适用于超大规模三维地震层位自动追踪的双尺度洪水填充方法
2017-11-01陈茂山金瑞锋
陈茂山 张 雷 金瑞锋 王 飞
(①中国石油东方地球物理公司物探技术研究中心,河北涿州 072751;②中国石油东方地球物理公司研究院处理中心,河北涿州 072751)
适用于超大规模三维地震层位自动追踪的双尺度洪水填充方法
陈茂山*①张 雷②金瑞锋①王 飞①
(①中国石油东方地球物理公司物探技术研究中心,河北涿州 072751;②中国石油东方地球物理公司研究院处理中心,河北涿州 072751)
陈茂山,张雷,金瑞锋,王飞.适用于超大规模三维地震层位自动追踪的双尺度洪水填充方法.石油地球物理勘探,2017,52(5):1033-1041.
双尺度洪水填充是一种适用于超大规模三维地震层位空间自动追踪的方法。该方法从三个方面对经典洪水填充(Flood fill)算法进行扩展,即首先根据简单分块算法对三维地震工区进行分块并建立两级队列; 再根据种子点顺序进行区块编号并实施区块级洪水填充; 最后基于镶边分块算法对区块进行扩边并以区块为单位实施种子点级洪水填充。改进后的双尺度洪水填充法用“区块”和“种子点”两种尺度队列代替经典洪水填充法中的“种子点”一种队列,采用一致的四连通洪水填充法实现种子点扩散,在确保层位追踪的准确性和精度的前提下,显著降低了大规模或超大规模三维层位自动追踪对计算机资源的需求。
自动追踪 双尺度洪水填充 地震层位 超大规模 三维
1 引言
地震勘探中的构造解释,即根据地震反射特征从地震资料中提取地层的构造信息,是地震勘探的重要环节。长期以来,地震资料构造解释特别是层位解释费时费力[1],其工作量常常占到整个地震资料解释与分析阶段总量的50%以上,导致资料解释人员难以将更多的精力集中到油气储层识别上。
地震层位自动追踪是现代地震资料解释中最基础、最关键的技术之一,它直接表征一套解释系统在构造解释中的能力和效率。若拥有过硬的层位自动追踪技术,特别是基于计算机技术的层位自动识别与解释技术,就可大幅度地提高构造解释的精度和效率[2,3],并将从事地质综合研究所需的人力资源从繁琐的层位拾取中解放出来,将研究重心聚焦到储层分析与流体预测中。
相对于其他类型的地质、测井等数据而言,地震数据的最大特点是海量性。随着地震勘探技术的进步,三维地震勘探已替代二维地震勘探成为主流,地震工区的面积越来越大,采样间隔和道间距越来越小,特别是随着高密度、宽方位地震勘探技术的广泛应用,地震数据量成倍增长,传统的地震数据管理和存取机制难以适应这种变化,日趋成为地震数据处理和解释的瓶颈。
作为地震解释基础和核心功能之一,三维空间地震层位自动追踪对地震数据存取有一些特殊要求,主要表现在三个方面: ①在三维空间层位自动追踪过程中,因层位种子点通常是随机拾取,层位自动追踪的目标点不是严格按CMP序号大小顺序移动的,在一定程度上呈现出随机变化特征,导致三维空间层位自动追踪需对整个三维地震空间中的数据做随机抽取; ②由于三维空间层位自动追踪目标点的无序性,会出现地震数据的重复性抽取; ③三维空间层位自动追踪不仅对目标地震道做处理,还需对目标点周围多个相邻地震道进行多道处理,因此要求具备多道抽取能力。
