基于船舶行为特征的武汉大桥水域航线优化
2017-11-03桑凌志耿丹阳曹德胜严新平
桑凌志, 耿丹阳, 张 诚, 曹德胜, 严新平
(1.中国交通通信信息中心, 北京 100011; 2.交通安全应急信息技术国家工程实验室, 北京 100011; 3.武汉理工大学 智能交通系统研究中心, 武汉 430063)
2017-02-25
国家自然科学基金(51309187;51579201)
桑凌志(1987—),男,湖北荆州人,博士后,研究方向为桥区交通流组织与安全保障。E-mail: sanglz@126.com
1000-4653(2017)03-0058-06
基于船舶行为特征的武汉大桥水域航线优化
桑凌志1,2, 耿丹阳1,2, 张 诚2,3, 曹德胜1,2, 严新平2,3
(1.中国交通通信信息中心, 北京 100011; 2.交通安全应急信息技术国家工程实验室, 北京 100011; 3.武汉理工大学 智能交通系统研究中心, 武汉 430063)
为保障内河桥区水域船舶通航的安全性,提高通行效率,以长江武汉大桥水域为研究对象,基于船舶自动识别系统(Automatic Identification System,AIS)信息对该水域的船舶行为特征进行分析。利用基于欧式距离与最小方差法的聚类方法分析,认为过桥船舶可依据主机功率的不同进行划分。在长江船舶定线制的框架下,结合栅格法与蚁群算法建立武汉大桥水域的航道规划模型,对基于船舶行为特征的船舶航线进行优化。仿真结果表明:该方法在保证船舶安全、高效航行的前提下,能有效帮助海事管理部门对武汉大桥水域船舶航线进行优化。
内河;武汉长江大桥;水域;船舶行为;航线;优化
长江黄金水道是我国东部、中部和西部地区水运的主通道,在国家经济发展中占有重要地位。近年来,随着桥梁建设速度加快,长江上的通航环境在一定程度上变得恶化,增大了船舶航行风险,限制了通航尺度,该问题已引起海事部门和科研单位的重视。为保障通航安全,相关部门对桥区水域通航作出严格规定,例如船舶不能在该水域追越、下水航速需严格控制等。因此,桥区水域的通航瓶颈现象特别明显,对桥区水域的船舶交通行为进行分析,继而提出船舶航线优化方法,帮助海事管理部门组织船舶交通流,提高船舶通行效率,具有重要的现实意义。
现阶段,针对船舶交通流组织的研究主要围绕各港口水域进行。ENEELY[1]基于风险评估对交通流组织决策进行论述。郭涂城[2]借助工作排序论建立船舶进出港的最佳排序模式,其局限性在于未考虑船舶在进出港时的安全问题。LLOYD[3]和MEINE等[4]对保持安全水域空间、建立整合系统和减少排序冲突予以充分关注。徐国裕等[5-6]以港口船舶交通流为对象,利用船舶自动识别系统(Automatic Identification System,AIS)提供的信息定性研究影响船舶进出港顺序的因素,该研究涵盖船舶吃水、船舶尺度、船舶类型和距离码头泊位的远近等因素。张涛[7]在分析天津港船舶行为特征和环境特征的基础上,对船舶进出港优先顺序、船舶定线制、船舶动态报告、推荐航速、船舶航道间缓冲区设置及船舶安全间距等交通组织进行分析。杨敏[8]利用道路交通流微观仿真软件对船舶交通流进行仿真。杨星等[9]将航道作为船舶提供通航服务的主要资源,根据船舶间影响的不同,通过为船舶设置优先级研究船间相互影响下的交通流特征。熊振南等[10]对交汇水域的船舶到达数目随时间的变化进行统计,并分析天津港的船舶交通流。谭志荣等[11]针对长江水域桥区的船舶交通流特征,提出内河桥区船舶交通流量数学分析方法,以2008—2009年荆州长江大桥的船舶交通流量观测数据为基础,对内河船舶的抵达分布等进行分析。
