线性自抗扰控制器在PCR仪温控系统中的应用
2017-11-01刘宏利
邵 磊 何 涛 李 季 刘宏利 韩 雪
(天津理工大学自动化学院天津市复杂系统控制理论及应用重点实验室)
线性自抗扰控制器在PCR仪温控系统中的应用
邵 磊 何 涛 李 季 刘宏利 韩 雪
(天津理工大学自动化学院天津市复杂系统控制理论及应用重点实验室)
实时荧光聚合酶链反应(PCR)仪在扩增基因检测过程中,外界干扰对反应温度的细微变化容易影响测试结果,针对该要求设计一种线性自抗扰控制器,通过实时估计温度变换中的各种内外扰动,采用特殊的线性反馈机构给予补偿,减少过程中受到扰动的影响。
自抗扰控制器 PCR仪 扰动 补偿
实时荧光聚合酶链反应(PCR)是一种体外核酸扩增技术,将所要研究的目的基因或某一DNA片段于数小时内扩增至百万倍,使肉眼能直接观察和判断。PCR扩增温度控制系统是基因检测的一个关键控制环节,超出预定温度的变化范围都可能致使试验结果出现差别,不仅对温度控制的精确度和响应速度有较高要求,而且对试验过程中的不确定内外扰动有很强的抗扰作用。试验中,如果退火阶段受到干扰,可能出现退火温度过高,降低扩增效率;如果高温变性阶段受到干扰,极有可能出现假阴性情况。因此,温度控制中的干扰是亟待解决的问题[1,2]。韩京清提出的自抗扰控制(Active Disturbance Rejection Control,ADRC)技术是一种基于扩张状态观测器的新型实用的非线性控制技术,该技术是由PID控制器演变过来的,并采取了PID误差反馈控制的核心理念,同时将系统中的未建模部分(内扰)和影响输出的外部扰动(外扰)统合为系统的总扰动,并视为系统的扩张状态,通过观测器来估计总扰动并实时调整控制量,从而消除扰动对输出的影响[3,4]。但这种自抗扰算法调节参数过多且过程比较繁琐,为了解决这一问题,Zheng Q等将线性化和带宽概念引入ADRC,提出了线性自抗扰控制,并论证了线性扩张状态观测器(ESO)的收敛性和线性自抗扰控制器(LADRC)的稳定性,令控制器带宽和观测器带宽成比例,这样需要整定的参数变得很少,便于工程实现和调整[5~7]。
