基于模型约束的速度谱自动解释策略与方法
2017-11-01刘百红宋志翔赵改善孙成龙
刘百红, 宋志翔, 赵改善, 孙成龙
( 中国石化 石油物探技术研究院,南京 211103)
基于模型约束的速度谱自动解释策略与方法
刘百红, 宋志翔, 赵改善, 孙成龙
( 中国石化 石油物探技术研究院,南京 211103)
针对目前的速度谱解释是采用手工交互的方式,耗时费力,提出了一种基于叠加速度谱的自动叠加速度拾取策略与方法。首先是由CMP道集计算叠加速度谱,然后根据实际情况选择叠加速度模型函数,并通过拟合的方法,由速度谱确定出叠加速度模型函数中的系数,从而获得全部CMP点上的叠加速度模型函数,进而构建出初始速度模型。根据初始速度模型中速度分布,选择合适的种子点,并在种子点上进行人工拾取,再由拾取点插值形成种子点上的速度函数。最后在种子点上的速度函数约束下对速度谱进行自动解释拾取,从而实现速度谱快速、高效地自动拾取。
地震勘探; 叠加速度; 均方根速度; 速度谱; 自动拾取
0 引言
在地震资料处理初期,一般都没有合适的速度模型,必须通过常规的速度分析来获得叠加速度,而且都是将叠加速度等同于均方根速度,并以此来进行动校叠加,得到叠加剖面或者进行叠前时间偏移,或者基于均方根速度模型进行时深转换并进一步进行偏移速度分析。
叠加速度分析的精度受制于地震勘探的条件和观测资料的信噪比,在速度谱上表现出多解性和模糊性,因此,速度谱地解释基本是采用人机交互模式,这也是目前常规地震资料处理中人工操作量最大的一个环节。因此,速度自动解释方法也不断推出,这些方法一般都是基于全局优化算法(如基于蒙特卡洛方法[1]等)。这类方法具有算法易于设计,对目标函数要求不高从而应用广泛,但效率低,不能保证产生优化问题的最优解。另外一些是基于局部寻优的方法(包括牛顿法、共扼梯度法、神经网络方法[2-6]等)。这类方法虽然有较高的计算效率,但往往需要利用导数为寻找极值点提供有效信息。因此,这些方法也仅仅是处在科学研究阶段,在实际工业化应用中仍然主要采用人机交互模式进行速度谱地解释。
笔者提出了一种基于模型约束的速度谱自动解释策略与方法,这种方法不需要设置目标函数,直接对速度谱进行搜索,并且可以用一些先验信息来对搜索进行约束,从而使得自动解释的速度更加合理。
1 基本原理
1.1 计算速度谱
利用地面地震叠前数据:CMP(共中心点)道集数据产生速度谱。速度谱可以是相似谱,也可以是互相关谱。对于一个CMP道集数据,其速度谱的形式如式(1)所示。
S(t,Vrms(t))
(1)
其中:t为时间;vrms是均方根速度;S(t,Vrms(t))表示在(t,vrms)处的速度谱。
1.2 自动计算初始速度模型
引入速度模型函数,来源可以有两种方式。
1)速度函数曲线,可以采用式(2)的速度函数[7-8]。
vrms=v0+α·tβ
(2)
其中:v0是时间为零时的地层的均方根速度;α、β为待定系数。该速度模型函数适用于大多数地质情况。对于具体某个地区的某一次采集到的地震数据而言,v0、α、β为待定系数。确定这些系数需要利用速度谱,具体做法是,沿时间轴遍历拣选速度谱上使谱能量S最大的vrms(t),然后用这些vrms(t)去拟合公式(2)来获得v0、α、β。在通常情况下,人工或者自动拾取方法都是得到使谱能量S最大的vrms(t)就停止了,而笔者仅仅是将其作为一个初始值,而且不需要人工拾取。使用时也可以指定种子点,以获得种子点上的速度模型函数。除了可以根据不同地区选择不同表达形式的速度模型函数以外,还可以根据工区内已知速度分布情况指定v0、α、β的搜索范围。采用速度函数拟合的方式,可以保持速度的变化趋势,但是由于是拟合,因此,确定系数后的速度函数并不能保证严格通过谱能量最大的点。
1.3 种子点初始速度函数构建
选择一些具有代表性的CMP点作为种子点,进行人工拾取,并对每个种子点上的拾取结果沿时间轴进行插值,获得相应种子点上的速度函数,作为各种子点初始的速度模型函数。种子点处的速度函数应该具有一定的代表性,并且种子点处的速度谱的拾取应该尽量精细。
1.4基于种子点初始速度函数约束的自动速度拾取