针对桥区的研究主要集中在桥区船舶通航环境安全评价上,大多采用层次分析法、模糊综合评价法等方法[12-13],能实现桥区通航环境评价中定性与定量的相互转换,但无法兼顾系统的模糊性和随机性。LI等[14]提出的云模型能实现定性概念与定量概念之间不确定的转换,且可考虑系统的随机性和模糊性,为桥区船舶通航环境评价提供一种新方法。王娟娟等[15]基于船舶在直航路上的航迹分布特性,借鉴SHTO规范和KUNZI模型的研究思路,统计船舶的偏航角和停船距离分布规律,分析船舶在偏航情况下碰撞桥墩的概率,进而推导出直航路上船撞桥概率模型。
以上针对内河交通流特征和桥区安全通航的研究侧重于理论分析和数据建模,而船舶行为是以船舶(包括船舶驾驶员)整体为研究对象,与航速和航向等有关的船舶交通行为。因此,以真实桥区通航环境为对象,通过对与航速、航向等相关的船舶交通行为进行分析,实现对桥区水域船舶航线的合理优化,具有重要的理论和现实意义。这里以武汉大桥水域为例,通过分析该水域的船舶交通行为特征,对过桥船舶进行基本分类,建立船舶航线规划模型;通过仿真得到不同船舶的推荐航线,实现对桥区水域船舶航线的优化。
1 数据来源
这里利用的数据主要包括武汉大桥水域的船舶AIS数据和武汉长江大桥水域(武桥水道)的电子航道图数据。
1.1船舶AIS数据
船舶AIS设备可将本船的动态信息和静态信息由甚高频频道周期性地向附近水域船舶及岸台广播。通过架设在白沙洲大桥、武汉长江大桥和天兴洲大桥的3个AIS基站,可采集到武汉大桥水域过往船舶的AIS数据。
通过对2014年1月1日至3月16日及2014年7月10日至9月25日武汉长江大桥附近船舶对外发送的约60万条AIS报文进行预处理,得到用来分析武汉长江大桥水域船舶行为特征的数据。AIS数据的预处理过程见图1。
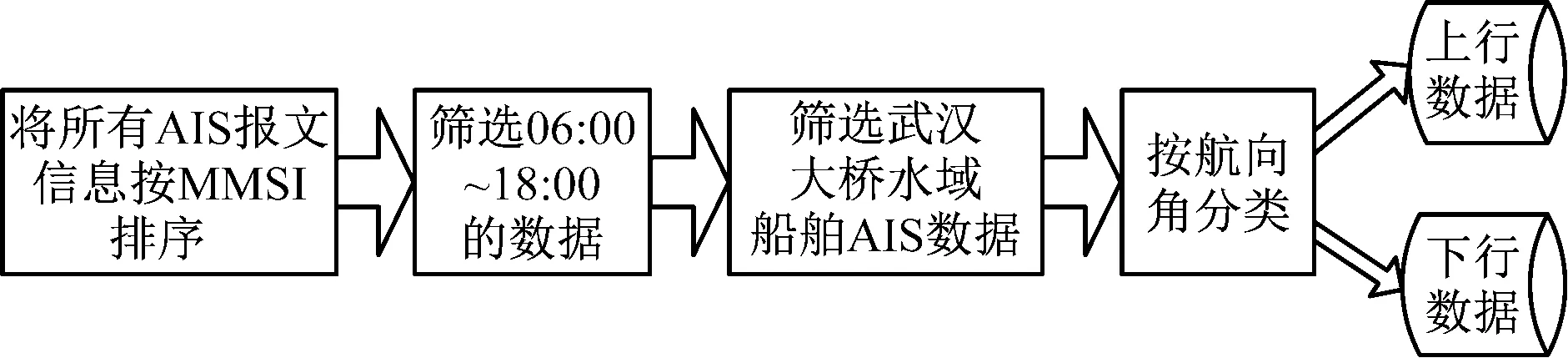
图1 AIS数据预处理过程
AIS数据的预处理步骤:
1) 按船舶海上移动业务标识码(Maritime Mobile Service Identity,MMSI)对AIS报文数据进行筛选分类,将每条船舶数据“点”的集合变为“向量”的集合。
2) 船舶在桥区水域夜航时主要借助甚高频电台与海事管理部门及附近船舶协调过桥决策,被动性较高,因此选取白天(06:00—18:00)的AIS数据进行分析。
3) 武汉长江大桥水域范围为桥梁上水1 500 m至下水1 000 m,因此利用船舶的位置信息筛选该水域内的AIS数据。
4) 船舶过桥分为上水过桥和下水过桥,二者的航行行为特征有很大差别,因此利用船舶航向角数据对上水船舶和下水船舶进行筛选、分类。
1.2长江电子航道图数据
长江电子航道图是基于S-57标准设计的,这里通过武桥水道电子航道图得到该水域的基本通航环境信息,包括岸线信息、桥梁位置分布和桥墩位置信息、航道基本尺度和航标位置信息等。
2 武汉大桥水域船舶行为特征分析
由船舶AIS信息中的船位信息可得到武汉大桥水域的船舶交通流基本形态。利用聚类方法分析船舶交通行为(如航速、航向、转向点等)特征,对船舶进行基本分类,为船舶航线规划提供船舶分类支持。武汉大桥水域船舶交通流基本形态见图2。

