耙齿式残膜回收机自动脱膜机构设计
2017-11-01施丽莉胡志超顾峰玮陈有庆
施丽莉,胡志超,顾峰玮,吴 峰,陈有庆
耙齿式残膜回收机自动脱膜机构设计
施丽莉,胡志超※,顾峰玮,吴 峰,陈有庆
(农业部南京农业机械化研究所,南京 210014)
针对耙齿式残膜回收机回收残膜后缺乏自动脱膜机构的现状,设计了耙齿式残膜回收机自动脱膜机构。分析平行四连杆脱膜机构的运动稳定性可靠性及脱膜顺畅性,设计液压装置进行脱膜,并在试验的基础上优化机构,对不同形式刮板进行试验及分析并最终设计适合耙齿式残膜回收机的“倒八字”型刮板。针对影响自动脱膜机构工作效率的关键部件和影响因素分析其运动及受力情况,对“倒八字”型刮板进行影响因素的响应面分析。可得齿板距、刮板角度、脱膜夹角为显著影响的因素,且影响强弱关系为齿板距>刮板角度>脱膜夹角。综合考虑后得到的最佳参数组合为齿板距2 mm、刮板角度70°、脱膜夹角60°。该研究可为相关设备的设计提供参考。
机械化;设计;优化;残膜回收机;响应面分析;脱膜率
0 引 言
地膜覆盖栽培技术因具有增温、保墒、保肥、抑制杂草、减轻作物病害等作用而广泛运用于多种作物的种植过程中。随着地膜覆盖面积的不断增大,造成了越来越严重的“白色污染”,对作物产量及农田机械化均产生不利影响[1-2]。
花生是中国重要的油料作物和经济作物,多年来中国花生种植面积和产量均稳居世界前2位,其残膜污染问题亟待解决[3-4]。现有的滚筒式、铲链式、铲筛式、耙齿式等回收机中,尤以耙齿式残膜回收机回收残膜效果较好,结构简单且工作效率高,能基本满足垄作花生残膜的回收要求,但目前制约耙齿式残膜回收机大面积推广使用的是缺少自动脱膜装置。现有残膜回收机采用的脱膜方法主要有人工脱膜、伸缩杆齿脱膜和脱膜叶片脱膜等,人工脱膜劳动强度大、效率低;伸缩杆齿脱膜机构制造成本高、故障率高;整体或独立叶片脱膜大部分采用逆向脱膜,效果差,不能达到脱膜装置作业要求[5-8]。
针对耙齿式残膜回收机,其自动脱膜机构的研发已成为关键环节。因此,研究残膜回收机脱膜机构、分析探讨脱膜机理,对于研发残膜回收机、提升设备技术水平、满足农业生产要求具有重要现实意义[9-12]。
1 结构及原理
如图1为耙齿式残膜回收机的整机结构示意图。耙齿式自脱膜残膜回收机的主要部件为机架、耙齿、液压装置及脱膜装置组成。其中,液压装置分别装于机架两侧,脱膜工作时,脱膜方管及刮板一起沿着转轴旋转,如图1所示的双点划线即为极限位置,脱膜装置沿着双点划线的轨迹运动,并在液压装置的驱动下实现上下往复运动实现脱膜,图1中为液压固定端点的位置,所示位置为任意一刮板端点的位置。如图2所示为整机结构的三维模型图。

