基于生物特征纹理信息的西瓜追溯标识算法设计与实现
2017-11-01邢向阳高俊祥
邢向阳,刘 峰,高俊祥
基于生物特征纹理信息的西瓜追溯标识算法设计与实现
邢向阳,刘 峰,高俊祥※
(华中农业大学信息学院,武汉 430070)
为了将生物特征识别技术应用于追溯系统中的果品标识,该文提出了一种采用西瓜蒂外围纹理信息标识果品个体的方法。该方法首先采集西瓜图像并在瓜蒂外围构造一个环形区域;将环形区域归一化后利用Gabor滤波器对图像纹理进行特征提取及编码;然后通过计算码间的Hamming距进行纹理编码的匹配。在试验中,为100个西瓜在采后贮藏初始、第7 天和第14 天各采集一幅图像并计算出3组每组100个纹理编码,将第7 天、第14 天的每一个编码与初始阶段的每一个编码两两比对,累计完成20 000次比对证实西瓜纹理具有唯一性,不同个体的纹理特征各不相同。使用成对数据的假设检验证实在采收后14 d内纹理特征不随时间的推移产生显著变化(>0.05)。通过理论和试验证实算法对平移、尺度和旋转具有适应性,即西瓜在图像中的平移、尺度和旋转对Hamming距的计算不会产生显著影响(>0.05)。使用最大类间方差法在50个西瓜的纹理编码内训练出判别阈值,并用该阈值判别另外50个西瓜3个时间点间相互比对生成的100个来自同一个西瓜的Hamming距和4 900个来自不同西瓜的Hamming距,结果表明上述Hamming距均能正确判别,准确率与召回率为100%。该研究为农产品追溯系统的标识技术提供新的思路。
生物特征;纹理;算法;追溯系统;食品安全;特征提取
0 引 言
近年来,质量安全追溯系统作为控制农产品品质的有效方法日益受到重视,多数发达国家先后制定了食品安全追溯规则[1]。随着农业技术的发展,中国城乡居民对农产品质量安全的要求越来越高;不断曝光的“香瓜中毒”、“染色脐橙”、“爆炸西瓜”等问题[2-3]使得人们对生鲜果蔬产品的质量安全尤为关注。构建农产品质量安全追溯系统,实现对售出产品的信息查询、对问题产品的追溯是解决上述问题的重要技术手段[4-5]。中国农业科研机构进行了农产品质量追溯体系的研究[6],但是仍有很多问题没有完善的解决方案,产品的标识技术则是其中一例。产品的标识包括标识码与标识介质两个要素,当前标识技术中标识码多采用生产过程中的批次流水号等唯一的编码;而标识介质包括纸质条形码、二维码和射频识别卡RFID(radio frequency identification)3种[7]。条形码基于可见光反射技术,二维码采用数字图像技术[8],二者均具有成本低,操作简单的优势,但在果蔬产品中应用既容易受潮污损又容易复制伪造。RFID通过无线电信号识别特定目标并读写相关数据[9],保密性好且不易污损,但由于RFID成本较高而果蔬类农产品附加值一般较低使得其应用大受限制。
当前迅速发展的生物识别技术(biometric identification technology)是指依据生物体固有的生物特征或行为特征,使用计算机或嵌入式系统进行自动识别[10]。目前的研究大多以人体的生物特征为对象,包括人脸识别[11]、虹膜识别[12]、指纹识别[13]、掌纹识别[14]、声音识别[15-16]、视网膜识别等[17]。近年也有科研人员以大型家畜为对象进行生物特征标识的研究,如鼻纹[18]、虹膜[19]、面部识别等[20]。如何利用果品自身的生物特征标识果品个体是追溯系统的基础性工作,此类研究尚未见报道。
本文利用纹理信息将生物特征识别技术应用到果品标识中,以纹理特征明显的西瓜为例探讨基于生物特征的果品标识技术,借鉴虹膜识别[21-22]提出基于西瓜纹理信息的标识算法并进行试验验证,以期为研究西瓜纹理用于标识的可行性及其实现方法提供参考。
1 材料与方法
1.1 试验材料与图像采集