图2 武汉大桥水域船舶交通流基本形态
由图2可知,航道右侧下水船舶在过桥时航向基本上没有变化。分析AIS数据发现,船舶航速也基本上保持一致。由于下水船舶的航速相对较快,通航瓶颈现象相对不明显,因此主要对上水船舶进行分析。
2.1聚类分析法
采用聚类分析法,通过分析船舶行为特征实现对船舶的分类。聚类分析存在样本距离公式选取和族间划分方法2个关键问题,这里采用基于欧氏距离的样本距离计算方法。
假设有2个n维样本x1=(x11,x12,…,x1n)和x2=(x21,x22,…,x2n),则其欧氏距离为

(1)
虽然聚类分析的归类步骤基本上一致,但类间距离计算方法存在差别会导致系统的聚类方法发生变化,这里利用最小方差法计算类间距离。
定义类Gi与类Gj之间的距离为族i内任意一点与族j内任意一点组合的最小值,即
Dij=mindij
(2)
设类Gp与类Gq合并成一个新类Gr,则任意类Gk与类Gr的距离为
(3)
2.2船舶行为计算方法
这里的船舶行为主要包括上水船舶的速度变化、航向变化和转向等3类,其中:速度变化和航向变化可根据2个相邻AIS信息得到;转向行为则需以船舶轨迹中的航迹斜率、速度变化和航向变化为依据,通过转向点解析得到。[16]图3为利用AIS源数据得到转向点的过程。
确定转向点的毗邻点是此次数据处理的关键,船舶转向点附近的AIS船位点在经度(λ)和纬度(φ)、航向(C)、速度(v)的变化情况等方面都具有较为明显的特征。这里通过以下3个步骤确定转向点:

图3 利用AIS源数据得到转向点的过程
1) 计算航迹斜率变化,方法为

(4)
2) 计算速度随时间的变化,方法为

(5)
3) 计算航向随时间的变化,方法为

(6)
依据以上3个向量,以时间序列为基准进行大小排序。
内河船舶在过桥时一般有直线和三次曲线的交点及三次曲线和直线的交点2类转向点[16],根据该船舶轨迹的基本特征,筛选船舶的转向行为特征点。
2.3船舶交通行为特征分析
分别从过桥速度、航向和转向点位置等3个方面进行聚类,分析武汉大桥水域上行船舶的交通流特征,对船舶进行分类。由于该水道上水有2个通航孔,因此仅将船舶聚为2类进行分析。
2.3.1船舶过桥速度变化聚类
根据AIS数据得到上水船舶在通过武汉大桥4号通航孔时速度的变化情况,利用欧式距离判断样本距离,利用最小方差法得到聚类方向,对船舶转向时速度的变化进行聚类分析。图4为采用聚类分析研究船舶速度变化,横轴为按船舶等级从高到低梯度分布的样本号,纵轴为类间距离。
根据聚类结果,当将样本数据指定为2类时,第1类船舶主要由1 500总吨以上船舶和600总吨以下船舶组成,而第2类船舶吨位在200总吨以上。
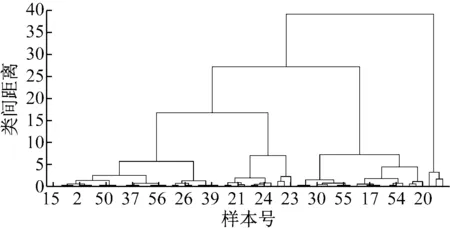
图4 采用聚类分析研究船舶速度变化
此外,船舶主机功率分布也体现出无特征性。可见,根据船舶速度变化无法实现船舶分类。
2.3.2船舶过桥航向变化聚类
采用聚类分析方法对航向变化数据进行聚类,分析船舶转向过程中速度变化行为特征。图5为采用聚类分析研究船舶航向变化,横轴为按船舶等级从高到低梯度分布的样本号,纵轴为类间距离。

