离)巡检主要检查风电机组叶片、机舱、塔筒表面状况、风速风向仪(机械式)是否工作等。
本文结合现有风电机组的容量、塔筒高度、风轮直径等因素,提出了无人机微观巡检风电机组叶片的选型原则及要求,具体包括:
(1)无人机能稳定悬停。
(2)无人机自带成像系统、具备高速成像及防抖功能,成像设备具有变焦功能。
(3)较强的抗风能力,至少抗5级风速。
(4)飞行高度>150m。
(5)操控简单、可靠性高。
(6)价格适中、维护方便。
通过比较各类无人机,如表1所示,可见多旋翼无人机由于具备能稳定悬停、操控简单、可靠性高、维修方便等特点,适合作为叶片巡检的工具。
本文从抗风能力、起飞重量、续航时间、成本、成像稳定性、操作难易等因素综合考虑,选用大疆Inspire 1 pro多旋翼无人机进行风电机组叶片无人机微观巡检应用研究。
影响巡检效果的因素
在无人机巡检叶片过程中,风速、湍流的突然改变会影响无人机的飞行安全,太阳光线与无人机所带成像设备间的角度会影响成像效果,环境温度会影响无人机电池性能,进而影响到无人机的续航能力,叶片在空间的位置将直接影响巡检过程。为了防止风速、湍流的突然改变造成无人机与叶片碰撞事故的发生,并确保成像设备的成像效果不受太阳光线影响,本文给出了通过调整机舱位置来确保无人机、叶片待巡测面处于最佳区域的方法。
一、考虑风向、风速、湍流时无人机所处安全区域确定方法
风向、风速、湍流大小的突然改变在风电场中是无法避免的,为此须确保无人机相对叶片所处的位置在风速、湍流突然增大时也不发生碰撞事故,因此无人机相对所巡检叶片的待观测面:迎风面(S-S面)、背风面(P-S面)、前后缘,应处于其“下风”位置。例如当用无人机观测图1中叶片A前缘、机舱头部(出现在图1所示的180°角范围内)时,无人机处于风电机组下风的位置,如果风速、湍流突然增大,无人机将被吹离叶片A的前缘,可有效避免与叶片相互碰撞;而当机舱头部出现在其他区域时,则可能导致无人机与叶片碰撞事故的发生。巡检A叶片的S-S面、P-S面、后缘时可用类似方法确定出机舱头部应调节的区域范围。
二、考虑光线对成像效果影响时叶片待巡检面所处区域确定方法
为了能充分获得叶片表面信息,尤其是S-S面的信息,利用无人机所带的成像设备对叶片进行检测,尤其是晴天时(阴天时可参考),应充分考虑光线对成像效果的影响。当有太阳光线时,为了获得清晰的图像信息,成像设备的镜头光轴与光线之间的夹角最好在0至±60之间 ,此区域属于顺光(0至±30)和前测光(±30至±60)范围,此外,镜头光轴应垂直于叶片待巡检面,由此可以确定考虑光线因素时叶片待巡检面所处的最佳区域。例如要巡检图2中A叶片的前缘时,可以通过调整机舱头部到图2所示的±60角范围内以确保叶片待观测面处于最佳区域。
图3中无人机所带镜头光轴与光线之间成90夹角观测叶片前缘时,存在阴影区域,成像效果较差。图4中无人机所带镜头光轴与光线之间成0夹角观测叶片S-S面时,成像效果较好。巡检A叶片的S-S面、P-S面、后缘时可用类似方法确定出机舱头部应调节的区域范围。
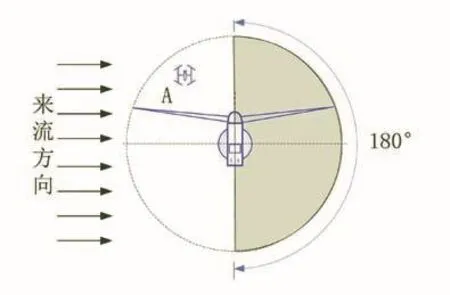
图1 考虑风向时机舱头部可调整范围