试验材料采用8424西瓜100个,西瓜采收后常温下一般14 d内可以保持品质,因而试验在采后贮藏初始、第7天、第14天为每个西瓜采集一幅图像。利用三脚架固定Canon EOS7D数码相机,设置分辨率1 920×1 280像素、自动白平衡、无曝光模式采集西瓜蒂及其周围区域图像,所有照片均在试验室条件下拍摄。图1展示了拍摄照片使用的三脚架、相机、以及它们与西瓜的相对位置,瓜蒂朝向相机,西瓜与相机的距离约为0.3 m。获得的数字图像以JPEG格式存储并导入计算机,在Matlab R2015a平台上编制程序进行图像处理和标识算法的实现;试验结果的统计分析和图片展示使用Excel和R语言完成。
试验图像和相关数据公布在服务器ftp://218.199.68.162/watermelon,包括下述内容:3组原始图像共3×100幅,分别存储于目录ImagesA、ImagesB和ImagesC下;每幅图像的纹理编码,分别存储于目录TexturesA、TexturesB和TexturesC下;Hamming距的原始数据存储于目录HammingDist_AB_AC下的文件HD_AB.xls和文件HD_AC.xls中;在目录TransRotatScale下存储了2.4节试验中发生了平移、尺度、旋转变换的5×16幅图像(5次重复验证每次16幅图像),与之对应的未发生平移尺度旋转的5×16幅图像,每幅图像的纹理编码,变换和无变换图像的Hamming距。上述数据读者可自行下载,内有readme.txt文件,其中包含目录结构和文件内容的详细说明。
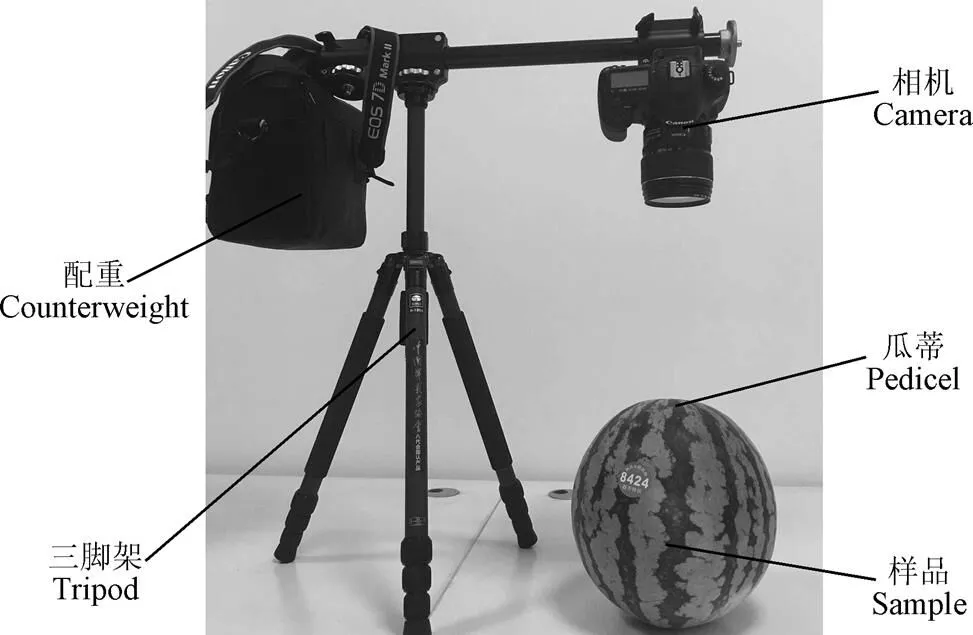
图1 图像采集装置
1.2 算法总体描述
为了使同一个西瓜不同时间的图像能够采用相同的参考点计算纹理,本文以西瓜蒂外围环形区域的纹理作为生物特征进行标识,方法总体流程如图2所示。主要包括3个关键环节:1)获取图像并灰度化后,以瓜蒂中心为圆心做大小2个同心圆,2个同心圆之间形成一个圆环;对圆环图像进行预处理;2)使用Gabor滤波器计算出该圆环的纹理编码作为西瓜的标识存储于数据库中备查,该标识码在数据库中是唯一的;3)查询时按照上述2个步骤计算出被查询西瓜瓜蒂圆环的纹理,之后与数据库中各条记录进行比对,比对过程为计算二者的Hamming距离。当Hamming距离小于某阈值时表明比对命中,否则未命中。
1.3 图像纹理特征的计算
1.3.1 瓜蒂外围圆环的构造
瓜蒂处呈明显的圆形轮廓,设其圆心为(1,1),半径为1,以该轮廓为内圆做半径大于内圆的同心圆,同心圆半径为1,从而得到一个以(1,1)为中心的同心圆环,该圆环用于提取西瓜纹理特征。经试验取=1.5可以获得较好结果,其示意图如图3。
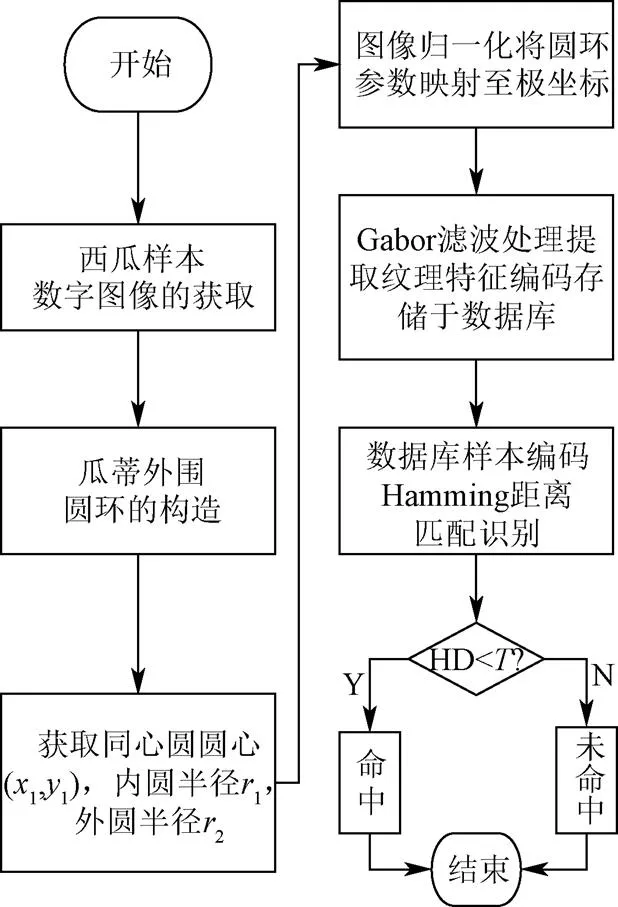
注:(x1, y1)为同心圆圆心;r1和r2同心圆内圆和外圆半径,单位为像素;HD为两个编码的Hamming距;T为Hamming距判别阈值,下同。
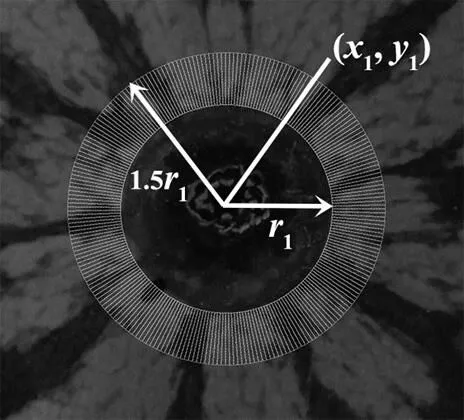
图3 环形区域图像
1.3.2 环形图像归一化
不同瓜蒂的圆环图像大小不同,即使同一个瓜2次拍摄的图像大小和位置也不会完全一致。为了将每幅图像调整到相同的尺寸和对应位置需要将圆环图像归一化[23],从而消除平移和尺度变换对纹理计算的影响。
如1.3.1节所述圆环内圆圆心为(1,1),半径为1,外圆圆心为(2,2),半径为2,现采用极坐标变换进行归一化,以圆心为极点,以轴正方向为极轴建立极坐标系。因环形区域为同心圆,故2=1,2=1,2=1.51。设点(,)为环形区域中任意一点,该点的极径为,极角为,则其坐标值可以表示为




无变换Without transformation尺度变换Scale transformation平移变换Translation transformation
a. 原始图像
a. Original images