1.机架 2.液压转轴固定 3.液压固定支架 4.耙齿5.脱膜方管 6.液压装置 7.脱膜刮板

图2 耙齿式残膜回收机结构三维图
2 关键部件设计
由于残膜的物料特性对机具脱膜性能及结构参数等均有重要影响,所以在进行关键部件设计之前必须进行田间残膜的物料特性研究。
本次试验地为青岛胶州,通过实地调研可知,残膜大多呈条状和块状分布,膜土草混杂且相互缠绕。地表残留较多,地下也有残留,形状不规则大小不一,在阳光和高温下容易出现脆化等现象。通过对残膜进行的力学性能试验可得结论:厚度相同残膜的拉伸负荷中,纵向和横向拉伸负荷相差不大;残膜与新地膜对比,纵向、横向拉伸负荷等力学特性均发生明显变化,说明铺设时间对地膜的力学性能影响显著。
残膜的物理特性决定了其回收以及收后脱膜的困难程度,因为变形大和膜土草缠绕,所以必须强制脱膜,且脱膜彻底可以实现反复作业。根据分析,可得耙齿式残膜回收机自动脱膜机构的关键部件为脱膜装置及液压装置设计。
2.1 脱膜装置设计
在过程中,耙齿会产生变形,变形后的耙齿会使脱膜更加困难且脱膜机构到达极限位置后难以顺畅归位(即回归水平位置),分析可知脱膜顺畅归位机构装置设计最主要就是脱膜刮板形状和位置的设计。脱膜刮板均匀的分布在转轴上,刮板与耙齿之间相互交错配合,残膜在耙齿与刮板之间的相对运动之中从耙齿上脱下,实现脱膜。脱膜刮板的设计应满足结构合理,回位精准,脱膜顺畅,工作性能可靠,使用寿命长,脱膜效率高等[13-16]。
图3为设计的3种类型的刮板示意图。图3a、图3b为“一”字型刮板和“U”字型刮板示意图,由分析及试验结果可知,其脱膜时主要问题为部分耙齿变形较大,刮板到达极限位置后无法顺畅归位,即耙齿无法保证顺利进入刮板之间的间隙;无法进入刮板间隙的耙齿阻碍了脱膜装置的顺畅归位,必须依靠人力将其扳回原位,影响了作业的顺畅性及工作效率。图3c的“倒八字”型刮板具有顺畅归位机构设置,则很好的解决了脱膜装置的回位问题。
具体分析及对比如图4所示,由于耙齿在前进过程中不仅前后方向,左右方向也会产生变形,所以当左右变形较大时,在反复脱膜的过程中耙齿无法一直保持在刮板间隙之中,会跟刮板卡住,阻碍了机具的顺畅性,“倒八字”型刮板因有脱膜夹角,可在脱膜过程中将耙齿顺畅引回原轨道,回位精准实现位置矫正,确保机具连续作业及耙齿的使用性能。

图3 三种类型刮板示意图
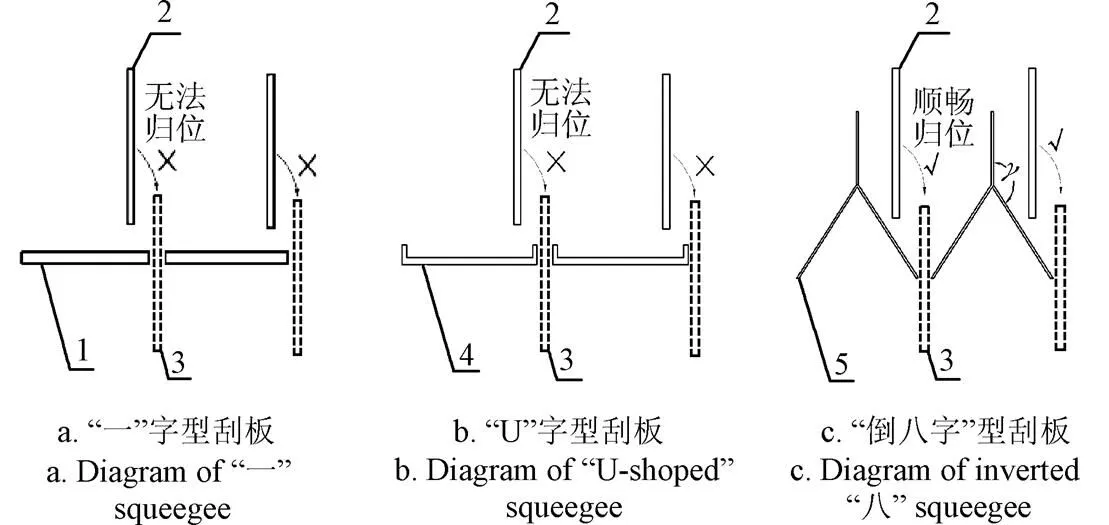
1.“一”字型刮板 2.耙齿变形后 3.耙齿变形前 4.“U”字型刮板 5.“倒八字”型刮板
如图5所示为残膜受力简图,且其中虚线所示的“倒八字”弧形轨道可保证回位精准,刮板角度为,刮板向下运动时与耙齿之间的夹角为,刮板耙齿之间的距离为且非常小,刮板紧贴耙齿向下运动进行脱膜可保证脱膜效果。在残膜回收机的脱膜过程中,残膜要收到重力、耙齿的摩擦力、刮板的摩擦力、残膜自身对耙齿的压力、耙齿的支持力外,还要受到由残膜自身特性产生的吸附力和静电作用力。其中,吸附力及静电作用力亦十分微小,故忽略不计[2]。