图5 采用聚类分析研究船舶航向变化
根据聚类结果,当将样本数据指定为2类时,第1类船舶主要是由1 600总吨以上船舶构成,第2类船舶吨位在200~2 000总吨)。此外,船舶主机功率分布也体现出无特征性。可见,根据航向变化无法实现船舶分类。
2.3.3船舶过桥转向点聚类
由于水流不同,船舶在枯水期(2014年1月1日至3月16日的数据)的过桥行为与丰水期(2014年7月10日至9月25日的数据)是不同的。经过图3的处理过程解析船舶的转向点信息之后发现:无论是在枯水期还是在丰水期,船舶尺度越大,在过桥时转向越早;船舶尺度越小,其转向点越离散,这与船舶的操纵性有关,大型船舶在过桥时因操纵性较差需尽早调整航向,以保证过桥安全。同时,相比在丰水期,船舶转向点在枯水期整体偏向航道内侧,这是由于在枯水期水位降低,航道变窄,船舶可通航的区域变小。图6和图7分别为丰水期船舶转向点位置聚类及枯水期船舶转向点位置聚类,横轴为按船舶等级从高到低梯度分布的样本号,纵轴为类间距离。
通过聚类分析发现,与速度变化和航向变化相比,船舶转向点位置在主机功率方面具有明显的分类特征,具有明显的梯度排列特点。
(1) 在丰水期:由聚类产生的第1类船舶中,功率≥1 400 kW的船舶占75%;聚类产生的第2类船舶中,功率<1 400 kW的船舶占65.71%。

图6 丰水期船舶转向点位置聚类

图7 枯水期船舶转向点位置聚类
(2) 在枯水期:由聚类产生的第1类船舶中,功率≥1 400 kW的船舶占76.47%;聚类产生的第2类船舶中,功率<1 400 kW的船舶占59.37%。
对比分析船舶在转向过程中速度变化、航向变化和转向点位置的特征发现,不同类型船舶在过桥转向时转向点的位置差异较为明显。主机功率≥1 400 kW的船舶无论是在丰水期还是在枯水期均较早地调整船位,转向点密集;而主机功率<1 400 kW的船舶虽相对分散,但仍呈现出随功率梯度分布的特征。因此,以船舶主机功率1 400 kW为节点,对船舶的航线进行优化分析。
3 船舶航线的优化方法与实现
3.1蚁群算法
蚁群算法是通过模拟真实蚁群的觅食机理求解优化问题的方案:将m个蚂蚁按照一定的初始化规则分布在n个城市,每个蚂蚁根据状态转移规则选择遍历这些城市,当所有的蚂蚁都完成其遍历过程之后,每个蚂蚁都建立一条回路,此时可计算出迭代的最短路径,此后反复迭代,直至满足终止条件。
栅格法通过将环境分解成一系列具有二值信息的网格单元[17],在路径规划时采用栅格来表示地图。武桥水道Map由栅格mapi构成[18],即
Map={mapi,mapi=0 or 1},
i∈Z
(7)
式(7)中:mapi=0表示i格为自由航行区域;mapi=1表示i格为障碍航行区域;0和1为栅格的通航因子。在按照规则赋予每个栅格一个通航因子之后,船舶航线的规划问题即转化为在栅格网上找2个栅格节点之间的最优路径问题。
3.2船舶航线优化方法
分道通航是船舶定线制的主要形式,船舶航线优化是在长江干线船舶分道通航制的基础上根据航标标识,使下水船舶在航道右侧航行、上水船舶在航道左侧航行。船舶航线优化方法见图7。

图7 船舶航线优化方法
采用栅格法进行航道空间建模,将船舶通航环境离散化、数学化。根据图示水深和具体水位信息,在设定船舶吃水阈值后得到仅包含0和1的航道环境矩阵(0代表自由航行区域,1代表障碍航行区域)。
根据《内河运输船舶标准船型指标体系》,长江干线船舶的长度主要在50~100 m,宽度主要在8~16 m。[19]因此,在处理小功率船舶时选用54 m×54 m的栅格矩阵,在处理大功率船舶时选用108 m×54 m的栅格矩阵。利用长江电子航道图(武桥水道段)获取图示水深信息,以进一步通过汉口水位得到航道实际水深(见图8和图9)。