无变换Without transformation尺度变换Scale transformation平移变换Translation transformation
b. 归一化图像(横坐标代表极角,纵坐标代表比值)
b. Normalized images (Horizontal ordinate represents polar angle; vertical ordinate represents ratio)


无变换Without transformation尺度变换Scale transformation平移变换Translation transformation
c. Gabor纹理图像
c. Images of Gabor texture
图4 无变换、有尺度和平移变换图像的归一化和Gabor纹理
Fig.4 Normalized images and Gabor texture images of without-transformation, scale transformation and translation transformation
1.3.3 纹理特征提取及编码
本文采用一维Gabor滤波器[25]来对归一化后的矩形图像纹理信息进行特征提取及编码。Gabor 滤波器能较好的提取图像不同频率,方向及尺度等信息,具有良好的方向选择性和频率选择性,适合图像细节纹理信息的提取[26]。设归一化后的矩形图像行数和列数分别为和。之后将各列按式(3)进行平均化处理,得到一维图像信号()。
式中=0,1,2,…,(-1),()为归一化图像中对应的像素灰度值。将得到的所有一维纹理特征信号通过一维Gabor滤波器进行滤波处理,滤波后的值按照式(4)进行量化编码。
式中()表示一维图像信号()的纹理特征编码,sgn()为符号函数;为中间变量,在式(4)的求和过程中该变量会被消除。()为一维Gabor滤波器,其数学表达式
式中表示滤波器的中心频率,代表滤波器的带宽,二者单位均为Hz。使用Gabor滤波器对图4b所示的归一化图像进行纹理分析后得到的图像如图4c所示。
图像进行Gabor滤波后,得到局部相位信息的值为复数。用一个阈值来量化相位信息的实部与虚部,用下述方法[27]将滤波后的数据二值化:如果实部大于0,则相应的特征编码为1,否则置0;如果虚部大于0,则相应的特征码编为1,否则置0。每个像素对应实部虚部两个值,本文归一化图像是100×240像素,由此可获得圆环的纹理编码100×480个值,每个值均为0或1。
1.4 纹理特征标识码的匹配
基于上述步骤取得的西瓜纹理特征标识码进行识别,是一个典型的模式匹配问题。本文通过特征标识码间的Hamming距离来判断所标识个体的异同。Hamming距离计算式为
式中为特征编码位数,XOR表示异或运算,P、Q分别表示纹理编码、的第位。由式(6)可以看出,Hamming距离HD在[0, 1]区间变化,2个纹理编码、越相似HD越接近0,差别越大HD越接近1。
值得注意的是,为了消除样本图像旋转对编码匹配结果的影响,这里把图像的旋转转化成为编码的偏移[28]。相匹配的2个编码相对移动一定的位数就相当于原图像对应点旋转一定的角度,因此可在纹理编码中,通过编码的左右移动循环匹配来克服图像旋转带来的问题。在移位匹配中,依次对纹理编码向左或向右循环移动1~480列,筛选出最小Hamming 距,以此消除样本图像旋转造成的匹配误差,实现算法对图像旋转的适应性。
1.5 数据处理方法