图2 考虑光线时机舱头部可调节范围

图3 叶片前缘

图4 叶片S-S面
三、考虑风向、风速、湍流、光线时机舱所处最佳区域确定方法
当综合考虑风向、风速、湍流、光线对成像效果的影响时,根据上述方法,取机舱头部所出现的公共区域范围,即可确定出机舱头部应调整的最佳区域范围。以巡检某叶片前缘以及风向与光线相对于风电机组成90°夹角时为例,当机舱头部调整到图5所示阴影区域范围内时,可同时消除风向、风速、湍流、光线等因素对巡检效果的不利影响。巡检A叶片的S-S面、P-S面、后缘时可用类似方法确定出机舱头部应调节的区域范围。
根据上文一、二确定的方法,当风向与太阳光相对于风电机组成0-±30夹角时,如图6所示,要巡检叶片A前缘,无论机舱头部调整到哪个区域,都无法同时满足安全和成像效果最佳的要求,此时如果风速较大,应本着“安全第一”的原则调整机舱头部位置。如果风速及湍流度较小或者无风,可以考虑让无人机在方法一确定的安全区域外飞行。可用类似方法确定使用无人机巡检A叶片的S-S面、P-S面、后缘时机舱头部所处的最佳位置。
四、叶片位置对检测效果的影响
无人机所带成像设备虽然能在俯仰及水平方向调节,但调节范围有限。为了获得最佳成像效果,镜头轴线最好垂直于叶片待观测面。
应用无人机对叶片巡检时,叶片需顺桨且需要将叶轮完全固定,以防叶轮突然转动造成无人机与叶片的碰撞。叶轮静止状态下风电机组叶片所处典型位置示意图如图7所示。

图5 考虑风向、光线时机舱头部可调节范围

图6 机舱与光线、风向的相对位置

图7 叶片处于不同位置时后缘观测结果
在不考虑光线、风向等对巡检效果影响、叶轮处于图8(a)所示位置时,通过无人机可以方便地巡检A叶片各表面、B、C叶片的前后缘,但巡检B、C叶片的S-S或P-S面时,为了使镜头轴线垂直于叶片待观测面,无人机有时需要在叶片上方飞行,存在视觉盲区,此时操作人员将无法判断无人机与叶片之间的距离。从设备安全角度出发,为防止无人机与叶片碰撞事故的发生,巡检过程中不建议无人机在叶片上方飞行。为有效巡检B、C叶片的S-S或P-S面,需将B、C叶片转到图8(a)中A叶片或图8(c)中C叶片的位置。同理,当叶轮处于图8(b)位置,巡检三支叶片时均会存在不同程度的视线盲区,因此需要将各叶片转到图8(a)中A叶片或者图8(c)中C叶片所处的位置,以便完成对相应叶片各面的巡检。当叶轮处于图8(c)位置时,可以完成对A、B叶片前、后缘以及C叶片的S-S、P-S面、前缘的巡检,但无法完成对A、B叶片S-S、P-S面(视觉盲区原因)、C叶片后缘(空间原因)的巡检。
在考虑太阳光线对巡检效果的影响时,巡检过程中待巡检面所处的位置应避免存在阴影区域,否则将影响巡检效果,如图7(a)所示。如果待巡检面存在阴影区,需将待巡检面转到无阴影区域,这样才能获得较好的成像效果,如图7(b)所示。
晴天时在巡检叶片过程中为满足光线的要求,当观测处于图8(a)中A叶片所示位置——叶片的S-S、P-S面及前、后缘时,如图9所示,至少需要将风电机组偏航三次(阴天时视光线情况确定偏航次数),同时机舱头部所处位置还需满足方法一的要求,以保证无人机的安全飞行。当待检叶片处于图8(c)中C叶片所处位置时,为有效观测C叶片的S-S、P-S面及叶片前、后缘,晴天时至少需要将风电机组偏航三次,叶片位置调整一次(调整到竖直位置),以满足光线及无人机安全飞行要求。