图8 武桥水道水深示意图9 区域深度示意
在得到实际水深信息后,可进一步建立船舶航行状态连通图,将环境矩阵变为蚂蚁搜索所需的区域连接矩阵。图10为状态连通矩阵示意,连通图中心代表船舶当前所在区域,在一个平面范围内可供其选择的下一步航行区域有其周围的8个矩阵,航行至矩阵4条边的距离计为1,航行至4个角的距离计为1.414,分别用1和1.414表示选择该方向的距离代价。在进行航行代价计算和最佳航路筛选时,将距离代价作为主要考虑的因素。其他外围的矩阵因在一个迭代周期内无法航行进入,标记为inf(即无穷大),以减少计算量。

图10 状态连通矩阵示意
具体航线优化实现过程为:利用栅格法将长江武汉段水域栅格化;根据实际水深信息确定是否可航及每个栅格附近的8个栅格的状态,进而确定全局状态;将所模拟的船舶(蚂蚁)放在武汉长江大桥水域下游及上游边界处准备过桥;以每艘船舶(蚂蚁)为中心,搜索其附近可通航的自由栅格点,按局部信息素更新每艘船舶(蚂蚁)周围的数据,当所有船舶(蚂蚁)都完成一次路径构建之后,计算所有船舶此次通航行动的代价,并进行比较;保存最优的航线和相应的航行代价,并进行全局信息素更新;循环该过程,直到迭代次数用完或达到其他约束条件。具体航线优化算法流程见图11。

图11 航线优化算法流程
3.3武桥水道船舶航线优化实现
在船舶分道通航的基础上,对武汉大桥水域进行航线优化。设定主机功率≥1 400 kW的船舶的推荐通航水深最小为4 m,主机功率<1 400 kW的小型船的推荐通航水深最低为3 m(具体推荐通航水深根据实际需求调整),对船舶航线的优化过程进行仿真实现,仿真结果见图12和图13。
图12和图13中黑色区域为自由航行区域,白色区域为障碍航行区域。图12中的线条为主航道航线设计中所有船舶(蚂蚁)探索过的路线,图13中的线条为其中的最小代价航线,即最优航线。仿真中选取的搜索初始点和到达点根据武汉大桥附近船舶的航迹数据得到。
图14为平均航线代价和最小航行代价收敛曲线,可看出在迭代39次之后,平均航行代价和最小航行代价均趋于收敛,收敛结果为37.522 0,已得到最优航线。

图12 主航道设计中全部航线图13 主航道设计中最小代价航线
在得到大型船舶的优化航线之后,进一步在主航道中将该航线的航迹带设置为不可通航区域,进而对小型船舶进行航线优化,结果见图15。