1)纹理编码和Hamming 距的计算方法:根据1.3节的方法,计算初始、第7天、第14天每幅西瓜图像的纹理编码,3组编码依次命名为1,2…100;1,2…100;1,2…100。根据1.4节的方法,将组纹理编码与组进行比对时,把组中每一个纹理编码B与组中每一个纹理编码A比对计算出Hamming距HD,比对次数共有10 000次。当时代表2个编码来自于同一个西瓜不同时间的照片,共有100个这样的元素,分别记为HD_AB_SAM,=1, 2, 3, …, 100,由这些元素构成的集合记为HD_AB_SAM;另外9 900个元素是不同西瓜纹理比对的Hamming距,分别记为HD_AB_DIF,其中=1, 2, 3, …, 100,=1, 2, 3, …, 100,且≠。由这些元素构成的集合记为HD_AB_DIF。按照上述步骤将组纹理编码与组进行比对,同理可定义集合HD_AC_SAM和HD_AC_DIF。
2)阈值的确定方法:在追溯系统中每个产品对应一条记录,查询时以产品的标识码为唯一性索引(unique index)。在对某个西瓜进行查询时,需要计算它的纹理编码与数据库中各记录纹理编码的Hamming距,当Hamming距小于某阈值时表明比对命中;否则未命中[29]。为了设定阈值,本文将100只西瓜分成2组,第1号至50号用于计算阈值,得到阈值后对第51至100号西瓜进行判别。阈值的计算采用最大类间方差(otsu)算法[30],过程如下:首先取2组数据HD_AB_SAM和HD_AC_SAM,=1, 2, 3…50;取另外2组数据HD_AB_ DIF和HD_AC_DIF,=1, 2, 3…50,=1, 2, 3…50且≠。然后在这些元素的取值范围内从小到大取阈值,计算小于的元素均值0及其元素个数占元素总数的比例0,大于的元素均值1及其元素个数占元素总数的比例1,则2部分的总均值为=00+11。建立目标函数式(7)

式中()就是当分割阈值为时的类间方差表达式,otsu算法扫描的值域,将()取得全局最大值时所对应的作为最终的分割阈值。当被分割的2类有重合时为一个确定的值;当2类之间没有重合时在某一区间之内取任意值都能实现类间方差最大,此时取该区间的平均值。
3)纹理编码的稳定性分析方法:能够用于个体识别的生物特征必须是稳定的,不随时间的推移而产生显著变化,本文使用集合HD_AB_SAM和HD_AC_SAM中的数据分析纹理的时间稳定性。为这2个集合中的元素进行成对数据的检验:以元素对间的差值构造检验统计量,以差值的均值为0作为原假设,将问题转化为原假设能否被接受;之后用检验方法检验差值,如果接受原假设,则纹理信息在上述时间范围内是稳定的。
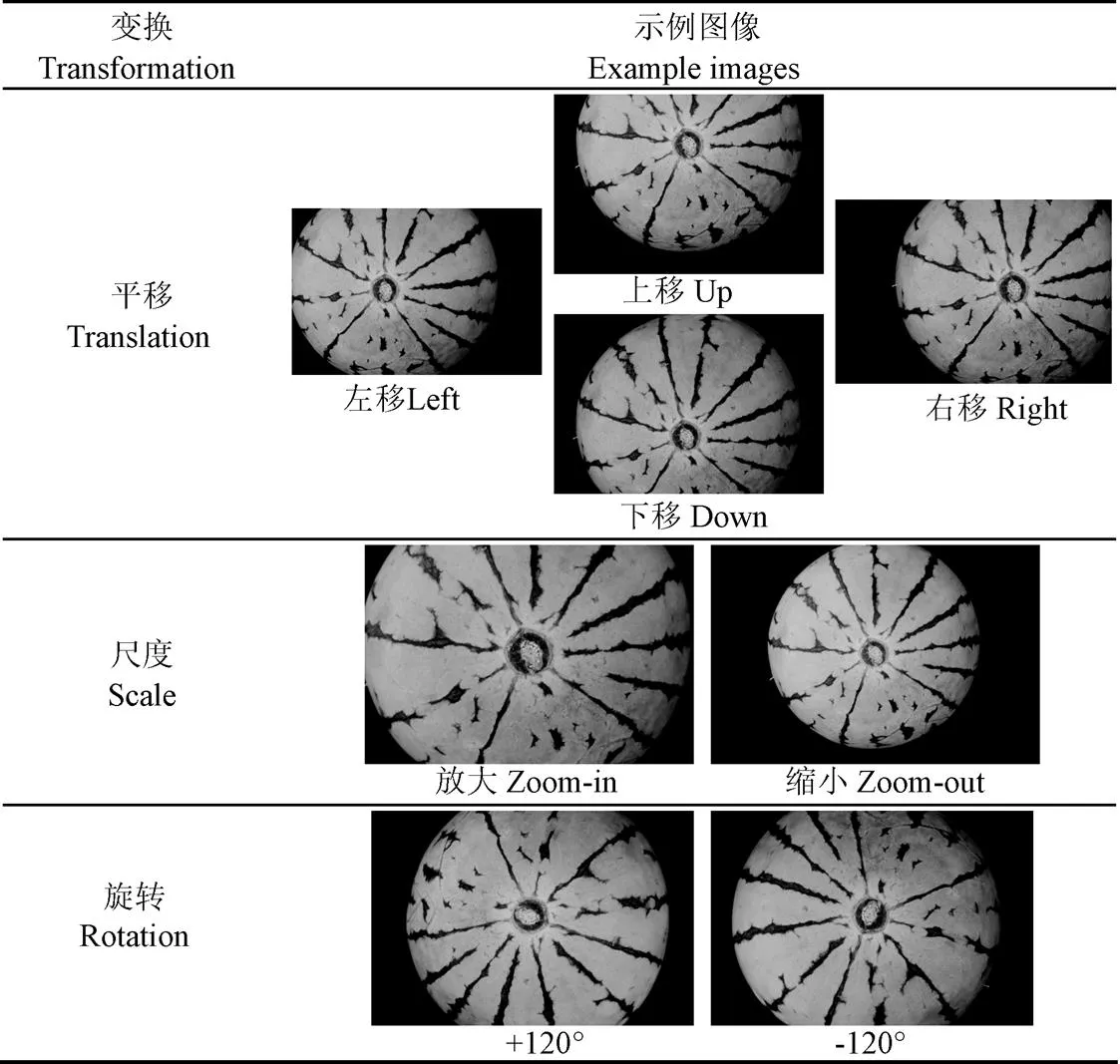
4)算法对平移、尺度、旋转适应性的试验:图像采集装置在不同时间、不同条件下获取的图像难以保持完全相同,在图像变换上一般表现为拍摄对象的平移、尺度和旋转。本文算法在1.3.2节用圆环图像归一化处理平移和尺度问题,在1.4节用纹理特征标识码的循环匹配处理旋转问题。为了说明上述处理的效果,进行如下试验:向上、下、左、右平移西瓜改变其在图像中的位置,共4种平移方式;缩小和扩大西瓜与镜头的距离实现图像的缩放,共2种尺度变换方式;旋转西瓜+120°、−120°以实现图像的旋转,共2种旋转方式。试验中平移、尺度、旋转的组合变化共有4×2×2=16种,示例图像如表1所示。为了采用假设检验判定上述变化是否引起了Hamming距的显著变化,试验同时采集了无平移、尺度和旋转的图像16幅作为对照,采用检验分析上述Hamming距并记录结果。随机选择5个不同的西瓜重复上述试验以增强结果的可靠性,每个西瓜都采集了16幅平移、尺度、旋转的图像和16幅无平移、尺度和旋转的对照图像。
表1 平移尺度旋转示例图像
Table 1 Example images of translation, scale and rotation
2 结果与分析
2.1 Hamming距的统计信息
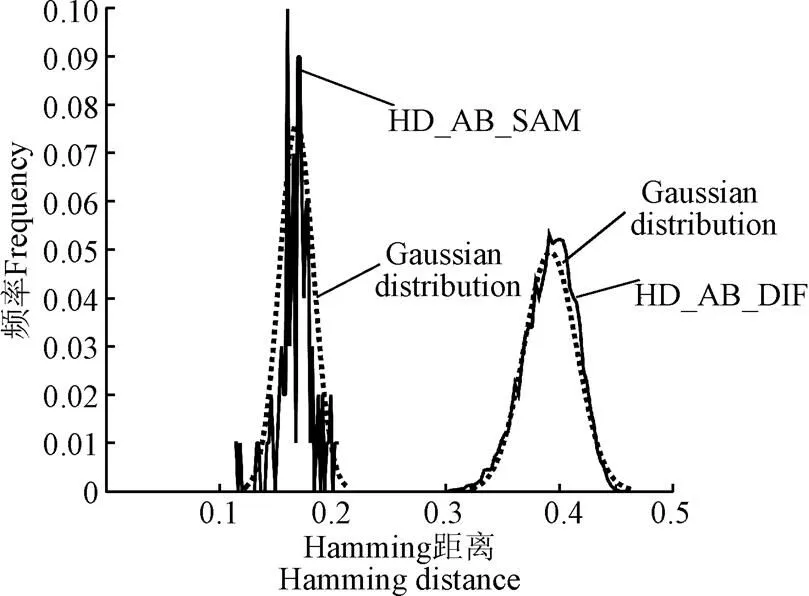
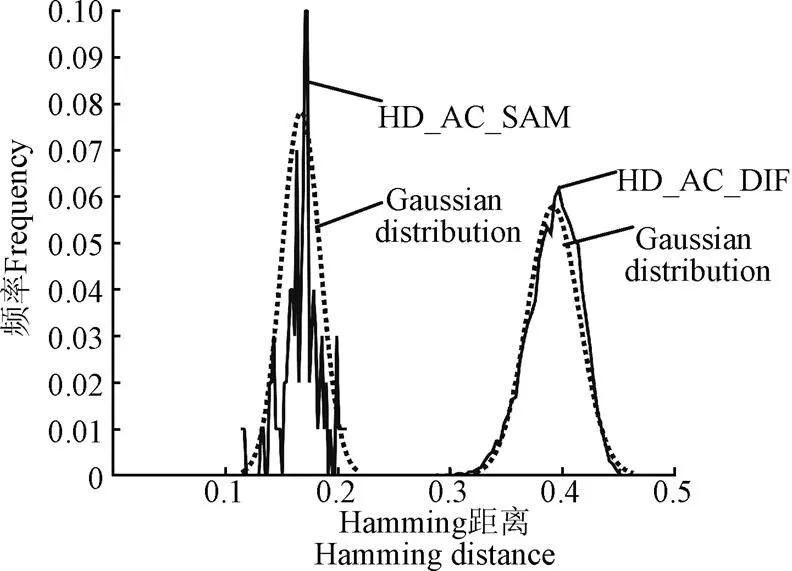