注:Ff为摩擦力,N;θ为刮板角度,(°);F1为耙齿对残膜的拉力,N;FN为耙齿对残膜的支持力,N;F2为刮板向下的作用力,N;G为耙齿上残膜的重力,N;μ为动摩擦系数;F′为刮板对残膜的压力,N;Fy为残膜在竖直方向收到的合力,N;β为刮板向下运动时与耙齿之间的夹角,(°);S为刮板耙齿之间的距离。
如图5所示为任意点处残膜的受力简图,可得残膜满足以下方程:



根据分析可知,实现顺畅脱膜需满足式(6)、式(7)2个条件,即残膜在竖直方向的受力合力方向是竖直向下的,且刮板向下运动时与耙齿之间的夹角应为钝角。


2.2 液压脱膜装置设计
2.2.1 平面连杆机构设计
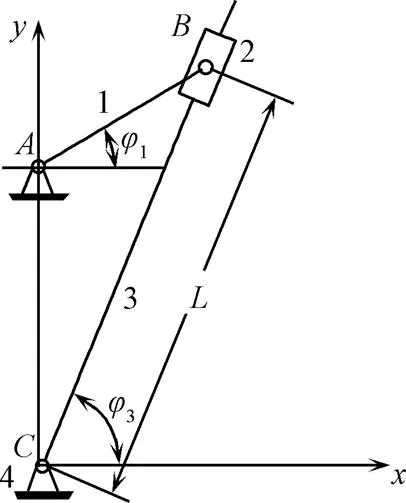
脱膜装置应在满足脱膜要求的前提下,结构简单运行平稳,故采用平面连杆机构进行设计[17-20]。如图6a所示为平面连杆机构的一种,为含一个移动副的四杆机构,运动时,滑块2既可沿点旋转也可沿着方向进行往复运动。
a. 平面连杆机构示意图
a. Diagram of planar linkage

b. 运动轨迹示意图
b. Diagram of movement track
注:、为固定端,为可运动部件,1、2分别为可运动部件在运动过程中的2个位置,为的距离,、1、3、1为运动过程中各部件的夹角,(°)。
Note:,are fixed end;is moving parts;1,2are two places of;is the space betweenand;,1,3and1are angles of parts during moving, (°).
图6 平面连杆机构示意图
Fig.6 Schematic diagram of planar linkage
如图6b所示为平面连杆机构的运动轨迹示意图,可以看出极位夹角及运动路径。1为极位夹角,其取值范围为(0°,180°),并有=1。在耙齿式残膜回收机设计中,点位置即为图1中2液压转轴固定的位置,的位置即为图1中液压装置的固定点的位置,而的运动方式即为液压驱动下脱膜方管与液压连接点的运动方式,点可实现沿液压驱动方向的直线往复运动以及围绕固定点的旋转运动,从理论上验证了液压驱动连杆机构进行卸膜的合理性。
如上述分析及图1中所示点的运动轨迹满足如下方程:
(8)
式中X、Y分别为点在方向、方向的位移;刮为刮板的长度;为运动过程中刮板与水平面的夹角角度。
2.2.2 液压装置设计
耙齿式自动脱膜残膜回收机的液压装置是关键部件,其设计要求涉及整机的安全性能和工作性能,因此需总体上对所设计的液压系统做出设计和计算,结合实际工作条件,确定合理参数。在进行脱膜作业时,液压主要提供推力和拉力,位置和距离要求精确稳定,因此选择单活塞双作用液压缸。
1)负载分析
设液压油缸的工作负载为F

