机载相控阵雷达的数据处理建模与仿真
2017-11-02雷张华
雷张华 谢 敏
(西安电子工程研究所 西安 710100)
机载相控阵雷达的数据处理建模与仿真
雷张华 谢 敏
(西安电子工程研究所 西安 710100)
针对机载相控阵雷达数据处理模块化的建模与仿真问题,文章首先对仿真平台的对比、坐标变化的必要性、数据处理的特点作了简单的介绍;然后详细地阐述了坐标系定义及变换过程,数据处理模块设计方法;最后分析验证了飞机目标经过数据处理后的误差结果和航迹显示。通过对机载雷达数据处理模块化的算法研究,不仅提高了软件产品的开发效率和可靠性,而且丰富了机载相控阵雷达仿真系统的组件库。
坐标变换;数据处理;模块化建模和仿真
Abstract: Aiming at modeling and simulation issue of airborne phased array radar data processing modularization, firstly, the comparison of simulation platform, necessity of coordinate transformation and characteristic of data processing is introduced briefly; then the definition of coordinate system and process of coordinate transformation and designing method of data processing module is depicted in detail; and finally, the error result and track display of aircraft target is analyzed and verified after data processing. Efficiency and reliability of developed software product is not only improved, but also assembly library of airborne phased array radar simulation system is enriched via studying algorithm of airborne radar data processing modularization.
Keywords:coordinate transformation; data processing; modularization modeling and simulation
0 引言
在军用领域中,利用软件平台对某型号军品的工作原理进行模拟仿真发挥着日益重要的作用。不仅可以对模块进行建模和仿真,而且可以对仿真结果进行分析和评估。虽然MathWorks公司的SIMULINK平台、安捷伦公司的ADS平台可以直接用图形来搭建模型,直观且易扩展,但是与其他仿真系统联调时兼容性不强,交互比较困难;而本文使用微软公司的Visual Studio 2010平台则能生成雷达功能模块的动态链接库文件,可实现标准化、模块化建模,仿真速度快、兼容性好。
数据处理的航迹管理功能即是对目标建立一个档案,保存目标信息,不仅可以对目标进行连续稳定的跟踪,而且可以对当前检测点迹与已有航迹进行关联。因为在不同的坐标系下定义不同的飞机运动模型,为了保持空间一致性,并以大地坐标系为惯性参考系,因此要通过坐标系变换,统一到共同的坐标系下进行计算。相控阵雷达的天线通过改变辐射单元的相位控制产生的波束指向来探测目标[1],扫描方式是电扫,所以相控阵天线具有波束捷变、跟踪精度高等优点,可根据监测空域内目标的数量合理配置雷达天线回访时间,而相控阵机载雷达的主要工作模式是TAS(Track And Search),即搜索加跟踪模式,所以在数据处理模块中要对搜索、确认、跟踪、小搜这四种不同的事件类型进行合理的转换。
本文将标准化、模块化建模的思想应用到数据处理建模设计中,不仅可以丰富雷达仿真系统组件库,更能提高软件产品研制效率,保证软件质量和可靠性。
1 机载雷达的坐标转换方法
1.1 坐标系定义

图1 坐标系示意图
(1)大地坐标系:如图1所示,空间目标所处在空间T点处,在大地坐标系下用(B,L,H)表示,其中B代表目标点的纬度,L代表点目标的经度,H代表目标T点在法线方向上与地球球面的绝对距离,即高度。
(2)地稳系:目标机和载机分别以某固定点为坐标原点的北东地直角坐标系OXYZ,X、Y、Z分别代表北向、东向、地向坐标。
(3)地滚系:是目标飞机以当前载机质心为原点的北东地直角坐标系,该坐标系的原点随载机雷达位置的改变而改变。


1.2 坐标系变换
仿真时,按如图2的转换流程进行坐标转换,已知载机和目标机的大地坐标,以载机初始时刻位置为原点[1],建立目标的北东地直角坐标系,再建立一个飞机运动模块,分别根据载机和目标机的北、东、地三向速度,实时计算机载雷达和目标飞机的北东地坐标,然后以机载雷达为原点建立目标点的北东地坐标系,再考虑目标飞机的偏航角、爬升角、横滚角这三个姿态角[3]对坐标转换的影响,求出机体坐标系下目标机的北东地坐标,接着考虑有源相控阵雷达天线安装角的影响,最后根据此时北东地坐标算出球坐标系下目标飞机相对于机载雷达的径向距离(PlaneR)、方位角(PlaneAzi)、俯仰角(PlaneEle)。