笔者将LADRC运用到PCR仪的温度控制中,首先分析PCR仪温度变换中各阶段温度的控制范围与受外界干扰的影响,设计线性二阶自抗扰控制器,采用线性观测器将内外扰动归为总扰动并予以补偿,并实时调整输出量,减少干扰对试验的影响,同时与经典PID控制器进行比较,验证该控制器处理内外干扰问题的优势。
1 PCR仪温度控制
1.1 PCR温度变换过程
PCR仪温度变换试验中包括高温变性、低温退火和适温延伸3个阶段。在标准反应中包括3种温度变换,双链DNA在90~95℃变性,再迅速冷却至40~60℃,引物退火并结合到靶序列上,然后快速升温至70~75℃,在Taq DNA聚合酶的作用下,使引物链沿模板延伸。
达不到变性温度就不会产生单链DNA模板,PCR也就不会启动。变性温度低则变性不完全,DNA双链会很快复性,因而减少产量。但温度不能过高,因为高温环境对酶的活性有影响,在此步骤如果不能使靶基因模板或PCR产物完全变性,就会导致PCR反应失败,一般DNA变性温度在90~95℃范围内选取,样品一旦达到此温度宜迅速冷却到退火温度。
退火温度是影响PCR特异性的较重要因素。变性后温度快速冷却至40~60℃,使引物和模板结合。由于模板DNA比引物复杂得多,引物和模板之间的碰撞结合机会远高于模板互补链之间的碰撞。温度高特异性强,但过高则引物不能与模板牢固结合,DNA扩增效率下降;温度低产量高,但过低会造成引物与模板错配,非特异性产物增加。
引物延伸温度的选择取决于Taq DNA聚合酶的最适温度,一般取70~75℃,在72℃时酶催化核苷酸的标准速率每秒可达35~100个。过高的延伸温度不利于引物和模板的结合[8]。
1.2 温度控制算法
PCR检测方法对反应过程的温度控制有着极高的要求[9]。目前,国内外在PCR仪中使用的温度控制算法有直接数字控制(DDC)、先进PID控制、预测控制以及模糊控制(Fuzzy)等。这些方法在控制精度和动态响应变化上也在逐渐改进驱于成熟,但由于负载的发热功率、风道气流、加热腔体吸放热与加热腔内部存在不确定的干扰因素,再加上环境温度的影响,会造成某些不确定的内外扰动,因此对控制方法提出了更高的要求。采用LADRC技术,在保证控制精度要求和响应速度的同时,可以实时估计内外不确定扰动总和,消除扰动对输出的影响,提高了PCR检测的准确性,也提高了仪器的整体性能。
2 自抗扰控制器的设计
2.1 自抗扰控制器模型