计算HD_AB_SAM中各元素的平均值为0.168,标准差为0.015;HD_AB_DIF中各元素的平均值为0.392,标准差为0.023。HD_AC_SAM中各元素的平均值为0.167,标准差为0.017;HD_AC_DIF中各元素的平均值为0.391,标准差为0.023。这表明当Hamming距达到0.168左右时,2幅图像的纹理已非常接近;而Hamming距达到0.391左右时,2幅图像的纹理基本没有关系。
图5a展示了HD_AB_SAM和HD_AB_DIF的Hamming距概率分布,图中横坐标代表Hamming距的值,纵坐标代表Hamming距的归一化频率。HD_AB_SAM的归一化频率是指:该集合中元素的最大值减去最小值,并将差值50等分作为一个组距(bin),统计每个组距的元素数并分别除以集合中元素总数即得到归一化频率;其他集合的归一化频率与此类似。为便于比较,图中也以HD_AB_SAM和HD_AB_DIF中各元素的均值和标准差为对应参数画出了Gaussian分布曲线。图5b展示了HD_AC_SAM和HD_AC_DIF中各元素的概率分布。从图5中可以看出:不同西瓜的Hamming距HD_AB_DIF和HD_AC_DIF大体符合正态分布,而相同西瓜的Hamming距HD_AB_SAM和HD_AC_SAM由于样本较少因而波动较大,但也基本接近Gaussian分布。
a.组与组纹理编码的Hamming距分布
a. Hamming distance distribution of group&texture codes
b.组与组纹理编码的Hamming距分布
b. Hamming distance distribution of group&texture codes
注:HD_AB_SAM为、两组编码中相同西瓜纹理编码的Hamming距;HD_AB_DIF为、两组编码中不同西瓜纹理编码的Hamming距。 HD_AC_SAM为、两组编码中相同西瓜纹理编码的Hamming距;HD_AC_DIF为、两组编码中不同西瓜纹理编码的Hamming距。
Note: HD_AB_SAM is the set of Hamming distances from the texture codes of same watermelon between groupand; HD_AB_DIF is the set of Hamming distances from the texture codes of different watermelon between groupand. HD_AC_SAM is the set of Hamming distances from the texture codes of same watermelon between groupand; HD_AC_DIF is the set of Hamming distances from the texture codes of different watermelon between groupand.
图5 纹理编码的Hamming距分布
Fig.5 Hamming distance distribution of texture codes
2.2 纹理信息的唯一性
如1.5节所述,组与组比对完成需要进行10 000次匹配并产生相同数量的Hamming距,图6用热图展示了这10 000个数据,此外在网络服务器提供了原始数据。如图6a所示,横纵坐标分别代表组、组纹理编码对应的西瓜编号1, 2, 3, …, 100,图中每一个方块代表相应的Hamming距,该Hamming距的值用颜色深浅表示。图中处于对角线位置的方块代表同一西瓜比对的Hamming距,其他位置代表不同西瓜比对的Hamming距。从图6a中可以看出对角线上的数据远小于非对角线的数据,任意一个西瓜除了与自身纹理编码相近外,与其他所有编码均有明显区别,这说明最相近的编码在数据集内是唯一的。从而用纹理进行西瓜的标识是可行的。图6b展示的是组与组的比对结果,可以得到相似结论。