图2 坐标转换流程图
(1)由大地测量学知,在WGS84(World Geodetic System 1984)坐标系[4]中,以地心原点为坐标原点,得到地稳系(X,Y,Z)和大地坐标纬经高(B,L,H)之间的关系,规定X指北向、Y指东向、Z指地向。


上式中,RN是地球的卯酉圈曲率半径,a表示地球长半轴的长度6378137m,b表示地球短半轴的长度6356752.3142m,e是地球第一偏心率常数错误!未找到引用源。
在工程应用中,可以利用下面公式,直接将目标飞机的经纬高转到以载机为原点的北东地地滚系。设置载机的经纬高度坐标为(Jr,Wr,Hr),目标机的经纬高度坐标为(Jt,Wt,Ht),而经线上的每分代表1853.2m,所以,目标机相对于载机的北东地坐标(XNorth,YEast,ZDown)为:
(2)从目标机相对于载机的地滚系下的北东地(XNorth,YEast,ZDown)坐标转换到机体系(X4,Y4,Z4)的变换过程为:
第一步,考虑偏航角(yaw)对坐标转换的影响:
第二步,考虑爬升角(pitch)对坐标转换的影响:
第三步,考虑横滚角(roll)对坐标转换的影响:
(3)考虑相控阵天线安装角(kesh)对坐标转换的影响:
一般情况下天线安装角设置为零,此时,X5=X4,Y5=Y4,Z5=Z4。
(4)最后,求出目标机在球坐标系下相对于机载雷达的径向距离、方位角、俯仰角:

PlaneAzi=atan(Y5,X5)

2 机载雷达的数据处理
数据处理模块的主要任务如图3所示,信号处理模块的输出即目标检测结果作为数据预处理模块的输入数据,经过数据预处理、航迹管理(起始、关联、维持、终结)、坐标反转换、点迹滤波、事件转换这五个小模块,得到目标检测信息经过数据处理模块的滤波输出。

图3 数据处理模块的流程图
(1)数据预处理
对目标检测点迹信息进行数据预处理,删除虚假点迹,而虚假点迹的主要产生原因是重复检测同一个目标的情况。可能是雷达在搜索过程中在相邻波位都能检测到的已有目标,以第一次检测到的目标信息为准点迹信息;有可能在跟踪过程中重新搜索到与已有目标信息能关联上的新目标,则不处理该点迹信息,而应执行其他事件;若是小搜事件,只处理能够搜索到的,且幅值最大的一个点迹信息。
(2)航迹管理
航迹管理是要将准目标信息和已建立好的航迹进行门限关联,然后按判定结果决定航迹起始、航迹维持或航迹终结。
第一,航迹管理其实是一个配对的过程。在搜索过程中搜索到新目标和已有目标的航迹信息在距离、方位、俯仰三维进行共同关联,若关联成功则更新航迹信息;若关联失败,则需起始一条新的航迹。更新点迹信息时,要将准目标信息,即是在球坐标系下的距离、方位、俯仰角信息反转到地稳系下的北、东、地三向位置坐标,采用卡尔曼滤波技术[6]进行滤波和预测,以便获得最佳估计。
第二,如果在跟踪过程中,目标丢失,则进入小范围搜索过程,若小搜不到目标,则判为航迹终结。目标丢失的原因有:目标飞离雷达威力范围,或目标强烈机动飞出跟踪滤波波门。如果在敌我作战中,敌机目标被我方飞机上的武器击落,仿真中敌机目标被判航迹终结。
(3)事件转换
在卡尔曼滤波后,要进行事件类型的转换。对于机载相控阵雷达而言,有四种事件类型:搜索、确认、跟踪、小搜。搜索是指对预先设定好的飞机扫描最大区域,在正弦空间坐标系下用交错波束编排方法进行波位编排。如图4所示,图中横纵坐标为弧度单位,转换为度则为方位范围(-30°,30°),俯仰范围(-5°,5°),共安排了78个交错波位。当天线波束以电扫方式遍历空域时,搜索目标。刚开始为搜索事件,直到连续两次搜索到新目标后,才把事件类型转为确认事件。确认事件后,再次检测到目标点迹,且和已有航迹关联成功,在进行点迹滤波后把事件类型由确认转为跟踪,跟踪事件的天线指向来自于执行确认事件中滤波器输出的方位角和俯仰角的预测值。小搜事件指对目标进行跟踪事件时目标丢失,天线指向为上一个跟踪状态下滤波器输出的方位角和俯仰角的预测值。此时若重新搜到目标,则转确认事件,再次跟踪,若没有重新搜索到,则判定目标丢失,航迹终结。此时事件转换小模块需要和复杂的资源调度模块来联合安排这些事件的转换,转换过程如图5示:

