负压吸附技术在太阳能电池片全自动串焊机中的应用
2017-11-03李瑞涛
李瑞涛
(中电科风华信息装备股份有限公司,山西太原030024)
负压吸附技术在太阳能电池片全自动串焊机中的应用
李瑞涛
(中电科风华信息装备股份有限公司,山西太原030024)
介绍了光伏产业中太阳能电池片全自动串焊机中的电池片搬运技术,并对所采用的负压吸附技术应用的场合进行了分析。
负压吸附;全自动串焊机;太阳能电池
以真空吸附实现搬运的手段,已在现代工业领域方面得到了广泛应用。对任何具有较光滑表面、质量较轻的物体特别是不适合采用机械夹紧的物体,真空吸附都有其独特的优势。
在光伏行业中,太阳能电池片作为一种表面较为光滑平整,厚度很薄且易破碎的物品,对其使用真空吸附的方式进行搬运和移载的优势格外明显。
1 负压吸附技术的分类
根据产生负压的方法分类,真空吸附系统可分为两种类型,即:以真空发生器为核心元件的真空系统;以真空泵为核心元件的真空系统。两种真空系统的技术特点如表1所示。
2 全自动串焊机真空吸附3种方式的应用场合
太阳能电池片全自动串焊机是光伏行业组件生产中的关键设备,该设备主要实现了,电池片从篮具到焊接位置的搬运摆放,以及电池片互联条的自动裁切、摆放,并最终焊接成串,而且能将焊接后的电池串自动传送以及吸取摆放。具有自动化程度高,生产效率高,焊接效果一致的特点。目前市场上的太阳能电池片全自动串焊机主流机型,生产速度可达2 400~3 000片/h,碎片率低于2‰。光伏行业中的太阳能电池片的常规尺寸为156 mm×156 mm,厚度通常为 180~200 μm,表面相对平滑,易破损。在太阳能电池片串焊过程中,对其的搬运和移载,主要采用的方式为真空吸附方式。
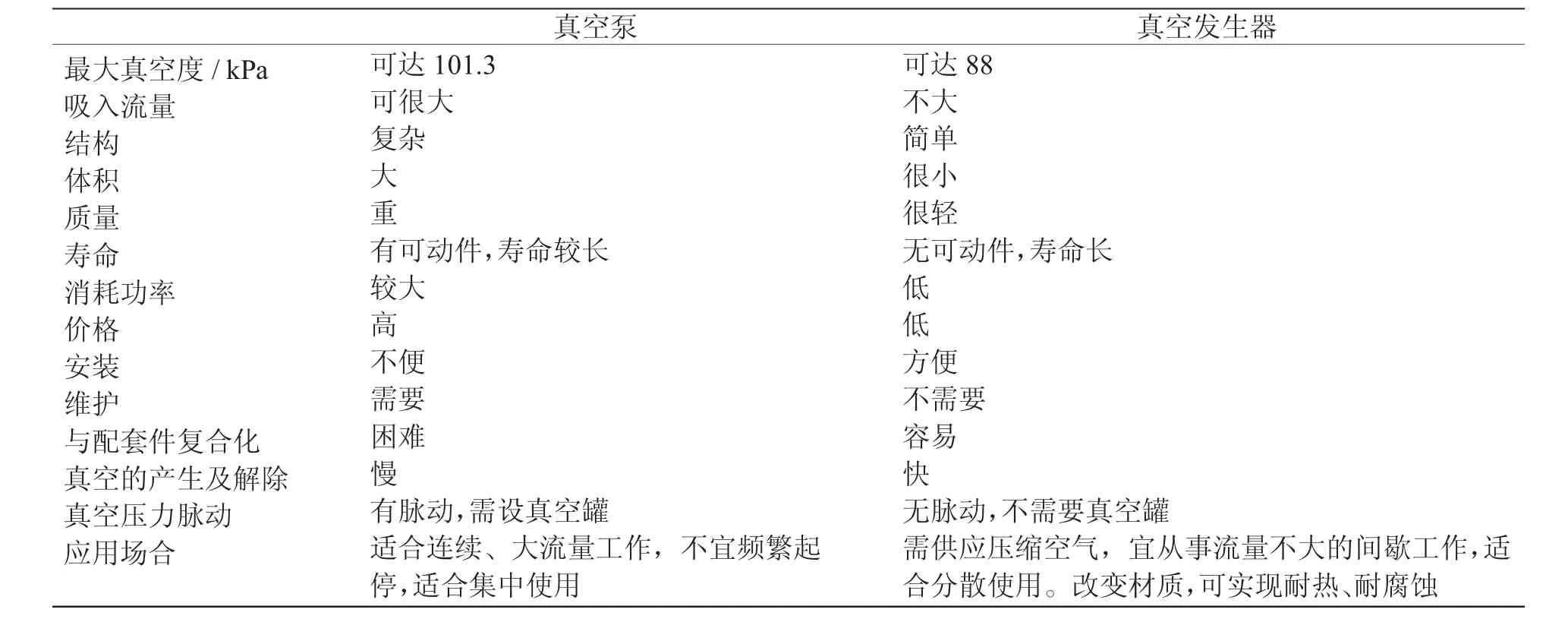
表1 两种真空系统的技术特点
在太阳能电池片全自动串焊机的设计使用中,有3种典型的工况需要使用到真空吸附技术。
第一种工况是在电池片的单片搬运中,该过程中,需要将电池片通过负压吸附,完成从篮具吸取,放置在定位装置上,经过定位装置定位后,再通过负压吸附从定位装置吸取到焊接位置上,该过程中两次吸取,以及在定位装置上的定位,都使用了负压吸附。该工况下,单片电池片的质量约为12 g,真空吸附装置需要将电池片凌空吸起。该情况下,真空吸附所需提供的吸力只需要大于电池片自身的重力。该过程对于负压吸附系统,要求产生吸附的响应时间短,而且吸附力要求小,真空需要快速切换,根据表1所列的两种产生真空方式的优缺点,该工况主要采用以真空发生器为核心元件的真空吸附系统。