根据分析及推算,现暂定F=2 000 N,根据标准,可得工作压力1=6 MPa;液压缸的机械效率=0.95。
2)油缸内径
液压缸缸体的材料选为45#钢,调制处理,活塞杆的材料选为45#钢,调制处理。由式(10)计算可得后对数据进行圆整,并根据实际工作情况,先设计液压缸内径=40 mm。

3)活塞杆直径


式中为活塞杆直径,m;为油缸内径,m;为速度比;1为活塞杆的回缩速度,m/min;2为活塞杆的伸出速度,m/min。
当压力1≤10 MPa时,速度比为1.33;当压力1在>10~20 MPa时,速度比的范围为1.46~2;当压力1>20 MPa时,速度比为2。本文速度比取值为1.33。根据式(12)计算,对数据进行圆整以及分析实际情况,确保运行平稳及性能可靠,现取活塞杆直径=25 mm。
4)活塞杆强度校核
在液压脱膜的过程中,活塞杆是液压缸向外传递推力的重要零件,它承受着对刮板向下的作用力,必须有足够强度,故按强度进行校核。

式中为材料的屈服强度;为安全系数(一般取≥1.4)。
又根据公式材料的许用应力[]=σ/,已知45号钢的许用应力为72 MPa,最大推力2 000 N,可求得活塞杆直径的取值范围≥5.9 mm,而=25 mm,故活塞杆强度符合要求。
3 田间试验及参数优化
如图7a所示为刮板几何形状示意图。分析可知刮板的几何形状对脱膜率有很大影响。从避免干涉和结构合理的角度分析,刮板的整体长度3应保持在合理范围之内,即100~120 mm之间。刮板角度以及刮板与耙齿之间的距离等都是影响其工作效率的重要因素[21-26]。
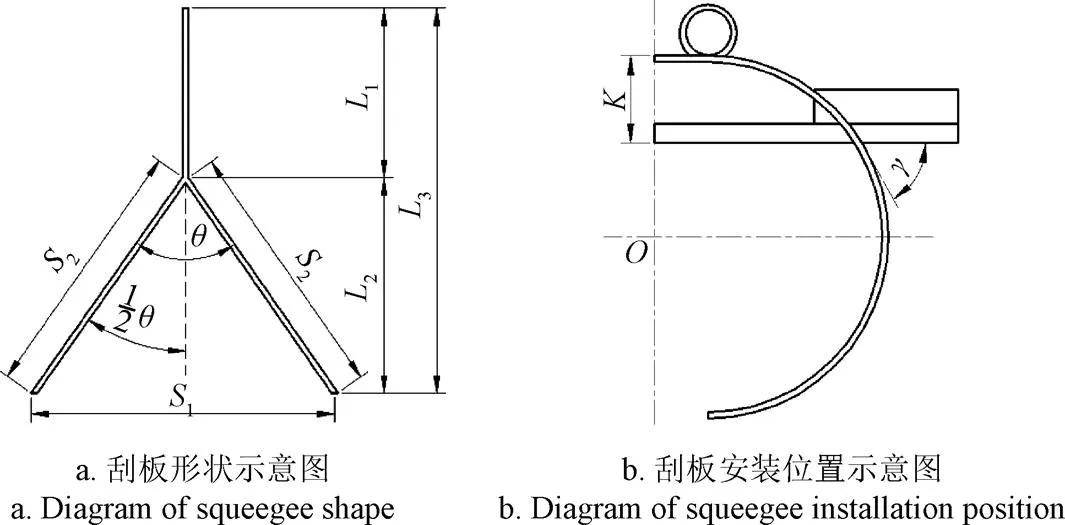
注:L1、L2、L3、S1、S2、K分别表示刮板的长度尺寸;γ为脱膜夹角, (°)。
各因素之间的关系如式(14)-(17)所示。