图4 波位编排图

图5 事件转换过程示意图
在实际应用中,两个或以上的多目标互相靠近时,关联的过程就变得复杂。要么是单个点迹位于多个波门内,要么是多个点迹位于单个目标波门内,目前对此类问题有两种解决方法[7]:一种是最近邻域法,另一种是全邻域法。此处采取最近邻域法中的距离最近优先准则进行航迹关联处理,此方法易于工程实现,它选用落入波门内与航迹预测点统计距离最近的点迹分配给航迹,进行航迹维持。
数据交互功能作为输入输出信息交互,根据具体的实际应用,可提供多种通信接口模块。在软件仿真中,输入输出接口写成矩阵格式较为方便,模块内部初始化参数可写在XML表里或数据库里;若跟其他平台进行交互时,设计师可使用以太网、光纤网等通信接口连接[8]。
3 仿真数据分析
基于Visual Studio 2010平台,用数据处理模块对目标的航迹管理进行验证。由表1知,设置蓝方1和蓝方2飞机的初始纬度、经度、高度完全相同,蓝方1、蓝方2、红方1飞机以各自的三向速度做匀速运动。

表1 目标初始位置参数
图6为红方1雷达的B显界面[4],横轴表示相控阵天线方位维上的扫描区间(-60°,60°),纵向代表目标飞机相对于载机的径向距离,蓝色小方块表示机载雷达实时的扫描波束,红色圆点表示机载雷达实时探测到的蓝方目标信息。
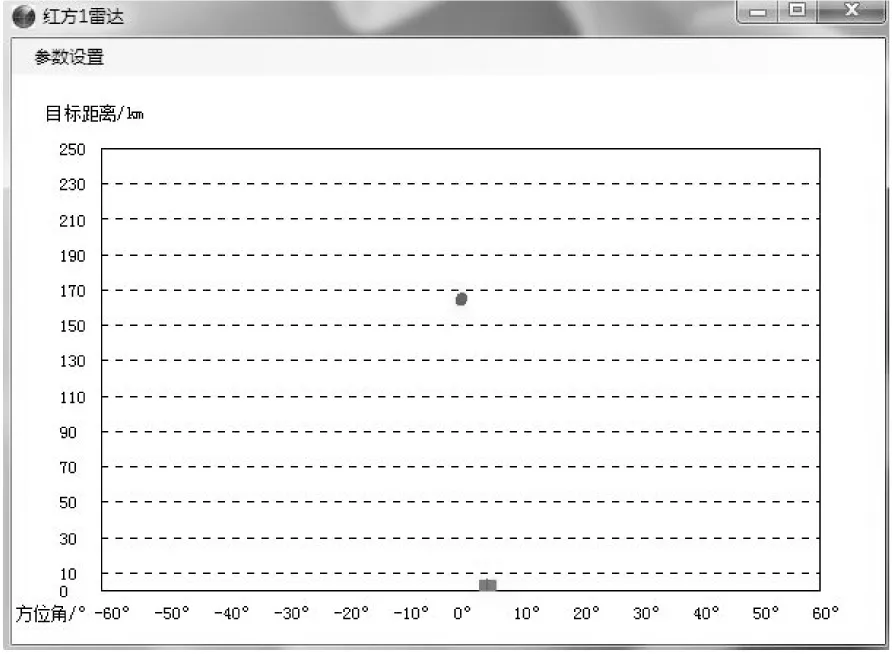
图6(a) B显界面示意图