从三维地震层位自动追踪对地震数据读取要求看,最理想的方式是将整个工区范围内的地震数据一次性读入计算机内存中,在内存中实现对地震数据的随机读取。针对二维层位自动追踪和单个剖面的三维层位自动追踪,由于对应的地震数据量不太大,所耗费的计算机内存有限,采用传统的一次性读入数据方式是可行的。但对于三维层位空间自动追踪,因其数据量巨大,所耗费的内存不可忽视,特别是随着高密度三维地震勘探技术的发展,工区面积越来越大、采样密度越来越高,三维层位的自动追踪对内存的消耗越来越大,因此还想一次性将整个工区全部的震数据装入内存难以实现。
基于以上原因,再加上现阶段海量地震数据随机存储和抽取的效率无法满足层位自动追踪高效性的要求,因此在保证层位自动追踪质量的条件下,寻找一种高效、可行的三维层位自动追踪方案是很有必要的。
2 原理与方法
地震勘探中的岩性界面通常是良好的波阻抗界面,即地震反射界面,这些反射界面构成了地震剖面。在地震剖面上,反射界面表现为一系列地震同相轴。这是由于相邻地震道之间的地震波形状相似且呈规律的变化,地震波的极值点(波峰或波谷所在点)常常具有一定的连续性并呈线状,通常称之为地震同相轴。因此,地震同相轴是地震记录中各个地震道上地震波相位相同的极值点的连线,一条地震同相轴对应于一个或多个相邻的地层界面。地震同相轴的起伏形态表征地层、流体等反射界面的产状和形态。基于此,对地震同相轴的追踪可视为对地震反射层位的追踪,同时也是对地层界面的追踪。
层位自动追踪是利用计算机和人工智能技术实现的,是地震资料构造解释的关键技术之一。层位自动追踪的基本过程为:在地震剖面上拾取一个或多个种子点,对种子点处的地震波形进行量化分析,然后根据地震同相轴的倾向和走向在每个种子点周围寻找相似的地震波形,并将相似程度较高的地震波形的同相点作为层位追踪点。
地震层位的形态与地层沉积模式密切相关。根据沉积理论,流体(包括水和大气)是沉积物搬运的动力和载体,流体运动是地层沉积的主要因素,在很大程度上控制着地层的形态和地层的岩性及物性。受地层沉积与流体运动关系的启发,地震层位自动追踪或许可采用流体动力学原理进行描述。事实上,不仅是地层层位的自动追踪,流体动力学思想早已被应用于图像处理领域,如用于骨架提取和图像分割的分水岭算法[4]、基于描述流体运动的Navier-Stokes方程的图像修复技术[5]等,还有最具代表性的洪水填充(Flood fill)算法[6, 7]。
洪水填充,又称种子点填充,是一种在图像处理中广泛应用的、在多维空间中确定连通区域的算法[6, 7]。洪水填充法既可用于区域填充,又可用于边界探测(也称为边界填充),已经成为最重要的图像处理基础技术之一。