2.3 纹理信息的稳定性
对HD_AB_SAM和HD_AC_SAM这2个集合中的元素进行成对数据的检验,值为0.826 4>0.05,即在置信水平=0.05下,100个西瓜纹理编码第7天与初始、第14 天与初始的Hamming距无显著变化,从而说明在该时间段内纹理是稳定的。
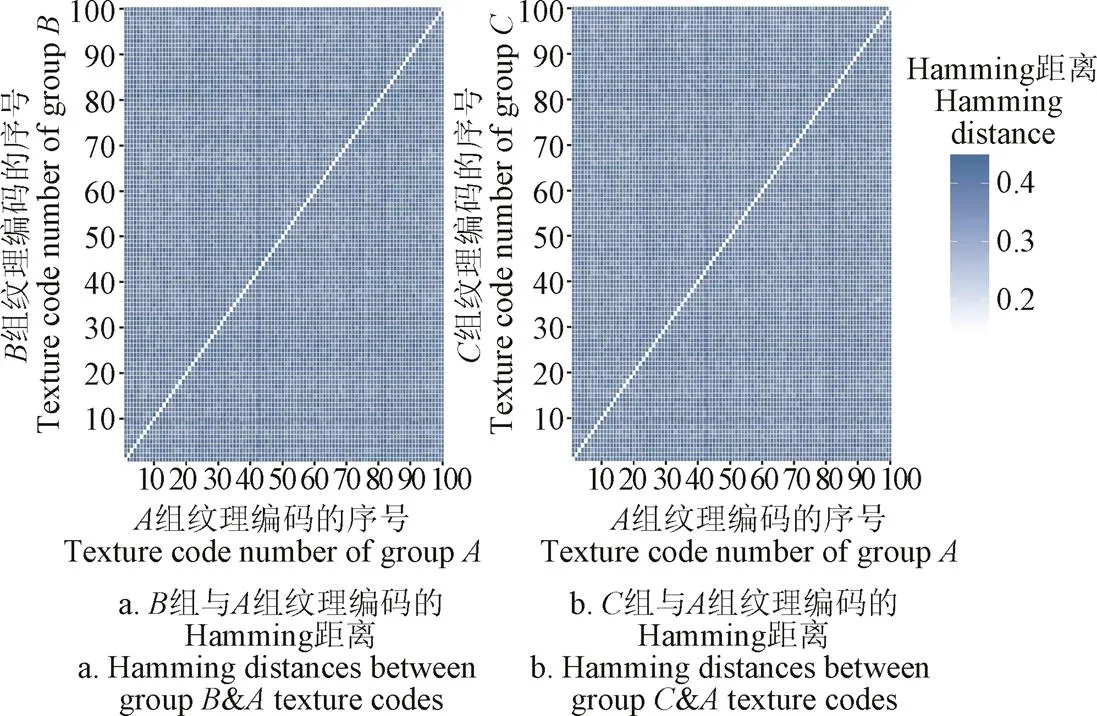
图6 纹理编码的Hamming距离
2.4 算法对西瓜平移、尺度和旋转的适应性
表2展示了图像变换前后Hamming距变化显著性的检验分析结果,从表中可以看出:在5次重复试验中>0.05,因此西瓜平移、尺度和旋转对Hamming距不会产生显著影响。
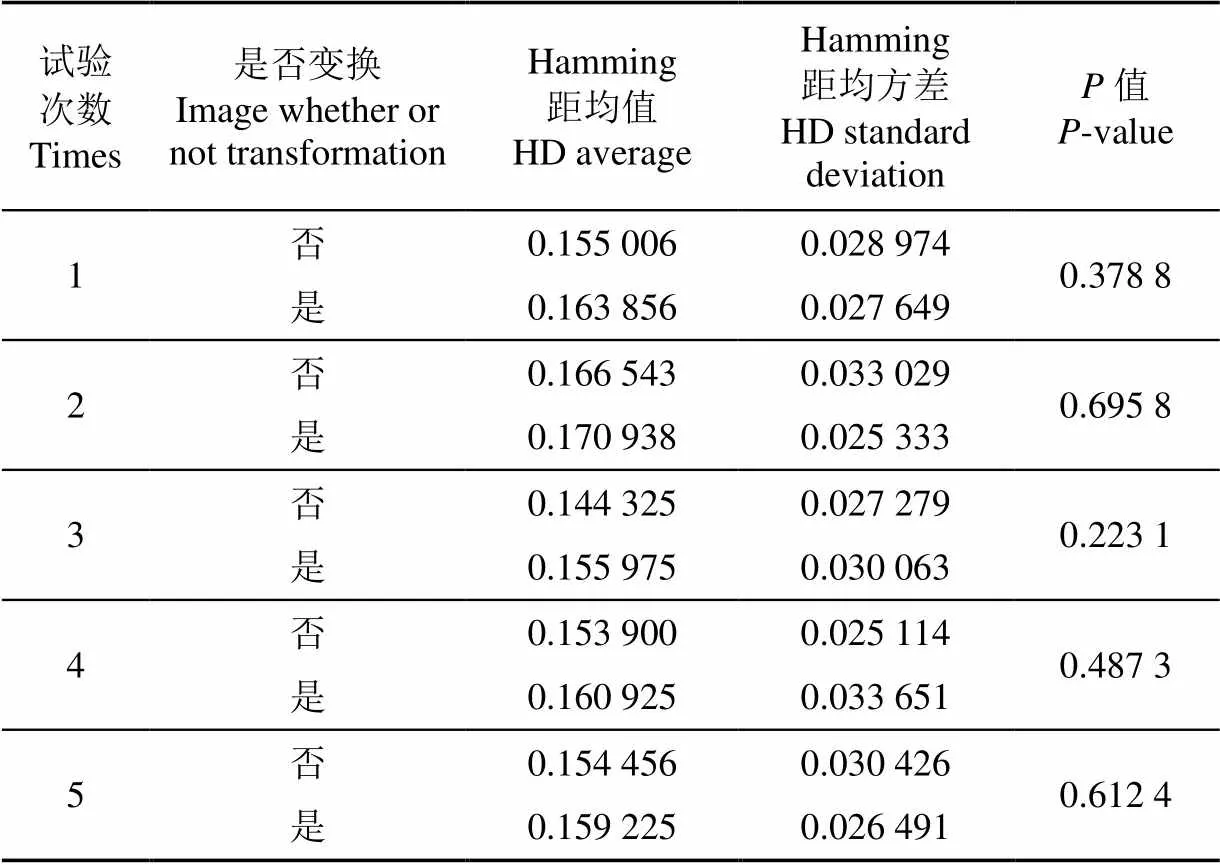
表2 平移、尺度、旋转对Hamming距影响的显著性检验
2.5 阈值判别结果与比对速率
按照1.5节otsu方法计算出Hamming距判别阈值=0.259,小于该阈值的2个纹理编码来判断为来自于同一个西瓜,大于该阈值的编码来自于不同西瓜。使用该阈值对第51至100号西瓜纹理进行判别,即集合HD_AB和HD_AC中的元素,其中=51, 52, 53…100,=51, 52, 53, …, 100,因而包括100个来自同一个西瓜的Hamming距和4 900个来自不同西瓜的Hamming距,网络服务器提供了Hamming距的原始数据。试验结果表明,使用该阈值能够正确判别上述全部Hamming距,准确率与召回率均为100%,二者计算公式为:


式中是来自同一西瓜的编码正确判断为来自同一西瓜的个数;是来自不同西瓜的编码错误判断为来自同一西瓜的个数;是来自同一西瓜的编码错误判断为来自不同西瓜的个数。
西瓜的比对速率与很多因素有关,包括软硬件平台、已存储编码的数量、编码提取顺序、程序设计的策略等。本文用下述试验估算纹理的比对速率,通过设定循环次数并记录完成时间进行模拟测试。试验条件如下:普通台式计算机DELL 9020MT,处理器为Intel Core I7-4790,主频3.60 GHz;用C++编制程序进行匹配,共存储了1030个纹理编码。如果需要比对至最后一个编码,完成一个西瓜的匹配需要1.00 s。
3 结 论
1)设计了西瓜纹理提取方法,并根据该方法计算100个西瓜在采后贮藏初始、第7天、第14天的纹理编码,将第7天、第14天的每一个编码与初始的每一个编码两两比对,证实西瓜的纹理是唯一的,不同西瓜的纹理各不相同。
2)使用成对数据的假设检验证实在采收后14 d内纹理是稳定的,纹理特征不随时间的推移产生显著变化(>0.05)。
3)设计了采用纹理信息标识西瓜个体的方法并进行试验,对50个西瓜3个时间点间相互比对生成的5 000个Hamming距进行了判别,准确率与召回率均为100%,证实了算法的有效性。
4)随机抽取5个西瓜为每个西瓜采集平移、尺度、旋转图像16幅,以及无平移、尺度和旋转的图像16幅作为对照。采用假设检验证明上述变换未引起Hamming距的显著变化(>0.05),即算法对图像的平移、尺度和旋转有适应性。
本文方法直接对西瓜自身的纹理特征进行编码作为标识码;无需条形码、二维码、RFID等标识介质,从而可以克服条形码、二维码在生鲜产品中使用易污损的缺点以及RFID成本高的不足;另一方面,纹理特征难以仿造显然具有良好的防伪性能。纹理编码具有唯一性、稳定性、抗污损、低成本、防伪性的特点,这些特点符合农产品追溯系统对产品编码技术的需求。本文是纹理信息应用于果品标识的探索性研究,试验中使用普通可见光相机获取图像,而虹膜识别一般使用近红外成像技术,以克服可见光影响获取更高质量的纹理图像,在后续工作中将尝试采用近红外技术以提高成像质量。
[1] 孙娟娟,陈松. 欧盟农产品质量安全立法的实践和启示[J]. 中国食物与营养,2016,22(2):9-13.