式中为刮板与耙齿间距离,mm;为相邻两耙齿间距离,mm。
如图8b刮板安装位置示意图,点为耙齿圆心的位置,刮板的安装位置与耙齿上端的距离为,不同的安装位置导致刮板向下运动时与耙齿的夹角也会不同,分析可知,脱膜夹角的大小也是影响脱膜效率的重要因素之一,即为锐角时等有利于脱膜过程的进行。由前期试验可得,相邻两耙齿之间的最佳距离为120 mm,此时的残膜回收率较高且不会壅土,即=120 mm。上述公式经化简后可得式(18)-(20)。



通过上述分析,刮板与耙齿间距、脱膜夹角、刮板角度为影响脱膜率的重要因素。应通过试验的方式进行分析优化,并进行验证试验以确定最优的结构和参数组合,使耙齿式残膜回收机自动脱膜机构的工作性能达到最佳,以实现自动脱膜,解决耙齿式残膜回收机的缺乏有效自脱膜机构的难题。
3.1 试验设计
3.1.1 试验条件及指标
本试验地点为山东青岛,时间为2016年9月-10月,前茬作物为花生,花生收获后进行收膜试验。花生种植方式为垄作,一垄双行,垄高100 mm;土壤类型为沙壤土且土块较多,表层含水率约为16%(0~50 mm)。地膜宽度1 000 mm,厚度0.008 mm。先进行收膜试验,再进行自动脱膜试验。试验现场如图8所示。

图8 试验现场
脱膜过程运行平稳、一次脱膜率高是衡量机构脱膜效果的指标。耙齿式残膜回收机脱膜装置进行脱膜后,对脱下来的残膜进行洗净、晾晒,并用电子称进行称量和数据记录;未脱下来仍缠绕在耙齿上的残膜由人工卸下,并进行净、晾晒、称量和数据记录。用脱膜装置脱下来的残膜质量与残膜的总质量的比值为机具的一次脱膜率。

式中为一次脱膜率;1为进行一次脱膜试验后脱下的残膜的质量,kg;2为一次脱膜试验后未脱下的残膜的质量,kg。
3.1.2 试验过程与结果
在自动脱膜过程中存在很多影响一次脱膜率的非线性因素,通常需要选用二次或者更高次的模型来逼近响应,模型可采用响应面法来建立[27-30]。根据分析及经验,刮板与耙齿间距(简称齿板距)、刮板角度、脱膜夹角为影响脱膜率的重要因素,为便于统一及对数据进行分析,响应面分析中将这3个因素分别用1、2、3表示,一次脱膜率作为评价指标,用表示[22-26]。
通过分析可知:齿板距1的距离对脱膜效果有影响,刮板和耙齿之间贴合的越近,脱膜的效果也好。但是在耙齿式残膜回收机在收膜的过程中,耙齿会不可避免的产生变形,变形后再进行脱膜时,会产生回位困难的问题,所以齿板距1应在合理范围内,即试验时分别选为1、2、3 mm。刮板角度2的取值若过大则会导致其垂直方向的分力减小,不利于脱膜;且刮板整体高度有限制,2的取值也不能过小,故试验时刮板角度2分别为60°、70°、80°。脱膜夹角3的理论取值范围为(0°,90°),即为锐角;角度过大会导致脱膜效率降低,角度过小又不符合实际情况,所以试验时脱膜夹角3的取值为50°、60°、70°。对各因素进行水平编码如表1所示,试验结果如表2所示。

表1 试验因素水平

表2 试验结果
3.1.3 试验结果分析
应用软件Design expert对表3中数据拟合并进行方差分析,可得回归系数及其显著性检验如表3所示。残膜回收机自脱膜装置脱膜率回归方程如式(22)所示。

式中1、2、3分别为齿板距、刮板角度和脱膜夹角对应的编码值。
如表3所示,模型的显著性检验=363.37,<0.000 1,说明二次回归方程的检验达到高度显著;且失拟性检验=0.047,>0.1为不显著,说明在试验范围内模型的拟合性非常好,可以用此模型进行对齿板距、刮板角度、脱膜夹角这3个因素的影响效果进行分析和预测。