洪水填充算法的基本原理是: 从某一枚种子点出发,依照一定规则判断种子点周围的目标点(像素点)是否与种子点一致或类似,以明确该点是否属于种子点所在的填充区域; 若是,则对该点进行填充,并将符合要求的目标点作为新的种子点纳入下一轮填充过程。显然,洪水填充模拟了流体的扩散过程。借鉴流体动力学理论,将三维空间的层位自动追踪过程看作一个流体运动过程,利用洪水填充法进行层位自动追踪则顺理成章。因此,洪水填充法可实现有效的种子点扩散填充,并已成功应用于动态目标识别[8]、空白区域填充[9]、地震层位自动追踪[10]和地质异常体探测[11]等领域。
3 经典洪水填充算法及其局限性
典型的洪水填充有四连通和八连通两种算法。四连通算法是指从图像中某点出发,通过对上、下、左、右四个方向像素点进行判断以确定是否对目标区域进行扩展(图1a)。八连通算法与四连通算法类似,沿着上、下、左、右、左上、右上、左下、右下等8个方向实现目标区域的扩展(图1b)。
针对二值图像,由于一个像素点既是四连通的,又是八连通的,四连通与八连通算法均适用于该类图像的区域填充。二者的区别在于所能填充的区域复杂度不同:四连通和八联通均能填充较简单区域(图1c中绿色圆点所围区域);八连通还能填充复杂的区域(图1d中绿色圆点所围区域),而四连通对此类区域则无能为力。
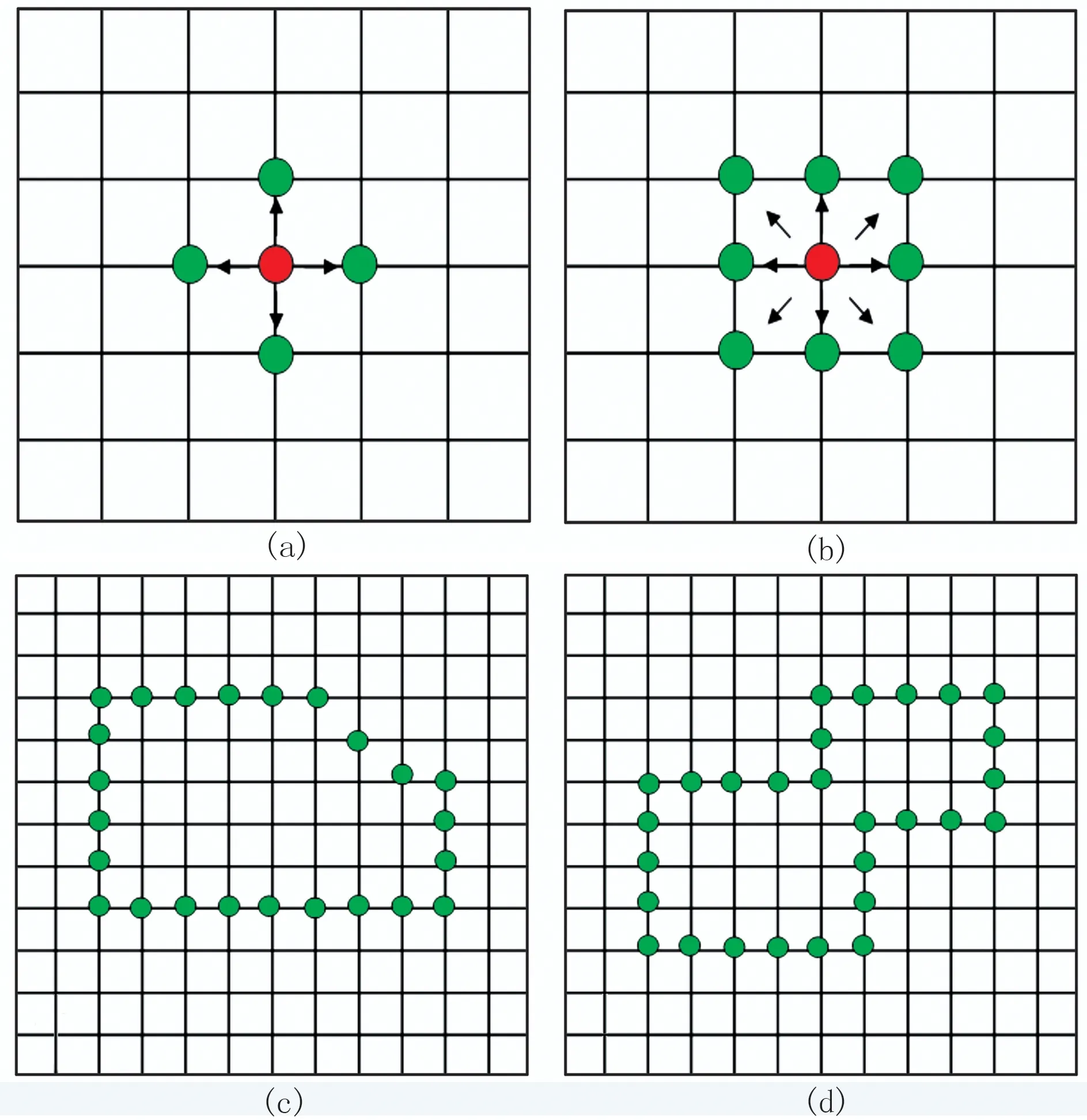
图1 四连通和八连通洪水填充示意图
传统的洪水填充采用递归算法。以四连通算法为例,采用该算法可简化洪水填充的实现过程。如果目标点颜色等于种子点颜色,则有
{
(1)将目标点颜色设置为种子点颜色;
(2)递归调用Flood-fill,填充右侧点;
(3)递归调用Flood-fill,填充上侧点;
(4)递归调用Flood-fill,填充左侧点;
(5)递归调用Flood-fill,填充下侧点;
}
递归法洪水填充简单易行,但当填充区域较大时,递归层次增多。因为函数的反复调用会使操作系统堆栈溢出,特别是由于地震数据量很大,会使堆栈溢出问题更严重; 其次,递归算法效率较低,多数节点需要被重复访问四次,递归调用函数的时间和空间耗费较大。
由于递归式洪水填充算法存在上述弱点,因此在二维图像处理中,常用扫描线法[6,7]代替递归法实现洪水填充。该算法用“线”方式代替“点”方式,充分利用图像相邻像素之间的相关性。考虑到区域在扫描线上和相邻扫描线之间的连贯性,进栈时仅选每一条连续未被填充的扫描线与多边形相交区间最左或右边的像素,出栈时填充整个区段,这样栈空间和递归次数就都大为减少了。
但遗憾的是,由于层位自动追踪与图像单色区域填充机理并不一致,层位自动追踪常常需用多个种子点,这与扫描线算法仅能使用一个种子点不一样,因此无论是递归法还是扫描线法都无法直接应用于层位自动追踪。