利用种子点处插值形成的速度模型函数作为约束,按照速度谱拾取原理自动从速度谱上拾取速度。这个约束首先表现在空间范围,即可以将一个种子点的初始速度模型函数用于约束所有点的自动拾取,也可以指定其约束范围。其次,这个约束表现在时间轴方向,即对每个点沿时间轴进行约束。约束方法就是设置每个时间点处叠加速度的上下限。例如,对于速度模型函数vrms(t),可以将拾取点处的速度的上下限设置为:
(3)
其中:λl、λu分别为上下限阀值。
也可以将约束形式设置为:
(4)
其中:δlrms、δurms分别为上下限的扰动值。
然后在此约束下,沿时间轴自动搜索并拾取谱能量最大的点,以完成速度模型函数约束下的速度谱自动拾取。在种子点速度函数约束下进行自动速度拾取既可以对拾取点个数进行限制,也可以对拾取点的时间间隔进行设置。这可以通过以下策略实现。
首先将所有未访问的点标示为“0”,将已访问过但是未通过检测的点标示为“1”,将已访问过并且通过检测的点标示为-1。搜索时,是从速度谱上能量最大的点作为初始点开始搜索,并首先将其标示为-1;一种搜索方式是从此点开始以一定的步长分别向上、向下到下一个时间点,找到这些时间点上谱能量最大的点,并将其标示为-1,然后再依次以一定步长到下一个时间点进行搜索,直到向上到时间轴零点,向下到时间轴终点。这种搜索方式拾取的点均匀分布,并且不回头,即只进行一次搜索,所以效率较高,但是有可能拾取不到谱能量大的点。为此采用另一种搜索策略是,从初始点开始先分别向上、向下检测,看是否有比初始点能量更大的点,如果有,则将其标示为-1,如果没有则本轮搜索完毕,然后进行下一轮搜索。第二轮搜索是寻找谱能量最大并且标示为“0”的点,为了避免这两轮的点在时间上是紧密相邻的,可以在每一轮搜索完毕后,将通过检测的点附近一定距离的点标示为“1”。在这种策略下,需要设置搜索次数,即需要搜索多次,因此效率不高,但是通常能拾取到谱能量比较大的点,与人工拾取的思路一致。
2 应用实例
数据来源于我国南方某工区。图1是该工区某个CMP点的速度谱以及由公式(2)获得的该CMP点的均方根速度函数曲线。在计算完速度谱以后,根据速度谱可以设置公式(2)中的v0为4 km/s,而α、β的起始值均设置为0.1,三个参数均搜索10次,最后得到该CMP点的均方根速度函数曲线。由图1可见,该速度函数基本可以反映当前CMP点的速度变化趋势,但是却并不是很精确。因此还需要由此构建初始的均方根速度模型,并进一步利用此速度模型得到相应个CMP道集的NMO结果及总体初步叠加结果来选择适当的CMP点作为种子点,然后在种子点上人工拾取速度函数。
图2为种子点上的速度谱及人工拾取的速度函数,及在此速度函数约束下进行速度谱自动拾取的结果。红色的曲线为人工拾取的速度函数,它是由人工拾取的若干离散点插值得到。绿色星号为在速度函数约束下自动拾取结果,可见自动拾取结果基本能满足实际需求。

图1 单个CMP点上的速度谱及公式(2) 拟合后的速度函数曲线Fig.1 The semblance of a CMP gather and the fitted velocity function using the model function (2)
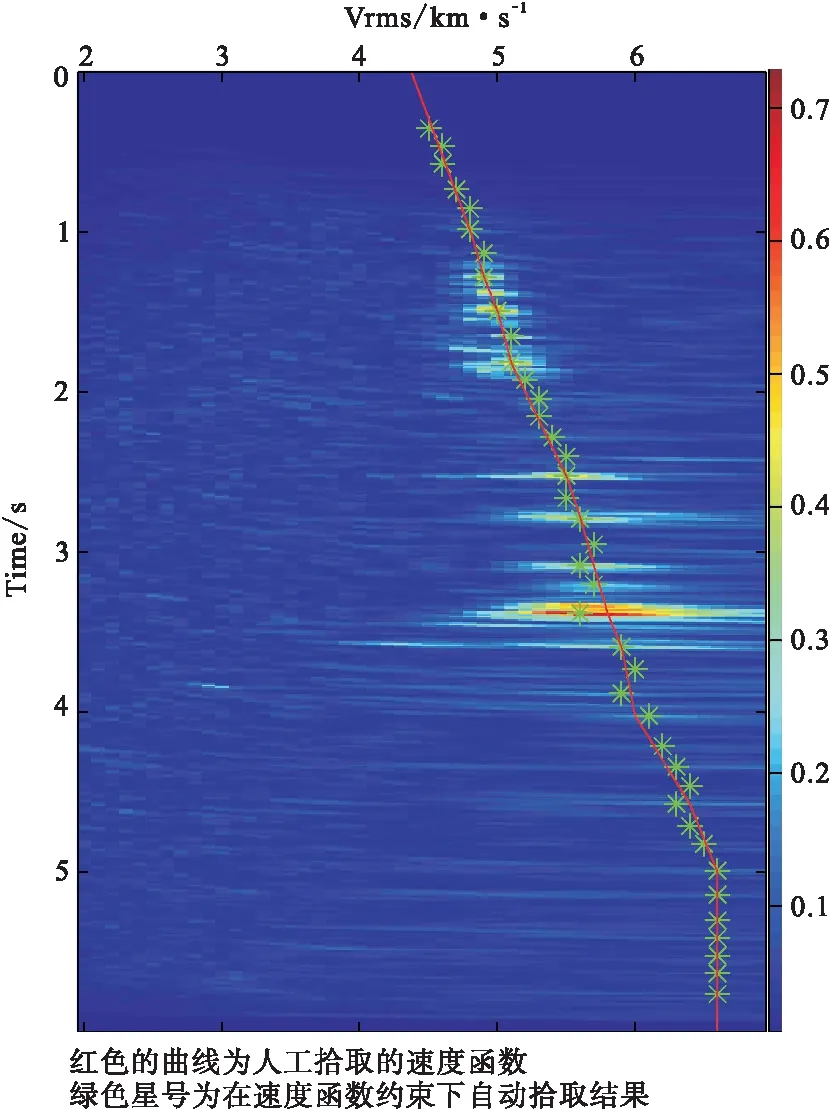
图2 种子点上速度谱及人工拾取的速度函数以及在此速度函数约束下的自动拾取结果Fig.2 Velocity function picked manually at seed point and the automatic picking by the constrained of the function
3 结论
笔者提出了一种基于叠加速度谱的自动叠加速度拾取策略与方法,并用实际资料进行了试验。根据该策略与方法,除了需要一些参数选择、少数种子处人工拾取需要人工干预以外,整个过程都是自动进行,这大大减少了速度谱拾取环节的人工与用时,同时从拾取效果也基本能满足实际需求。
[1] 张正和,吴清岭,张海燕.蒙特卡洛法速度谱的自动拾取[J]. 大庆石油地质与开发,2002,121(3):79-80.