表3 显著性检验
注:<0.01为极显著,<0.05为显著。
Note:<0.01 is highly significant,<0.05 is significant.
3.2 影响因素分析及参数优化
3.2.1 影响因素分析
通过表3显著性检验分析可知,齿板距、刮板角度、脱膜夹角对一次脱膜率均有显著性影响,且影响强弱次序为齿板距>刮板角度>脱膜夹角,其中齿板距的影响为极显著,且13、23、12、22均为显著。
如图9所示为一次脱膜率的响应曲面及3D效果图。从图中可直观看出,1、2、3对目标函数影响显著。图9a、9b、9c分别表示因素12、23、13对一次脱膜率均产生影响,综合考虑3个因素并对其进行优化分析可得出最优参数组合。
3.2.2 参数优化
一次脱膜率是反应耙齿式残膜回收机自动脱膜机构工作效果的重要指标,在试验范围内要求其值越大越好。应用Design expert的寻优功能对其进行优化,优化后的齿板距为1.32 mm、刮板角度71.34°、脱膜夹角59.05°,预测的一次脱膜率为0.966。在实际试验过程中,齿板距大小对一次脱膜率影响较大。齿板距越小,耙齿与脱膜刮板贴合的越近,越有利于脱膜。对优化结果进行圆整,圆整后的齿板距为1.5 mm、刮板角度70°、脱膜夹角60°,仿真试验得到的一次脱膜率为0.959。实际的工作过程中,耙齿会产生变形,即齿板距可能会小于1.5 mm。在试验中,若间距过小导致耙齿与脱膜刮板紧紧贴合使得脱膜困难、回位困难、产生噪音等以及影响脱膜作业的顺畅性,再加上田间收膜受到阻力及本身加工误差等原因,综合考虑软件分析结果及田间试验作业实际情况,现定最优组合为齿板距2 mm、刮板角度70°、脱膜夹角60°。