使用队列(Queue)代替递归法和扫描线法中仅使用一个种子点方式可弥补洪水填充法的上述不足。队列是一种计算机数据结构[12],其特点是“先进先出”,即只允许在后端进行插入操作、在前端进行删除操作,在具体应用中通常用链表或数组来实现。
但队列式洪水填充法仅解决了二维平面型区域填充过程中的堆栈溢出问题,并未显著降低由三维空间型区域填充带来的较大计算机内存消耗,特别是对三维海量地震数据来说更是如此。如一个由1000条主测线、1000条联络线组成的中等规模的三维地震工区,若每个地震道长度为4s,采样间隔为1ms,存储格式为4字节浮点数,则整个三维地震数据量超过15GB,无论是从计算机资源消耗还是一次性读入内存所耗费的时间上看,都将是难以忍受的。为了减少三维层位自动追踪过程中的内存消耗,以往常常用二维剖面追踪代替三维空间追踪。但这样的层位追踪方式会因无法满足三维层位追踪的空间随机性特点而影响层位追踪的质量。
为了解决洪水填充算法对海量数据的适应性问题,很多人尝试采用其他手段(如三维可视化像素雕刻[11]、小波变换[13]、高阶累积量[14]、蚁群搜索[15]等)回避这一问题,或直接面对大数据量问题采用减少数据量与数据存取量的方法(如数据压缩法[16]、随机读取数据法[17]、分块技术[18]等)。采用数据压缩技术可减小数据所占用的内存空间,但不可避免地,数据压缩和解压过程都需额外的计算机处理资源和时间;而如果直接对存储于硬盘中的图像进行像素级操作,则由于硬盘的读取速度无法与内存的读取速度相比,显然会影响图像的处理速度。与数据压缩方法和随机存取方法的实现思路不同,分块技术采用化整为零的方式将整个数据划分为很多小块,每一小块的数据量显著地小于整个数据的数据量。显然,如果将分块思想与洪水填充算法结合起来,可从根本上解决三维层位自动追踪中的海量数据存取与操作难题。
从以上分析可知,受计算机内部存储能力的限制,将三维地震资料这种海量数据一次性地载入内存难以实现。现实的做法是: 设定一个数据处理范围,只将当前处理范围内的数据载入内存,其他大部分数据存储在硬盘上; 再按某种顺序移动数据处理范围。该数据处理方式即分块处理技术,它对三维数据处理尤显重要。
4 分块洪水填充算法
尽管目前计算机运算能力和资源日益强大,但随着信息技术的发展,所获得的信息量迅猛增多,计算机资源的增长仍然相对滞后于数据量的增长,因此分块处理是海量数据处理中显著减小计算机资源消耗的有效途径。
对于二维图像这种数据来说,分块算法非常简单,仅需确定数据块的大小即可计算出数据块的数量。设X方向的数据块大小为dx,Y方向的数据块大小为dy,则对于一个nx×ny大小的图像,其总块数为
(1)
式中:xs和ys为0或1,即当nx或ny正好能被dx或dy完全分割时为0,否则为1。其表达式为
xs=(nx%dx==0?0∶1)
(2)
ys=(ny%dy==0?0∶1)
(3)