自抗扰控制器是一种新型控制器,典型的自抗扰控制器模型如图1所示,主要由跟踪微分器(Tracking Differentiation,TD)﹑扩张状态观测器(Extended State Observer,ESO)和非线性误差反馈规律(Nonlinear State Error Feedback,NSEF)3部分构成,其核心是ESO。对于设定值v(t),TD安排过渡过程v1并给出过程的微分信号v2,e1和e2为过渡过程v1和系统估值z1之间的误差及其微分;u(t)为系统的控制量;y(t)为系统的输出量,z1﹑z2能很好地跟踪对象输出y(t)及其微分;z3估计出对象扰动的总和;w(t)为外扰[10]。
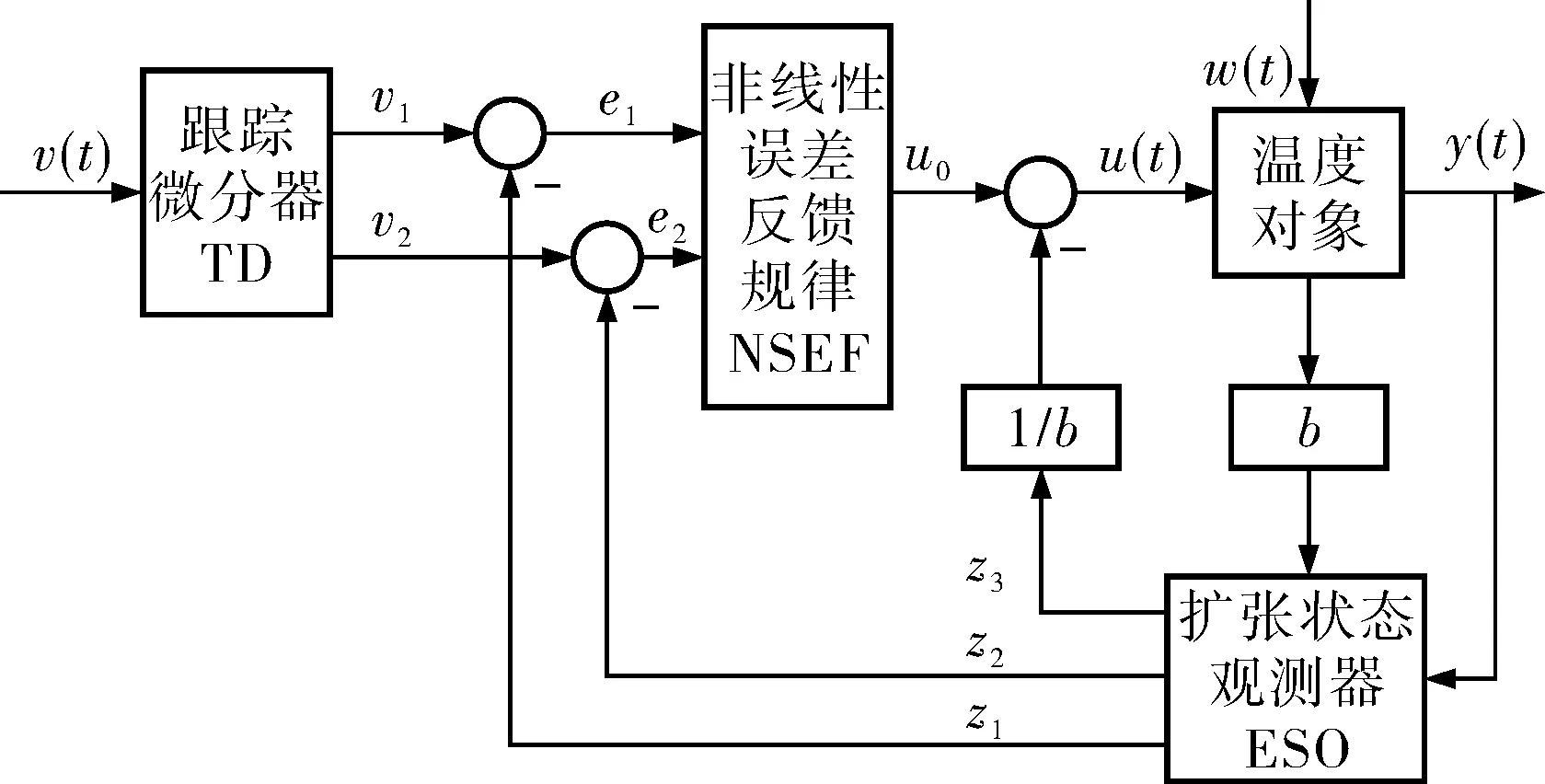
图1 典型的自抗扰控制器模型
2.2 线性自抗扰控制器(LADRC)
在解决实际问题时,由于非线性函数的存在,使得控制器参数很多,不易调试,在输出的量测环节不可避免地会引入噪声干扰,而采用LADRC,不仅可以将这些噪声并入总抗扰,同时所调节参数也不多。
LADRC省去了跟踪微分器,而ESO和NSEF也都采用了线性函数,构成了简化的自抗扰控制器,这里以二阶系统为例,其结构框图如图2所示,其中kd为控制器带宽。

图2 二阶LADRC结构框图
以二阶系统为被控对象,有:
(1)
式中b0——相对增益(模型输入信号的系数);
t——时间函数;
u——输入信号;
w——扰动信号;
x——状态量;
x′——输入信号的一阶导数;
x″——输入信号的二阶导数;
y——输出。
将式(1)变为状态空间方程形式:
Bs=[0b00]T
Cs=[1 0 0]
D=[0 0 1]T
其中f′为系统总扰动估计值,x=[x1,x2,x3]T为状态向量,x1=x,x2=x′,x3=f′。
采用线性ESO,有:
(2)


C=I3×3
D=03×3
对于二阶系统,通过调整kd、b0和w0来保证整个系统的稳定[11]。
3 PCR仪温度仿真
对于某PCR温度控制系统,将测温、内部变化和执行机构等效为传递函数[12],即:

搭建Simulink模型如图3所示。
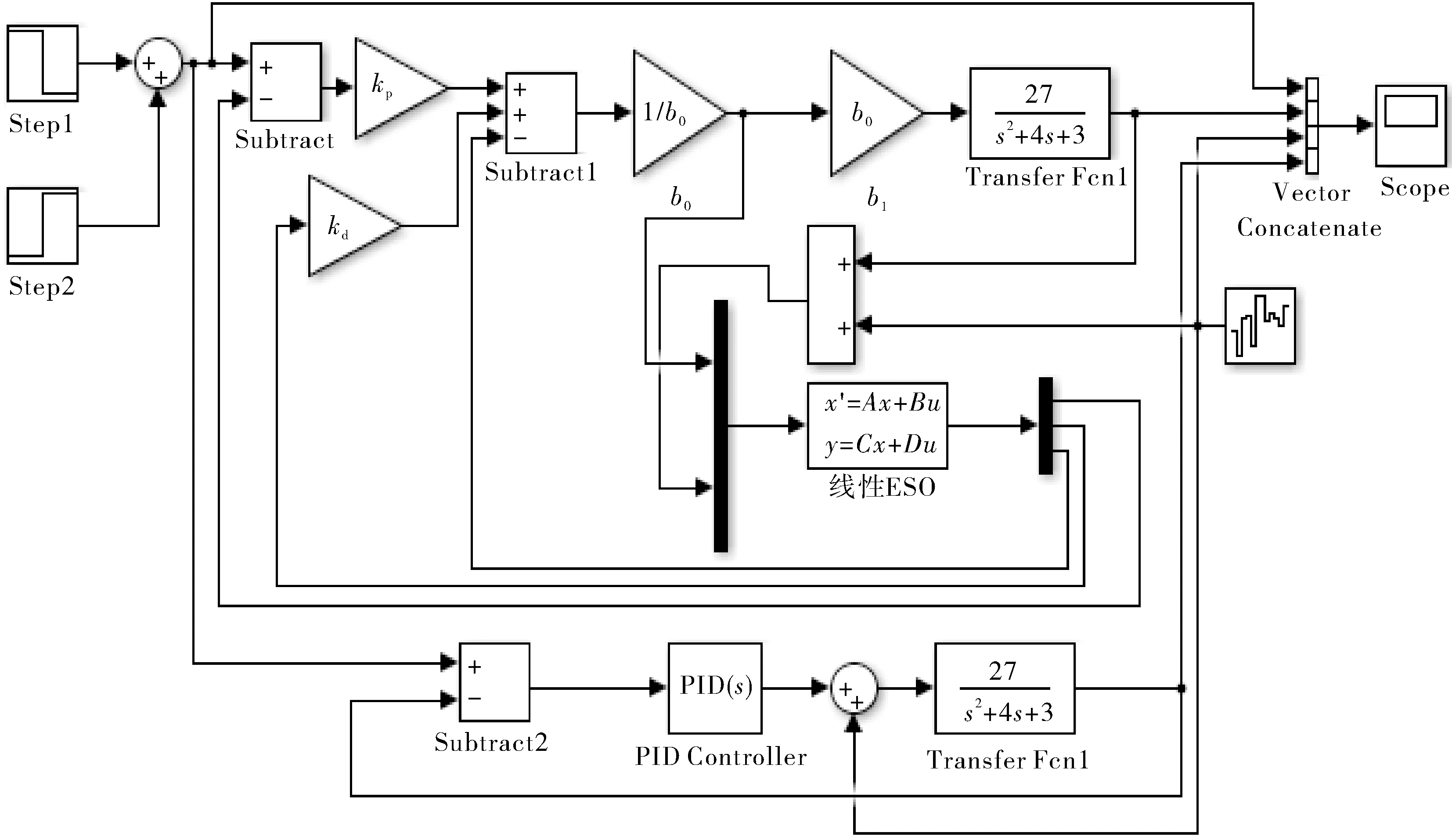
图3 Simulink仿真模型