注:响应面试验因素和水平表见表1,响应值见表2,下同。
4 结 论
1)耙齿式残膜回收机的自动脱膜机构的主要部件之一为脱膜刮板,通过对“一”字型,“U”字型,“倒八字”型结构优缺点进行分析及试验,确定“倒八字”型脱膜刮板回位精准,可保障其脱膜顺畅,为最合理的顺畅脱膜机构。通过分析可得,实施脱膜顺畅性需满足的条件为:残膜在竖直方向所受合力方向为向下,刮板向下运动时与耙齿之间的夹角为钝角。
2)液压装置设计为平面连杆机构形式,具体为摆动导杆机构,通过对其结构和运动轨迹的分析从理论上确定了该结构的可行性。
3)以一次脱膜率为主控目标,以耙齿刮板间距、脱膜夹角、刮板角度为影响脱膜率的重要因素进行试验,并用Design-expert进行响应面分析。并综合考虑软件分析结果及试验实际情况,影响强弱次序为齿板距>刮板角度>脱膜夹角,确定最优组合为齿板距2 mm、刮板角度70°、脱膜夹角60°。相比于人工卸膜,提高了工作效率,可为耙齿式残膜回收机大规模推广使用提供参考。
[1] 严昌荣,梅旭荣,何文清,等. 农用地膜残留污染的现状与防治[J]. 农业工程学报,2006,22(11):269-272.
Yan Changrong, Mei Xurong, He Wenqing, et al. Present situation of residue pollution of mulching plastic film and controlling measures[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2006, 22(11): 269-272. (in Chinese with English abstract)
[2] 杜晓明,徐刚,许端平,等. 中国北方典型地区农用地膜污染现状调查及其防治对策[J]. 农业工程学报,2005,21(增刊1):225-227.
Du Xiaoming, Xu Gang, Xu Duanping, et al. Mulch film residue contamination in typical areas of North China and counter measures[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2005, 21(Supp.1): 225-227. (in Chinese with English abstract)
[3] 马树庆,王琪,郭建平,等. 东北地区玉米地膜覆盖增温增产效应的地域变化规律[J]. 农业工程学报,2007,23(8):66-71.
Ma Shuqing, Wang Qi, Guo Jianping, et al. Geographical change law of effects of corn plastic mulching on increasing temperature and production in Northeast China[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2007, 23(8): 66-71. ( in Chinese with English abstract)
[4] 董合干,刘彤,李勇冠,等. 新疆棉田地膜残留对棉花产量及土壤理化性质的影响[J]. 农业工程学报,2013,29(8):91-99.
Dong Hegan, Liu Tong, Li Yongguan, et al. Effects of plastic film residue on cotton yield and soil physical and chemical properties in Xinjiang[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(8): 91-99. (in Chinese with English abstract)
[5] 侯书林,胡三媛,孔建铭,等. 国内残膜回收机研究的现状[J]. 农业工程学报,2002,18(3):186-190.
Hou Shulin, Hu Sanyuan, Kong Jianming, et al. Present situation of Research on plastic film residue collector in China[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2002,18(3): 186-190. (in Chinese with English abstract)
[6] 吕钊钦,张磊,张广玲,等. 链条导轨式地膜回收机的设计与试验[J]. 农业工程学报,2015,31(18):48-54.
Lü Zhaoqin, Zhang Lei, Zhang Guangling, et al. Design and test of chain guide rail-type plastic film collector[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(18): 48-54. (in Chinese with English abstract)
[7] 谢建华. 垄作残膜捡拾及卸脱装置的研究[D]. 北京:中国农业大学,2014:79-93.
Xie Jianhua. Study on Pick-up and Unloading Device for Residual Plastic Film of Bed Planting[D]. Beijing: China Agricultural University, 2014: 79-93. (in Chinese with English abstract)
[8] 徐弘博,胡志超,吴峰,等. 残膜回收收膜部件研析[J]. 农机化研究,2016,38(8):242-249.
Xu Hongbo, Hu Zhichao, Wu Feng, et al. Study on the collecting component of plastic film residue collector[J]. Journal of Agricultural Mechanization Research, 2016, 38(8): 242-249. (in Chinese with English abstract)
[9] 陈发,史建新,王学农,等. 弧型齿残膜捡拾滚筒捡膜的机理[J]. 农业机械学报,2006,37(6):36-41. Chen Fa, Shi Jianxin, Wang Xuenong, et al. Study on collecting principle of arc-type tooth roller for collecting plastic residue[J]. Transactions of the Chinese Society for Agricultural Machinery, 2006, 37(6): 36-41. (in Chinese with English abstract)
[10] 游兆延,顾峰玮,吴峰,等. 垄作花生残膜回收技术研究[J]. 农机化研究,2016,38(1):207-211.
You Zhaoyan, Gu Fengwei, Wu Feng, et al. Research on ridged peanut residue plastic film recycling technology[J]. Journal of Agricultural Mechanization Research, 2016,38(1): 207-211. (in Chinese with English abstract)
[11] 胡凯,王吉奎,李斌,等. 棉秆粉碎还田与残膜回收联合作业机研制与试验[J]. 农业工程学报,2013,29(19):24-32.
Hu Kai, Wang Jikui, Li Bin, et al. Development and experiment of combined operation machine for cotton straw chopping and plastic film collecting[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(19): 24-32. (in Chinese with English abstract)