图6(b) B显界面示意图
由于蓝方1和蓝方2的初始纬度、经度、高度相同,北向速度虽然方向相同,但大小不同,如图6(a)示,刚开始两个目标显示结果为一个共同的圆点;又因为蓝方2飞得比蓝方1快,过一段时间后,如图6(b)示,两个目标在界面上就可以独立显示。从而验证了两个距离较近的目标可以通过最近邻域法区分,且成功地完成了对目标的点迹管理进行实时更新。
进而对单目标的数据处理输出的滤波径向距离和真实目标信息做误差分析。如图、图8所示,横轴代表采样点数目,纵轴分别代表距离、角度误差值。径向距离误差在50m内,方位角度误差在0.2°内,进而证明了坐标转换的正确性。
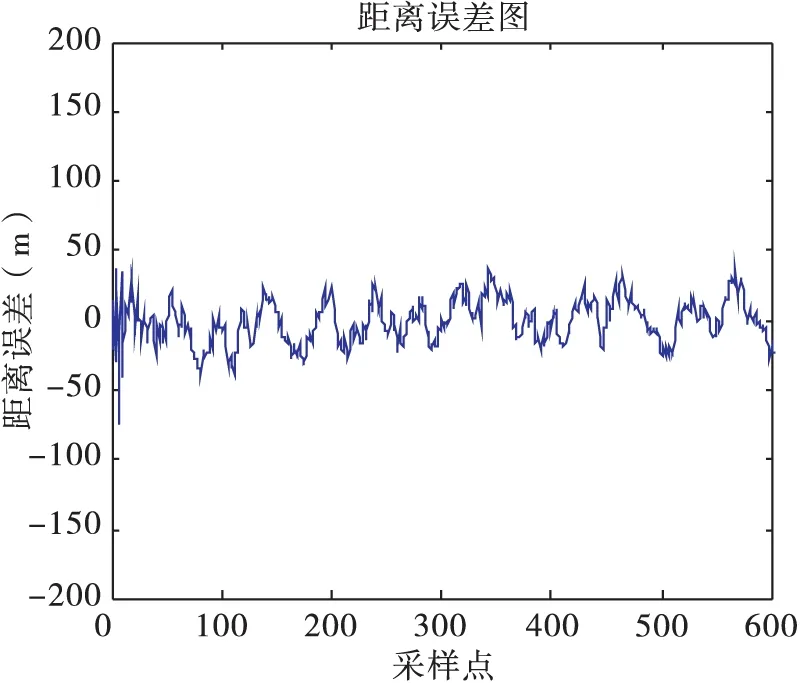
图7 径向距离误差图
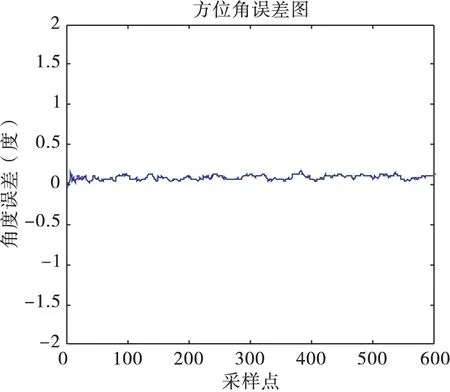
图8 方位角误差图
4 结束语
本文介绍了一个采用坐标转换实现空间数据对准,最近邻域法关联的机载雷达数据处理方法,实现了对多目标进行跟踪的实例。从仿真结果可以看出,该方法实现简单,应用灵活。标准化、模块化的设计架构符合“低耦合,高内聚”特点,可丰富仿真组件库,可逐步适应现代战争对雷达数据处理软件复杂化、智能化发展的要求,具有较高的工程实用价值。
[1] M.I Skolink. Introduction to Radar Systems[M] (third edition). McGram-Hill Book Co,2004.
[2] 杨万海. 雷达系统建模与仿真[M]. 西安:西安电子科技大学,2007.
[3] 贲德,韦传安,林幼权. 机载雷达技术[M]. 北京:电子工业出版社,2006.
[4] 丁鹭飞,陈建春. 雷达原理(第四版)[M]. 西安:西安电子科技大学出版社,2009.
[5] 张艳艳,董普靠等. 雷达数据处理软件模块化研究[J].火控雷达技术,2013,42(2):15-18.
[6] 王雪松,肖顺平,冯德军,赵锋等. 现代雷达电子战系统建模与仿真[M]. 北京:电子工业出版社,2010.
[7] 唐劲松,汤子跃等. 电子探测原理[M]. 北京:电子工业出版社,2013.
[8] 罗利强,张艳艳等. 雷达数据处理软件模块化研究[J].火控雷达技术,2013,42(2):38-41.
ModelingandSimulationofDataProcessingforAirbornePhasedArrayRadar
Lei Zhanghua, Xie Min
(Xi’an Electronic Engineering Research Institute, Xi’an 710100)
TN95
A
1008-8652(2017)02-095-05
2016-10-12
雷张华(1990-),女,硕士研究生。研究方向为微波技术。