图14 平均航线代价和最小航行代价收敛曲线图15 次级航道最小航行代价航路图
可见,通过采用栅格法对长江武汉段水域进行处理,利用蚁群算法可实现武汉大桥水域不同船舶的航线优化。
4 结束语
1) 以长江干线上典型的武汉大桥水域为研究对象进行基于船舶行为特征的航线优化,对海事管理部门的通航安全管理具有重要的现实意义。
2) 利用船舶AIS数据筛选出船舶航行行为基本数据,进而对船舶行为(如航速变化、航线变化及转向点)进行聚类分析。结果表明,在以主机功率1 400 kW作为节点时,上水船舶的转向点差异明显。因此,以船舶主机功率的不同对船舶进行分类,以对不同类别船舶的航线进行优化。
3) 利用电子航道图中的图示水深数据和实际水位数据,采用栅格法对长江武汉段水域进行处理,通过区分船舶自由航行区域和障碍航行区域保证船舶安全航行,利用蚁群算法提出武汉长江大桥水域不同船舶的航线优化方案,并通过仿真来实现。
4) 武汉长江大桥水域船舶的航行方法在枯水期、丰水期随着水深的变化有着明显的不同,需进一步搜集数据对不同时期的船舶行为影响因素进行分析,以实现对不同水位期不同船舶的航线优化。
[1] ENEELY L N. VTS application of risk-based decision making[C]//Proceedings of VTS 2004. Hong Kong,2004:85-90.
[2] 郭涂城,徐国裕,方怡雅.船舶进出港排序模式构建之研究[C]//第五届十校联盟航运学术研讨会论文集.台南:2007:55-67.
[3] LLOYD D N. Integrating VTS with Port Operation[C]//Proceedings of VTS 2004. Hong Kong,2004:44-52.
[4] MEINE J, KRAMER M. Creation of a region VTS with Data Fusion and Integration of Vessel Data and Movement Details over the Area of Several Independent Ports, Coastal and Inland Waterways[C]. Proceedings of VTS 2004. Hong Kong, 2004:235-248.
[5] 徐国裕,刘人杰,吴兆麟.单向水道船舶进出港排序权重分析[J].中国航海,2008,31(4):379-382.
[6] 徐国裕,郭涂城,吴兆麟.单向水道船舶进出港最佳排序模式[J].大连海事大学学报,2008,34(4):150-153.
[7] 张涛.天津港主航道拓宽工程营运期交通流组织模式研究[D].武汉:武汉理工大学,2010.
[8] 杨敏. 基于VB和VISSIM的船舶交通流仿真控制分析[J]. 中国水运, 2012(10): 42-43.
[9] 杨星,李键,陈巍博,等. 内河船舶交通流建模与仿真研究[J].中国航海,2013,36(3):80-85.
[10] 熊振南,程俊康,翁跃宗. 点统计法在船舶交通流分析中的应用[J]. 中国航海,2009,32(1):64-67.
[11] 谭志荣, 严新平, 刘亮. 长江干线桥区船舶到达规律数学模型及检验[J]. 交通信息与安全, 2010, 28(2):70-73.
[12] 王再明. 长江干线大桥水域通航环境安全评价的研究[D]. 武汉:武汉理工大学, 2005.
[13] 欧阳涛,陈海波.模糊综合评价法在船撞桥风险评估中的应用[J].中国水运,2009,9(1):50-51.
[14] LI D, HAN J, SHI X, et al. Knowledge Representation and Discovery Based on Linguistic Atoms[J]. Knowledge-Based Systems, 1998, 10(7):431-440.
[15] 王娟娟, 曹凯. 基于栅格法的机器人路径规划[J]. 农业装备与车辆工程, 2009(4):14-17.
[16] SANG L Z, WALL A, MAO Z, et al. A Novel Method for Restoring the Trajectory of the Inland Waterway Ship by Using AIS Data[J]. Ocean Engineering, 2015, 110: 183-194.
[17] 吴建军. 分道通航制水域航行环境安全的集对综合评价研究[D]. 大连:大连海事大学, 2010.
[18] 黄耀. 基于栅格法的汽车路径规划[D]. 武汉:华中科技大学, 2008.
[19] 殷业廷. 内河运输船舶标准船型指标体系的解读[J]. 世界海运, 2014, 37(7):21-23.
OptimizationofShipRoutesinWuhanYangtzeRiverBridgeWaterwayBasedonShipBehaviorCharacteristics
SANGLingzhi1,2,GENGDanyang1,2,ZHANGCheng2,3,CAODesheng1,2,YANXinping2,3
(1. China Transport Telecommunications and Information Center, Beijing 100011, China; 2. National Engineering Laboratory of Transport Safety and Emergency Informatics, Beijing 100011, China; 3. Intelligent Transportation System of Research Center, Wuhan University of Technology, Wuhan 430063, China)
The AIS(Automatic Identification System) data collected from Wuhan Yangtze River bridge waterway is processed to find the behavior characteristics of ships in the area. The clustering analysis is conducted based on the Euclidean distance and the minimum variance. The analysis shows that the passing inland ships can be categorized according to their main engine power. In the framework of the traffic separation scheme in the Yangtze River, a route-planning model for ships with differing ship behavior characteristics is proposed based on the grid method and the ant colony optimization algorithm. Simulations show that the proposed method can effectively optimize the ship route in the Wuhan Yangtze River bridge waterway area, which may help Maritime Safety Administrations to improve the ship route scheme.
inland; Wuhan Yangtze River bridge; waterway; ship behavior; route; optimization
U692.3+1
A