本设计采用3个跳变的阶跃信号来模拟PCR反应曲线(图4),LADRC控制和PID控制方法对模型进行控制,在同一阶跃信号下的控制输出信号,如图4所示。
设计两种大小不同的不确定干扰,分别如图5、6所示。第1种干扰扰信号主要加在变性阶段给出1~2℃的干扰信号,用来模拟PCR仪实际试验中加热装置和加热负载的影响。第2种抗扰是在每个阶段加上时间随机,大小在±3℃内的干扰信号,主要模拟PCR仪在进行温度试验中遇到的不确定不可估量的干扰源和外界温度变化的影响。

图4 两种控制下的温度输出曲线

图5 第1种小振荡扰动

图6 第2种较大振荡扰动
在这两种扰动下两种控制器的输出信号如图7、8所示。

图7 第1种扰动下的控制输出
分析图7可知,当试验在变性阶段出现干扰信号时,PID控制器的信号输出有±5℃的波动,可能在实际试验中达不到变性所需温度导致PCR失败,同时也有可能超调使得Taq DNA聚合酶失活。而LADRC控制下的输出信号并未受到干扰影响。分析图8同样可以看出,每个阶段的干扰信号都会影响PID控制的系统输出,在退火和延伸阶段,干扰信号使输出信号出现大范围波动,波动导致温度不在反应的变化范围内,不利于引物和模板的结合。而LADRC对各阶段的干扰信号都能做出及时的补偿措施,变动范围在规定之内,满足试验进行的条件与检测标准。
可见,LADRC控制器的抗扰能力比PID控制强,对于试验过程出现不确定时间大小的干扰信号都能保证系统输出稳定,使得各阶段的温度变换都在规定范围内进行,保证试验结果检测的可靠准确性。而且,LADRC控制器比PID控制器可以更快地达到所需温度而没有超调。
综合以上仿真试验可知,LADRC控制器不仅可以解决超调性与快速性的矛盾,更重要的是可以增强对内外扰动的控制,提高了系统的自抗扰性能。
4 结束语
针对PCR仪设计的线性自抗扰控制器,解决了PCR试验中遇到的各种内外扰动问题。由仿真试验结果可知,LADRC控制器较PID控制器能更好地采取应对内外扰动的措施,并且可以缩短响应时间、超调减小且性能良好。因此,将该算法应用于PCR温度控制中,可以保证试验结果的准确性,提高试验质量,具有一定的工程实用价值。
[1] 陈居得,杨明.PCR扩增基因检测中的温度控制[J].仪器仪表用户,2004,11(1):59~61.