ZHANG Z H, WU Q L, ZHANG H Y.Automatic velocity picking from stack velocity spectrum by Monte Carlo non-linear optimization[J].Petroleum Geology & Oilfield Development in Daqing,2002,121(3):79-80.(In Chinese)
[2] 王立新.自动拾取叠加速度及提取偏移速度方法[J].石油物探,1999,138(4):107-133.
WANG L X. Methodology of automatic picking stack velocity and extracting migration velocity[J].Geophysical Prospecting for Petroleum,1999,138(4):107-133. (In Chinese)
[3] 查朝阳.利用神经网络拾取叠加速度[J].石油地球物理勘探,1996,131(6):892-897.
ZHA C Y.Stack velocity pickup using neural network[J]. Oil Geophysical Prospecting, 1996,131(6):892-897. (In Chinese)
[4] CARLOS CALDERON-MACIAS,MRINAL K.SEN,PAUL L.STOFFA.Automatic NMO correction and velocity estimation by a feed forward neural network[J].Geophysics,1998,163(5):1696-1701.
[5] 林年添,刘洪,李桂花.用于速度自动拾取的路径积分优化法与光顺处理技术[J].地球物理学报,2013,156(1):246-254.
LIN N T, LIU H, LI G H. Auto-picking velocity by path-integral optimization and surface fairing[J]. Chinese J. Geophys ,2013,156(1):246-254.(In Chinese)
[6] 林年添,刘洪,李建勇.基于Viterbi算法的复杂地质体速度约束化自动拾取[J]. 地球物理学进展,2004,119(2):311-316.
LIN N T, LIU H, LI J Y. Automatic picking velocity by the viterbi algorithm for the complex geological case[J]. Progress In Geophysics,2004,119(2):311-316. (In Chinese)
[7] DAVID E.LUMLEY. Monte Carlo automatic velocity picks[R]. SEP reports 75,1997:1-25.
[8] LIN Z.Automatic picking and its applications[R].SEP reports 70,1997:1-20.
[9] DIX C.H. Seismic velocities from surface measurements[J].Geophysics, 1995,120(1:)68-86.
[10] AHMED M. ALMARZOUG,FERHAN Y.AHMED. Automatic Seismic Velocity Picking[C].SEG Annual Meeting Expanded Abstracts,2012.
Automaticvelocitypickingstrategyandmethodwithmodelconstrained
LIU Baihong, SONG Zhixiang, ZHAO Gaishan, SUN Chenglong
(Sinopec Geophysical Research Institute, 219 Shanggao Road, Jiangning District, Nanjing 211103,China)
Conventional manual velocity picking in semblance is time consuming and requires a great deal of manual work. A strategy and method of automatic pick velocity from velocity semblance is proposed. Given a single velocity semblance, the RMS velocity was computed as the global best fit to the velocity semblance using monte carlo random fitting method. A initial RMS velocity model can be built with all the RMS velocity function at each CMP calculated. Next, some CMP points can be selected as seeds from the initial RMS velocity model to perform deliberate velocity picking manually. Then an automatic velocity picking can be done constrained by the velocity function that picked at seeds. This method makes velocity picking timesaving and labor-saving.
seismic exploration; stacking velocity; RMS velocity; velocity semblance; automatic picking
P 631.4
A
10.3969/j.issn.1001-1749.2017.05.08
2016-09-10 改回日期: 2016-10-31
国家科技重大专项(2016ZX05018007)
刘百红(1971-),男,硕士,高级工程师,研究方向为地震资料处理、解释方式、正反演方法,E-mail:Liubaihongfirst@163.com。
1001-1749(2017)05-0632-04