以图2所示的图像为例,如果横向像素数为58,纵向像素数为36,块尺寸为10×10(单位为像素数目), 则所划分的总块数为24。一般地,在地震层位自动追踪中块尺寸可设置为32×32~256×256 (单位为CMP点数)。
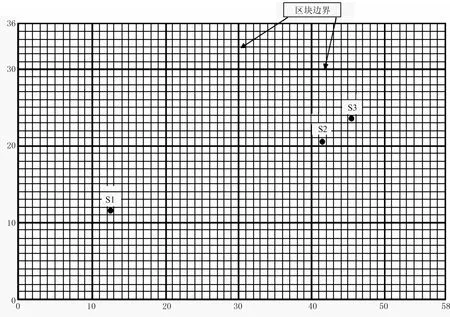
图2 二维图像分块方法
对于超大型二维图像来说,将分块技术与洪水填充算法结合起来,可解决计算机资源消耗过大的问题。先对图像进行分块,然后在每一个图像子块中进行洪水填充,这对单色图像填充是可行的,其效果与一次性洪水填充没有差别。不过,由于三维层位自动追踪机制不同于图像的颜色填充,这种方法仍然存在问题。
不同于图像颜色填充过程中只有一个种子点,三维层位自动追踪的种子点通常有很多个。把层位自动追踪过程视作流体的运动过程,层位自动追踪中的每个种子点都可看作是一个“水滴”。层位自动追踪的过程是,从这些种子点出发,逐渐向周围扩散和“浸染”,直至工区内所有CMP点被遍历完成并被赋予层位值。
三维地震层位自动追踪与图像颜色填充的另一个不同点在于,对一个目标点进行层位追踪,需要涉及该目标点周围一定区域(可称为目标点的邻域范围)内的地震道。这与图像颜色填充中仅需对种子点和目标点这两个点的像素值进行比较是不同的。
基于以上两个原因,要使分块洪水填充算法能够适应三维地震层位自动追踪,需要对其进行改造,即基于镶边分块算法使层位追踪的邻域范围包含在单个数据块之内,并使用双重循环的洪水填充法满足多种子点的层位自动追踪,保证这种层位自动追踪是真正的空间型追踪模式。
5 基于镶边分块算法的双尺度洪水填充法
双尺度洪水填充法是在经典洪水填充法基础上扩展而成的,它采用二级队列实现层位种子点的扩散和目标点遍历,既能在完全遵守经典洪水填充准则的条件下满足层位追踪的准确性要求,又能以较低的计算机资源占用满足超大规模三维地震层位自动追踪的高效性要求。双尺度洪水填充法从三个方面对经典洪水填充算法进行扩展,即首先基于规则分块算法对三维地震工区进行分块并建立两个队列; 再根据种子点顺序进行区块编号并实施区块级洪水填充; 最后基于镶边分块算法对区块进行扩边并以区块为单位实施种子点级洪水填充。
双尺度洪水填充法按下列具体步骤进行。
(1)区块划分。将整个三维工区按指定尺寸划分为一系列小块。根据地震数据的特点,区块尺寸通常设定为32×32~256×256,其单位为CMP点数。
(2)建立区块队列。首先根据种子点坐标统计非空区块(即区块中至少有一个种子点),将非零种子点区块中的第一个种子点在总种子点序列中的序号设定为该区块编号,并根据所划分的区块数量建立一个区块(一级)队列,按照区块编号从小到大将所有非零种子点区块加入到一级队列中,最后利用四连通洪水填充法按顺时针次序将零种子点区块加入到区块队列中(图3)。
(3)区块级洪水填充。根据种子点的坐标统计位于每个区块中的种子点数量,为每个非零种子点区块建立一个对应的种子点(二级)队列。