Sun Juanjuan, Chen Song. Practice and enlightenment of European Legislations on quality and safety of agricultural products[J]. Food & Nutrition in China, 2016, 22(2): 9-13. (in Chinese with English abstract)
[2] 孙兴权,姚佳,韩慧,等. 中国食品安全问题现状、成因及对策研究[J]. 食品安全质量检测学报,2015,6(1):10-16.
Sun Xingquan, Yao Jia, Han Hui, et al. Present situation, causes and countermeasures for food security in China[J]. Journal of Food Safety & Quality, 2015, 6(1): 10-16. (in Chinese with English abstract)
[3] 熊培芳. 中国食品安全问题现状成因及对策研究[J]. 农业与技术,2016,36(7):175-176.
[4] Verdouw C N, Wolfert J, Beulens A J M, et al. Virtualization of food supply chains with the internet of things[J]. Journal of Food Engineering, 2016, 176(1): 128-136.
[5] 钱建平,张保岩,邢斌,等. 集成实时快速检测信息的蔬菜追溯系统改进与应用[J]. 农业工程学报,2015,31(4):306-311.
Qian Jianping, Zhang Baoyan, Xing Bin, et al. Improvement and application of vegetable traceability system with integrated real-time rapid detection of information[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(4): 306-311. (in Chinese with English abstract)
[6] 董玉德,丁保勇,张国伟,等. 基于农产品供应链的质量安全可追溯系统[J]. 农业工程学报,2016,32(1):280-285.
Dong Yude, Ding Baoyong, Zhang Guowei, et al. Quality and safety traceability system based on agricultural product supply chain[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(1): 280-285. (in Chinese with English abstract)
[7] 钱建平,杜晓伟,李文勇. 农产品追溯标识双向转换设备研究[J]. 农业机械学报,2016,47(11):239-244.
Qian Jianping, Du Xiaowei, Li Wenyong. Bidirectional transformation equipment for Agro-food traceable identification labels[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(11): 239-244. (in Chinese with English abstract)
[8] Kim Y G, Woo E. Consumer acceptance of a quick response (QR) code for the food traceability system: Application of an extended technology acceptance model[J]. Food Research International, 2016, 85(7): 266-272.
[9] 苏健,文光俊,韩佳利. 一种基于ISO18000-6B标准的RFID防碰撞算法[J]. 电子学报,2014,42(12):2515-2519.
Su Jian, Wen Guangjun, Han Jiali. An efficient RFID anti-collision algorithm for ISO 18000-6B protocol[J]. Acta Electronica Sinica, 2014, 42(12): 2515-2519. (in Chinese with English abstract)
[10] 孙冬梅,裘正定. 生物特征识别技术综述[J]. 电子学报,2001,29(12A):1744-1748. Sun Dongmei, Qiu Zhengding. A survey of the emerging biometric technology[J]. Acta Electronica Sinica, 2001, 29(12A): 1744-1748. (in Chinese with English abstract)
[11] Feng Jufu, Ma Xiao, Zhuang Wenjing. Collaborative representation Bayesian face recognition[J]. Science China Information Sciences, 2016, 60(4): 1-3.
[12] Mira J, Neto H V, Neves E B. Biometric-oriented iris identification based on mathematical morphology[J]. Journal of Signal Processing Systems, 2015, 80(2): 181-195.
[13] Liu F, Zhang D, Shen L. Study on novel curvature features for 3D fingerprint recognition[J]. Neurocomputing, 2015, 168(22): 599-608.
[14] Raghavendra R, Busch C. Novel image fusion scheme based on dependency measure for robust multispectral palmprint recognition[J]. Pattern Recognition, 2014, 47(6): 2205-2221.
[15] 宣传忠,马彦华,武佩,等. 基于声信号特征加权的设施养殖羊行为分类识别[J]. 农业工程学报,2016,32(19):195-202.
Xuan Chuanzhong, Ma Yanhua, Wu Pei, et al. Behavior classification and recognition for facility breeding sheep based on acoustic signal weighted feature[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(19): 195-202. (in Chinese with English abstract)
[16] Roswandowitz C, Mathias S R, Hintz F, et al. Two cases of selective developmental voice-recognition impairments[J]. Current Biology, 2014, 24(19): 2348-2353.
[17] Sadikoglu F, Uzelaltinbulat S. Biometric retina identification based on neural network[C].// Procedia Computer Science, Proceedings of the 12th International Conference on Application of Fuzzy Systems and Soft Computing, Elsevier, 2016, 102: 26-33.
[18] Tharwat A, Gaber T, Hassanien A E, et al. Cattle identification using muzzle print images based on texture features approach[C]// Advances in Intelligent Systems and Computing, Proceedings of the International Conference on Innovations in Bio-Inspired Computing and Applications, Springer, 2014, 1970: 217-227.
[19] Lu Y, He X, Wen Y, et al. A new cow identification system based on iris analysis and recognition[J]. International Journal of Biometrics, 2014, 6(1): 18-32.
[20] Corkery G P, Gonzalesbarron U A, Butler F, et al. Preliminary investigation on face recognition as a biometric identifier of sheep[J]. Transactions of American Society of Agricultural and Biological Engineers, 2007, 50(1): 313-320.
[21] 黄惠芳,胡广书. 虹膜识别算法的研究及实现[J]. 红外与激光工程,2002,31(5):404-409. Huang Huifang, Hu Guangshu. Study and implementation of iris recognition algorithms[J]. Infrared & Laser Engineering, 2002, 31(5): 404-409. (in Chinese with English abstract)
[22] Lumini A, Nanni L. Overview of the combination of biometric matchers[J]. Information Fusion, 2017, 33(1): 71-85.