第二种工况是对焊接成串的电池片搬运,通常情况下,电池片每10片或者12片焊接成一串,该过程中,需要通过多个吸盘将焊接成串的电池片进行分类搬运,该工况下,以12片为一串的电池片串焊为例,焊接成串的电池片以及金属互联条的质量约为180 g,所需吸附力大小为1.8 N。该情况下,真空吸附所需提供的吸力需要大于整串电池片的重力,且需要稳定的提供10~15 s的时间。该过程时间较长,速度较慢,要求产生的吸附力稳定、持久,所需要的压缩空气流量大,该部分的真空产生如果采用真空发生器,会造成压缩空气的大量消耗,增加设备整体的耗气量。因此根据表1所示,该部分主要采用以真空泵为核心元件的真空吸附系统。
第三种工况是通过负压吸附提供焊接压力以及吸附定位,该过程中,需要将单独的电池片通过负压吸附,固定在焊接台面上,并产生一定的恒定吸附力。该过程从电池片放置在定位台面到间歇运动到焊接位置,需要一直提供吸附力。由于电池片在焊接过程中,焊接温度可达到260℃,设备长时间工作后,焊接台部分会产生大量的热量,该部分热量会导致焊接台部分温度升高,甚至超过太阳能电池片焊接时的工艺参数温度,造成电池片的焊接不良甚至破损以及其他损害。而通过真空泵产生负压时,会带走大量的热空气,可以对焊接台进行降温,从而使焊台温度保持在一个较为恒定的水平。该工况下,单片电池片的质量约为12 g。该情况下,真空吸附所需提供的吸力需要将电池片吸附在真空台上,并对电池片下方的焊带提供压力,使得焊带熔化后在恒定的压力下完成和电池片的焊接。
该过程中要求产生的吸附力恒定,脉动小,并且要求流量大。根据表1所示,该部分主要采用以真空泵为核心元件的真空吸附系统。
3 真空吸附产生的原理
太阳能电池片全自动串焊机采用的真空泵一种为干泵,一种为风机,真空泵是在吸入口形成负压,排气口直通大气,两端压力比很大的抽除气体的机械。干泵的主要工作原理如图1所示。

图1 干泵工作原理
干泵的转子偏心置于泵壳内,上端靠近泵壳内,形成进排气口间的密封。当电机带动转子转动时,旋片在离心力的作用下贴紧泵腔的内壁。在泵体内形成多个空腔,进气口侧的空腔容积随转子的转动而增加产生真空而吸气,排气口侧的空腔容积随转子的转动而缩小,产生压力而排气。风机的工作原理如图2所示。