(4)种子点级洪水填充。首先设置区块扩边量,根据扩边量对区块实际范围进行“扩边”,即向四周扩大一定范围,以纳入有效种子点(图4)。如果将一个三维地震工区看作是一幅图像,层位追踪所必需的种子点是不均匀分布的,即无法保证每个区块都有种子点存在。如果一个区块中没有种子点,则层位自动追踪就无法进行。根据四连通洪水填充原理,由于与当前区块相邻的4个区块中至少有一个区块已经进行了追踪,因此可保证扩边后的当前区块中存在有效种子点。接着,将每个种子点坐标分配到相应区块中,并依种子点序号构建每个区块种子点队列; 然后,利用四连通算法实现种子点级洪水填充(图5)。
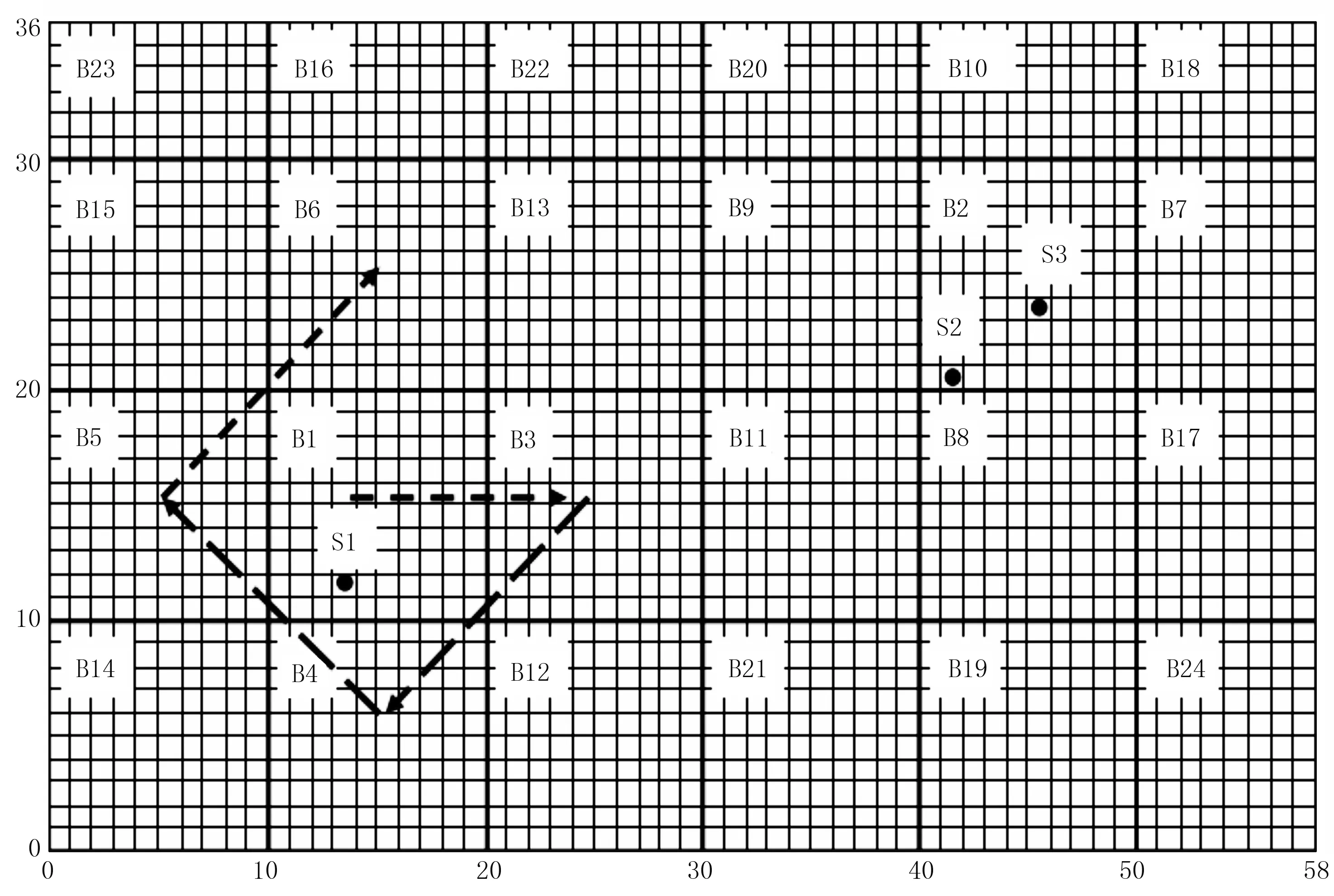
图3 区块编号方法
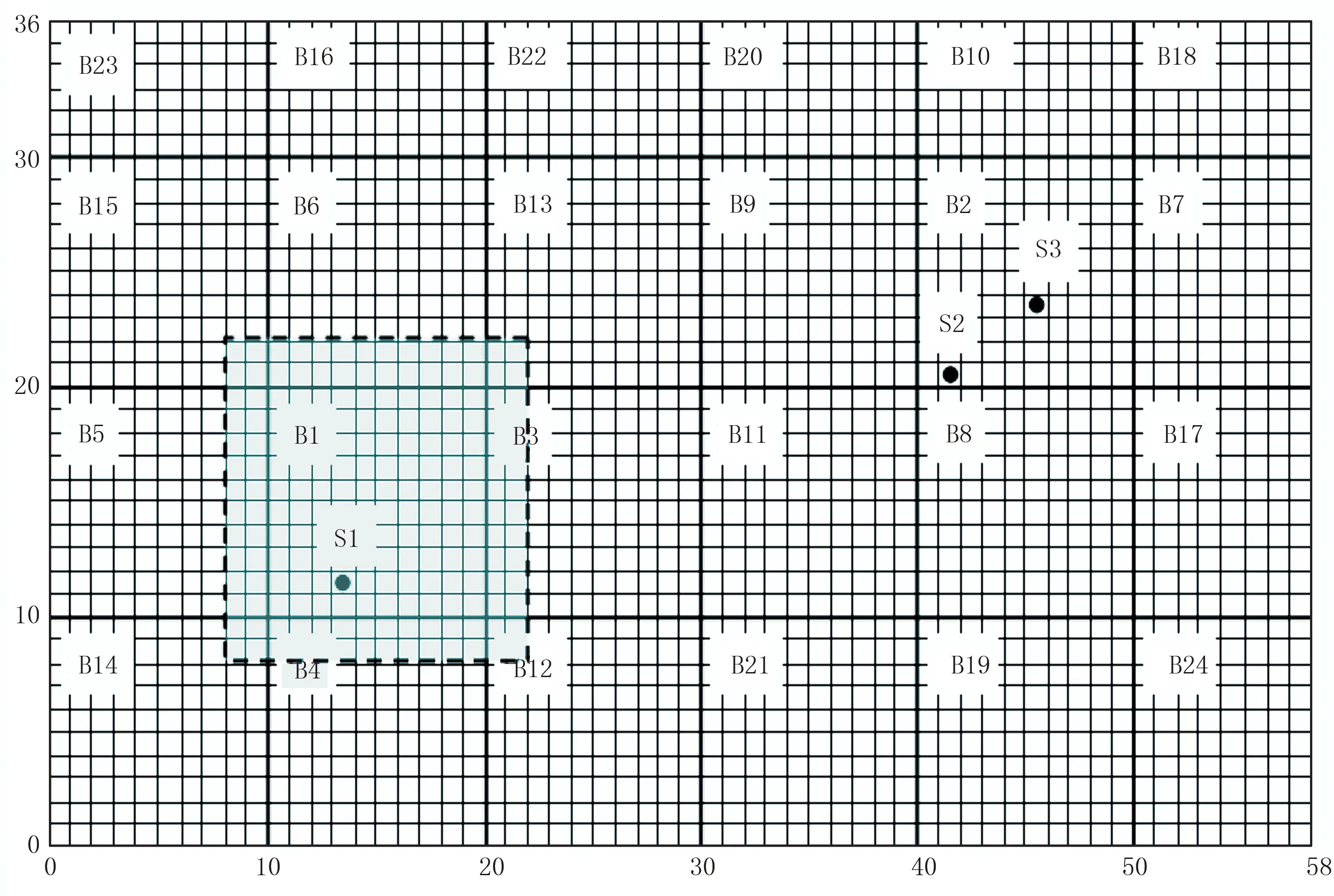
图4 区块镶边示意图

图5 种子点级洪水填充顺序
可见,双尺度洪水填充法用两级队列代替经典洪水填充法中的一个队列。相应地,完整的洪水填充过程包含两个尺度:第一尺度(区块级)填充和第二尺度(种子点级)填充。第一尺度为大尺度,第二尺度为小尺度。因此,将这种改进的洪水填充法称为双尺度洪水填充。
通过针对不同地区、不同地质条件的地震层位反复进行自动追踪试验,发现四连通和八连通洪水填充法的效果基本一致。经过深入分析,其原因在于层位自动追踪中种子点分布是稀疏的,基本不存在无法追踪的点。即使存在个别无法追踪的点,也可在后续处理中通过层位点插值方式进行补救。因此,在确保追踪效果的前提下,为了提高双尺度洪水填充的效率,在双尺度洪水填充中倾向使用四连通算法。
双尺度洪水填充法具有两大优点。首先,采用一致的四连通算法实现区块级和种子点级洪水填充可保证种子点顺序不发生显著改变,并严格按照先进先出原则对相应队列进行操作。其次,通过对区块实际范围进行“扩边”,可保证扩边后的当前区块中存在有效种子点,消除由于分块造成的边界效应,从而确保层位追踪的准确度和精度不会降低。
6 实例与效果
为了检验双尺度洪水填充法的有效性及其层位自动追踪效果,选取中国松辽盆地的TK3D工区的地震数据进行测试。TK3D工区共有1331条主测线和960条联络线(即在主测线方向有1331个CMP点,在联络线方向有960个CMP点)。该地震资料质量中等,地震反射特征较清晰,断层较发育。
首先,根据工区大小,设置区块尺寸为64×64(单位为CMP点数),据此将整个工区划分为315个区块,构建区块队列。接着,根据种子点坐标统计位于每个区块的种子点数量,为每个非零种子点区块构建对应的种子点队列。最后,采用一致的四连通算法实现第一尺度(区块级)和第二尺度(种子点级)洪水填充。在进行区块级填充时,对区块实际范围进行“扩边”。在本实例中,设置扩边量为3个CMP点。