[23] Wildes R P. Iris recognition: An emerging biometrie technology[J]. Proceedings of the IEEE, 1997, 85(9): 1348-1363.
[24] 姚立健,周高峰,倪忠进,等. 基于尺度不变特征转换算子的水果表面图像拼接方法[J]. 农业工程学报,2015,31(9):161-166.
Yao Lijian, Zhou Gaofeng, Ni Zhongjin, et al. Matching method for fruit surface image based on scale invariant feature transform algorithm[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(9): 161-166. (in Chinese with English abstract)
[25] Mei Y, Zhao B, Zhou Y, et al. Orthogonal curved-line Gabor filter for fast fingerprint enhancement[J]. Electronics Letters, 2014, 50(3): 175-177.
[26] 张建华,祁力钧,冀荣华,等. 基于Gabor小波和颜色矩的棉花盲椿象分类方法[J]. 农业工程学报,2012,28(1):133-138.
Zhang Jianhua, Qi Lijun, Ji Ronghua, et al. Classification of cotton blind stinkbug based on Gabor wavelet and color moments[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(1): 133-138. (in Chinese with English abstract)
[27] 李欢利,郭立红,王心醉,等. 基于加权Gabor滤波器的虹膜识别[J]. 吉林大学学报,2014,44(1):196-202. Li Huanli, Guo Lihong, Wang Xinzui, et al. Iris recognition based on weighted Gabor filter[J]. Journal of Jilin University, 2014, 44(1): 196-202. (in Chinese with English abstract)
[28] Jin Z, Lim M H, Teoh A B J, et al. A non-invertible randomized graph-based hamming embedding for generating cancelable fingerprint template[J]. Pattern Recognition Letters, 2014, 42(6): 137-147.
[29] Rai H, Yadav A. Iris recognition using combined support vector machine and Hamming distance approach[J]. Expert Systems with Applications, 2014, 41(2): 588-593.
[30] 赵德安,沈甜,陈玉,等. 苹果采摘机器人快速跟踪识别重叠果实[J]. 农业工程学报,2015,31(2):22-28.
Zhao Dean, Shen Tian, Chen Yu, et al. Fast tracking and recognition of overlapping fruit for apple harvesting robot[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(2): 22-28. (in Chinese with English abstract)
Design and implementation of watermelon traceable identification algorithm based on biometric texture information
Xing Xiangyang, Liu Feng, Gao Junxiang※
(430070)
A traceability system is able to provide an opportunity of obtaining quality and safety information of agricultural products from farm to table. Over the past years, many researchers have engaged in it and continuously made significant progresses, however, the identification of fruit has not been resolved perfectly. Traditional identification technologies include barcode, QR (quick response) code and RFID (radio frequency identification) card. Unfortunately, the barcode and QR code paper tags are easily stained in fruit storage and transportation with high humidity, while RFID is rather expensive for low value products like fruits. Biometric identification is distinctive, and measurable characteristics are used to label and describe individuals. The physical characteristics and traits used in biometric identification include but are not limited to fingerprint, iris, voice and face. Since biometric identifiers are unique to individuals, they are more reliable in identification than traditional methods. As a newer and safer technology, biometrics is being extensively studied and widely used in human identification currently. In recent years, it is also used on livestock such as cattle and sheep, yet it has not been reported so far on biometric identification of fresh fruit. This study tried to introduce biometric technology into fruit identification of traceability system to fill in this gap. Based on the algorithm of iris recognition, a watermelon identification method was proposed to exploit texture information of the area around the fruit pedicel. The method could be briefed as the following procedures. The color image of watermelon was firstly transformed into gray image to reduce computational complexity and improve calculation efficiency. Then 2 concentriccircles were constructed to center the watermelon pedicel, which would be the annulus area for extracting texture information. To ensure the invariance of translation and scaling, every original annulus area image was normalized to the same size using polar coordinates transformation. The texture information of normalized rectangle image was filtered using one-dimensional Gabor filters to extract the orientation and phase information due to its excellent direction selectivity and frequency selectivity. The identification of watermelon texture code based on the above steps is a typical pattern matching problem. This study identifies watermelon using the Hamming distance between texture codes. When the Hamming distance is less than the preset threshold, it would be judged to be from the same individual, vice versa. To eliminate the effect of image rotation, this study converts the rotation of the texture image into code offset, and moves forward or backward the code to overcome the problem of image rotation. The experiments were carried out to verify the feasibility and effectiveness of identification method using the texture of annulus area around the watermelon pedicel. As a watermelon can usually be stored for 2 weeks without spoiling at room temperature, we acquired an image for each of 100 watermelons on the harvest day, the 7thday and the 14thday after harvest and figured out 3 groups of texture codes for subsequent phases. The Hamming distances were computed between each texture on the 7thday and on the harvest day, as well as the 14thday and the harvest day. We can get the following results from the experiments. Firstly, every watermelon has its unique texture code. In other words, the texture code of any watermelon is similar with the one from the same individual, while significantly different from the one from any other watermelon. Secondly, we compared 2 groups of Hamming distances from different time using paired-samples T-test and figured out-value that was 0.826 4. It showed that there was no significant difference between the 2 groups of Hamming distances above, which implied the texture feature of watermelon was relatively stable within 2 weeks after harvest. Thirdly, we divided the 100 watermelon into 2 equal groups and calculated the threshold using one group, and then discriminated the other group with the threshold. All the Hamming distances were classified with 100% accuracy rate and 100% recall rate. Finally, the pictures of watermelon would not be exactly identical if they were acquired at different time or on different conditions. These variations likely cause translation, scaling and rotation of watermelon in an image, and the experiment shows that the method is adaptive to these inevitable variations. Although some problems need to be studied further, this research provides a new idea of biometric identification for fruit quality and safety traceability system.
biometrics; texture; algorithms; traceability system; food safety; feature extraction
10.11975/j.issn.1002-6819.2017.18.039
TP391.41
A
1002-6819(2017)-18-0298-08
2017-05-02
2017-07-24
国家自然科学基金项目(31571351),农业部农业技术试验示范项目(2015-2130106)
邢向阳,男,湖北武汉人,研究方向为农产品质量安全追溯技术。武汉 华中农业大学信息学院,430070。Email:845527667@qq.com
高俊祥,男,河北滦南人,副教授,博士,研究方向为农业信息工程。武汉 华中农业大学信息学院,430070。Email:gao200@mail.hzau.edu.cn