图2 风机工作原理
气体由吸气口吸入,当气体进入侧通道以后,旋转叶轮在旋转方向上给气体一个速度。同时叶片上的离心力使气体向外加速且压力增加。随着旋转的进行,气体的动能增加,使得沿侧通道的气体压力进一步增加,随着侧通道在出口处边窄,气体被挤出叶片并通过出口消声器排出泵体。
真空发生器是利用压缩空气的流动形成一定真空度的气动元件。典型的真空发生器的结构原理如图3所示。它是由先收缩后扩张的拉瓦尔喷管负压腔和接受管等组成,有供气口、排气口和真空口。当供气口的供气压力高于一定值后,喷管射出超声速射流。由于气体的粘性,高速射流卷吸走负压腔内的气体,使该腔体形成很高的真空度。
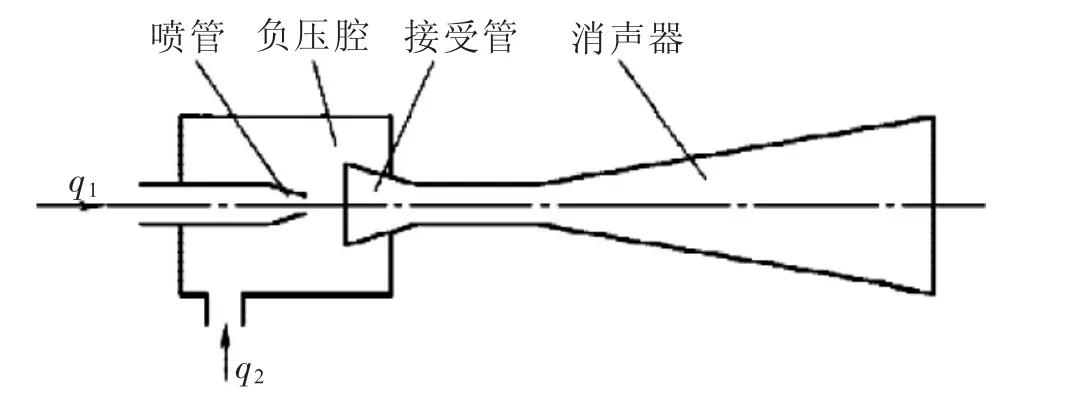
图3 真空发生器
4 结 论
通过对真空吸附产生的原理以及各种方式的优缺点的分析,结合太阳能电池片全自动串焊机工作条件以及工作流程的介绍,分析了不同真空吸附原理在设备机构中的运用,并合理的在设计中采用不同的真空吸附元件。
[1] 曾明正.实用工程材料技术手册[M]北京:机械工业出版社,2000.
[2] 成大先.机械设计手册,第五版[M].北京:化学工业出版社,2007.
[3] SMC(中国)有限公司.现代实用气动技术,第三版[M].机械工业出版社,2008.
Application of Vacuum Technology in Auto Cell Welding
LI Ruitao
(CETC Fenghua Information-equipment Co.,Ltd.,Taiyuan 030024,China)
The artice introduces the cell handing technology of auto cell welding in the photovoltaic industry,and analyze the applictions of the vacuum technology.
Vacuum;Auto cell welding;Solar cell
TB751
B
1004-4507(2017)05-0056-03
2017-08-01
李瑞涛(1982-),男,工程师,主要从事电子专用设备的设计制造。