[2] 陈实,张卫平,陈文元,等.PCR温度控制技术的研究进展[J].测控技术,2007,26(11):20~22.
[3] 韩京清.线性系统的结构与反馈系统计算[C].全国控制理论及其应用学术交流会论文集.北京:中国自动化学会自动控制理论委员会,1981:43~55.
[4] 韩京清.控制理论——模型论还是控制论[J].系统科学与数学,1989,(4):328~335.
[5] Zheng Q,Gao L Q,Gao Z Q.On Stability Analysis of Active Disturbance Rejection Control for Nonlinear Time-varying Plants with Unknown Dynamics[C].Proceedings of the IEEE Conference on Decision and Control.Piscataway,NJ:IEEE,2007:12~14.
[6] Tian G,Gao Z Q.Benchmark Tests of Active Disturbance Rejection Control on an Industrial Motion Control Platform[C].American Control Conference,ACC’09.Piscataway,NJ:IEEE,2009:5552~5557.
[7] Gao Z Q.Scaling and Bandwidth-parameterization Based Controller Tuning[C]. Proceedings of the IEEE American Control Conference.Piscataway,NJ:IEEE,2003:4989~4996.
[8] 许秀锋,陆敏恂,周爱国,等.基于Smith预估器的PCR仪时滞温控系统[J].同济大学学报(自然科学版),2015,43(2):293~298.
[9] 谭小元,杨琴琴,王培成,等.基于Atmega128微控制器的芯片级PCR仪温度控制系统[J].湖北民族学院学报(自然科学版),2011,29(4):406~409.
[10] 韩京清.自抗扰控制技术——估计补偿不确定因素的控制技术[M].北京:国防工业出版社,2009.
[11] 吴超,王浩文,张玉文,等.基于LADRC的无人直升机轨迹跟踪[J].航空学报,2015,36(2):473~483.
[12] 彭少康,王怀杰,刘玉县.基于模糊PID控制算法的PCR仪温度控制研究[J].仪表技术,2016,(3):34~37.
ApplicationofLinearAuto-disturbanceRejectionControllerinTemperatureControlSystemofPCRInstrument
SHAO Lei, HE Tao,LI Ji, LIU Hong-li, HAN Xue
(TianjinKeyLaboratoryforControlTheoryandApplicationsofComplicatedSystemsinSchoolofElectricalEngineering,TianjinUniversityofTechnology)
Considering the fact that when having PCR (polymerase chain reaction) applied to gene amplification detection, the external disturbance to the reaction temperature affects the test results, a linear auto-disturbance rejection controller was designed; through estimating various internal and external disturbances in the temperature transformation, the special linear feedback compensation was adopted to reduce disturbance in process.
auto-disturbance rejection controller, PCR instrument, disturbance, compensation
TH862+.6
A
1000-3932(2017)04-0357-05
2016-08-25,
2017-03-15)
天津市科委科技重大专项与工程(15ZXZNGX00140);天津市应用基础与前沿技术研究计划项目(16JCTPJC49400)。
邵磊(1973-),副教授,研究方向为物联网监控系统、机器人视觉识别系统和激光多普勒动态测量系统。
联系人:何涛(1991-),硕士研究生,研究方向为物联网和自主机器人,624494473@qq.com。