图6为基于本文双尺度洪水填充法与采用其他解释系统提供的经典洪水填充法的层位追踪效果对比图,可见二者的符合率达到99%以上。
图7为采用双尺度洪水填充法所得的TK3D工区的T6层位自动追踪结果。可见具有层位点相位准确、层位起伏形态清晰等特点,且无空白点存在。这说明与经典洪水填充法的追踪结果相比,利用本文所提出的双尺度洪水填充法进行三维地震层位空间自动追踪是可行的和有效的。
此外,该区地震数据采样间隔为1ms,道长为4000ms。如果将整个地震数据载入内存,则占用内存近20GB。当采用分块算法时,镶边后的单个数据块所占内存仅为76MB。显然,在保证层位追踪质量的情况下,双尺度洪水填充法还大大节省了内存空间。
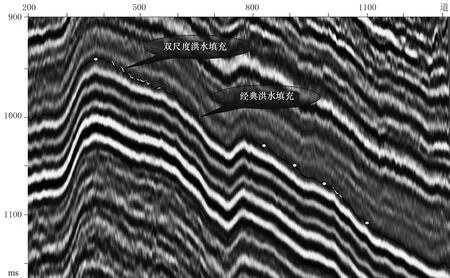
图6 经典洪水填充(白色层位)与双尺度洪水填充(黑色层位)追踪效果对比

图7 TK3D资料T6层位双尺度洪水填充法三维层位自动追踪效果
7 结论
双尺度洪水填充是经典洪水填充算法的一种扩展,是将分块处理思想与经典洪水填充算法进行融合而得到的。它基于分块思想对三维地震工区进行区块划分,采用大尺度的区块级队列和小尺度的种子点级队列实现三维层位的自动追踪。由于采用了一致的四连通算法实现区块级和种子点级的洪水填充,并利用镶边分块算法消除由于分块而引起的边界效应;双尺度洪水填充保证了层位追踪过程中种子点顺序不发生显著改变,确保了层位追踪的准确度和精度不会降低。
基于双尺度洪水填充方法的三维层位自动追踪的应用实例表明,该方法能在显著降低计算机资源需求的前提下实现层位自动追踪,层位自动追踪的精度与经典洪水填充法一致,所获得的层位质量可靠,且层位自动追踪的效率没有降低。
总之,双尺度洪水填充法既能在完全遵守经典洪水填充准则的条件下满足层位自动追踪的准确性要求,又能以较低的计算机资源占用满足超大规模三维地震层位自动追踪的高效性要求。利用该方法可实现大规模或超大规模三维地震的层位自动追踪。
[1] Hoyes J and Cheret T.A review of “global” interpretation methods for automated 3D horizon picking.The Leading Edge,2011,30(1):38-47.
[2] Herron D.Horizon autopicking.The Leading Edge,2000,19(5):491-492.
[3] 施尚明,刘晓文,张景军等.复杂地区三维地震资料高效解释方法研究.石油地球物理勘探,2015,50(5):936-941. Shi Shangming,Liu Xiaowen,Zhang Jingjun et al.3D seismic data high efficiency interpretation in complex areas.OGP,2015,50(5):936-941.