图8 叶轮所处典型位置示意图

图9 观测叶片不同位置时叶轮所处位置
由上可见,为了提高检测效率,本文建议利用无人机巡检叶片时将待测叶片调整到接近图8(a)中A叶片所处位置,然后按顺序检测三支叶片。在晴天时巡检三支叶片需要偏航9次(阴天时视光线情况确定偏航次数),才能获取清晰可用的检测图片及视频数据。
五、温度、湿度、海拔高度对巡检效果的影响
温度主要会对无人机电池性能造成影响,例如本文所用无人机所带的锂电池,当环境温度在35℃以上、5℃以下时,无人机的续航能力将随着锂电池性能的变差而下降,从而降低巡检效率。
湿度也会影响无人机所带电池的性能,当空气湿度较大时,锂电池的性能也会变差,在沿海及空气湿度较大的地区利用无人机巡检叶片时,要特别注意观察电池状况及电量相关提示,以确保飞行安全。
当风电机组所处海拔高度超出无人机允许飞行的海拔高度要求时,环境因素(温度、湿度等)才会导致飞行器电池及动力系统性能的下降,进而影响飞行器的性能。目前国内高海拔风电机组大约在2000m-4000m之间,未超出现有民用无人机可飞行海拔高度范围。

表2 各工作人员工作内容

图10 无人机现场巡检照片
人员配备及工作分工
无人机巡检叶片过程中,为防止无人机与叶片发生撞击,需要将叶片顺桨并将叶轮锁死。由于目前现有民用多旋翼无人机无法自主避开障碍物,为了确保巡检过程中的设备安全及获取有效的图像信息,也为提高巡检效率,通过现场试验,就目前现有无人机技术而言,巡检过程中建议配备3—4名工作人员,各人员的工作内容等如表2所示。
影响巡检效果的不利因素
通过现场试验,本文总结了影响无人机近距离微观巡检风电机组叶片效果的不利因素,包括:
(1)现有可用无人机水平方向上无360°范围内的距离检测及报警、自主避开障碍物功能,观测人员的视觉误差及较强湍流会造成无人机与叶片碰撞事故的发生。
(2)无人机续航时间过短。目前常见无人机续航能力最多维持15min。
(3)无人机操作人员及观察员长时间、远距离大角度仰头观察无人机,极易疲劳,直接影响到无人机的飞行安全。
(4)叶片表面的灰尘会影响成像效果,导致从拍摄的图像中无法准确获取早期裂纹或腐蚀斑点等信息。
结论和建议
无人机巡检叶片作为新生事物,虽不能完全替代现有传统的巡检方式,但其本身在减少停机时间、提高巡检效率、减少人员伤亡、降低叶片检测成本等方面具有较强的优势。随着风电机组叶片巡检需求的增大,无人机在风电领域的应用市场将迅速发展。
目前国内市场可用的无人机多为航拍研制,不适合在风电机组叶片近距离巡检过程中使用。通过试验可以得出无人机大规模用于叶片微观巡检时还需从如下几方面进行改进:
(1)无人机需具备自主避开障碍物及水平方向360范围内的雷达测距、显示及报警功能。
(2)无人机除携带高清成像设备外,还应添加360范围内的成像设备,使操作人员从地面接收装置上能查看无人机四周的情况,不需要通过人眼直接观察来确定无人机与风电机组间的相对位置,避免疲劳操作。
(3)无人机的旋翼外需添加保护装置,使无人机与风电机组碰撞时旋翼不至于马上损坏。
(4)无人机的电池容量及性能需进一步提高,以增加无人机的续航能力,提高巡检效率。
此外,为了有效巡检风电机组叶片的表面状况,叶片表面需尽可能保持清洁。
(作者单位:西安热工研究院有限公司)