[4] 杨家红,刘杰,钟坚成等.结合分水岭与自动种子区域生长的彩色图像分割算法.中国图形图像学报,2010,15(1):63-68. Yang Jiahong,Liu Jie,Zhong Jiancheng et al.A color image segmentation algorithm by integrating watershed with automatic seeded region growing.Journal of Image and Graphics,2010,15(1):63-68.
[5] 李率杰,李鹏,冯兆永等.基于Navier-Stokes方程的图像修复算法.中山大学学报(自然科学版),2012,51(1):9-13. Li Shuaijie,Li Peng,Feng Zhaoyong et al.A new algorithm for large in painting based on the Navier-Stokes Equation.Journal of Sun Yatsen University (Natural Science Edition),2012,51(1): 9-13.
[6] 孙家广.计算机图形学(第三版).北京:清华大学出版社,1998. Sun Jiaguang.Computer Graphics (Third Version).Tsinghua University Press,Beijing,1998.
[7] Shirley P,Ashikhmin M and Marschner S.Fundamentals of Computer Graphics (Third Edition).CRC Press,2009.
[8] 陈佳鑫,贾英民.一种基于漫水填充法的实时彩色目标识别方法.计算机仿真,2012,29(3):4-10. Chen Jiaxin,Jia Yingmin.Real-time color object re-cognition method based on flood fill algorithm.Computer Simulation,2012,29(3):4-10.
[9] Tremeau A,Borel N.A region growing and merging algorithm to color segmentation.Pattern Recognition,1997,30(7):1191-1203.
[10] Chen M,Zhan S,Wan Z et al.A dip-spreading method for horizon tracking based on plane-wave destruction technique.SEG Technical Program Expanded Abstracts,2012,31:864-868.
[11] Sheffield T,Bulloch T,Meyer D et al.Geovolume visualization and interpretation:speed and accuracy with auto-tracking.SEG Technical Program Expanded Abstracts,2003,22:2406-2409.
[12] 严蔚敏,吴伟民.数据结构.北京:清华大学出版社,1997. Yan Weimin,Wu Weimin.Data Structure.Tsinghua University Press,Beijing,1997.
[13] 刘伟,曹思远.基于小波变换的信号奇异性检测在层位识别中的应用.石油地球物理勘探,2010,45(4):530-533. Liu Wei and Cao Siyuan.Application of wavelet transform-based signal singularity detection in horizon identification.OGP,2010,45(4):530-533.
[14] 冯智慧,刘财,冯晅等.基于互四阶累积量一维切片的地震层位自动拾取方法.石油地球物理勘探,2011,46(1):58-63. Feng Zhihui,Liu Cai,Feng Xuan et al.An automatic seismic horizon picking-up method based on one dimensional slice of cross fourth order cumulant.OGP,2011,46(1):58-63.
[15] 殷文,李援,郭加树等.基于改进蚁群追踪策略的地震层位自动识别方法.石油地球物理勘探,2017,52(3):553-561. Yin Wen,Li Yuan,Guo Jiashu et al.Seismic horizon automatic identification based on ant colony tracking strategy.OGP,2017,52(3):553-561.
[16] 赵利平,肖德贵,李肯立等.一种高效体数据压缩算法及其在地震数据处理中的应用.计算机辅助设计与图形学学报,2009,21(11):1606-1611. Zhao Liping,Xiao Degui,Li Kenli et al.An efficient algorithm for large-scale volume data compression and its application in seismic data processing.Journal of Computer-aided Design and Computer Graphics,2009,21(11):1606-1611.
[17] 马承杰.地震数据访问技术研究.石油工业计算机应用,2005,23(4):5-7. Ma Chengjie.Research on the techniques for access the seismic data.Computer Applications of Petroleum,2005,23(4):5-7.
[18] 吴承兵,夏禹.分块结构在三维地震数据处理中的应用.中国西部科技,2010,9(15):19-20. Wu Chengbing,Xia Yu.The use of block structure in the three-dimensional seismic data processing.Science and Technology of West China,2010,9(15):19-20.
(本文编辑:朱汉东)
陈茂山 教授级高级工程师,1966年生; 1990年本科毕业于石油大学勘查地球物理专业,1999年获中国石油大学(华东)地球探测与信息技术专业硕士学位,2010年获中国地质大学(北京)能源地质工程专业博士学位; 一直从事石油地球物理勘探方法研究与软件开发; 现在中国石油集团东方地球物理公司物探技术研究中心从事地震解释新技术新方法研究与GeoEast地震处理解释一体化系统研发。
1000-7210(2017)05-1033-09
P631
A
10.13810/j.cnki.issn.1000-7210.2017.05.017
*河北省涿州市中国石油东方地球物理公司物探技术研究中心,072751。 Email:chenmaoshan@cnpc.com.cn
本文于2016年11月28日收到,最终修改稿于2017年8月16日收到。
本项研究受中国石油天然气股份有限公司重大科技专项项目“大型地震处理解释软件平台开发与集成”子课题“叠前储层预测与沉积层序解释软件研发与集成”(2016E-1004)资助。