[12] 李斌,王吉奎,蒋蓓,等. SMS-1500型残膜回收机的改进与起输膜分析[J]. 农机化研究,2013,35(4):44-47,51.
Li Bin, Wang Jikui, Jiang Bei, et al. The improvement and analysis on the picking and transporting film compoments of SMS-1500 type tlastic film collecting machine[J]. Journal of Agricultural Mechanization Research, 2013,35(4): 44-47,51. (in Chinese with English abstract)
[13] 李从权,王学农,史建新,等. 秸秆粉碎还田及残膜回收联合作业机械的悬挂架的有限元分析[J]. 农机化研究,2007(4):38-40.
Li Congquan, Wang Xuenong, Shi Jianxin, et al. Finite element analysis on suspension frame of field straw chopper work with mulch film collect machine[J]. Journal of Agricultural Mechanization Research, 2007(4): 38-40. (in Chinese with English abstract)
[14] 张佳喜,陈发,王学农,等. 一种新型可自动卸膜滚刀式秸秆粉碎残膜回收联合作业机的研制[J]. 中国农机化,2012(1):122-125.
Zhang Jiaxi, Chen Fa, Wang Xuenong, et al. Study on a new type of hob plastic film residue recovery machine with self-motion unloading plastic film[J]. Chinese Agricultural Mechanization, 2012(1): 122-125. (in Chinese with English abstract)
[15] 聂理君. 残膜回收机弧形挑膜齿的应用研究[D]. 乌鲁木齐:新疆大学,2006:26-27.
Nie Lijun. Researching the Application of the arc Spring-finger in Plastic Film Residue Collector[D]. Urumqi: Xinjiang University, 2006: 26-27. (in Chinese with English abstract)
[16] 卢博友,杨青,薛少平,等. 圆弧形弹齿滚筒式残膜捡拾机构设计及捡膜性能分析[J]. 农业工程学报,2000,16(6):68-71.
Lu Boyou, Yang Qing, Xue Shaoping, et al. Design of arc spring-tooth type collector for collecting mulching plastic film the collecting property analysis[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2000, 16(6): 68-71. (in Chinese with English abstract)
[17] 李明洋. 分区式残膜回收机的设计与试验研究[D]. 阿拉尔:塔里木大学,2015:17-30. Li Mingyang. Design and Experiment Study on Zoning of Residual Film Recycling Machine[D]. Alaer: TARIM University, 2015: 17-30. (in Chinese with English abstract)
[18] 张佳. 驱动耙残膜回收联合作业机的设计及试验研究[D]. 乌鲁木齐:新疆农业大学,2013:11-20.
Zhang Jia. Design and Experiment Study on Driving Target and Plastic Film Collecting Operation Machine[D]. Urumqi: Xinjiang Agricultural University, 2013: 11-20. (in Chinese with English abstract)
[19] 李刚,张林海,付宇,等. 曲柄摇杆式残地膜捡拾机构研究[J]. 农业机械学报,2014,45(增刊1):63-67.
Li Gang, Zhang Linhai, Fu Yu, et al. Crank-rocker mechanism for collecting plastic film[J]. Transactions of the Chinese Society of Agricultural Machinery, 2014, 45(Supp.1): 63-67. (in Chinese with English abstract)
[20] 张惠友,侯书林,那明君,等. 收膜整地多功能作业机的研究[J]. 农业工程学报,2007,23(8):130-134.
Zhang Huiyou, Hou Shulin, Na Mingjun, et a1. Multifunctional machine for retrieving the used plastic film after harvesting and soil preparation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2007, 23(8): 130-134. (in Chinese with English abstract)
[21] 徐爱英. 静电式农田残膜回收理论分析与试验研究[D]. 阿拉尔:塔里木大学,2017.
Xu Aiying. Theoretical Analysis and Experimental Research of Electrostatic Fields Residual Film Recycling[D]. Alaer:Tarim University, 2017. (in Chinese with English abstract)
[22] 谢建华,陈学庚,孙超伟. 杆齿式残膜回收机卸膜过程分析及高速摄像试验[J]. 农业工程学报,2017,33(10):17-24.
Xie Jianhua, Chen Xuegeng, Sun Chaowei. Unloading film process analysis and high-speed photography experiment of pole-tooth residual plastic film collector[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(10): 17-24. (in Chinese with English abstract)
[23] 王科杰,胡斌,罗昕,等. 残膜回收机单组仿形搂膜机构的设计与试验[J]. 农业工程学报,2017,33(8):12-20.
Wang Kejie, Hu Bin, Luo Xin, et al. Design and experiment of monomer profiling raking-film mechanism of residue plastic film collector[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(8): 12-20. (in Chinese with English abstract)
[24] 徐伟. 农用残膜回收机主要结构设计与分析研究[D]. 哈尔滨:哈尔滨工业大学,2006.
Xu Wei. Design and Analysis Study on Main Working Parts of an Agricultural Used Plastic Film Collector[D]. Harbin: Harbin Institute of Technology, 2006. (in Chinese with English abstract)
[25] 明光,毕新胜,王晓东,等. 夹持输送式残膜捡拾机气力脱膜机理研究[J]. 中国农机化学报,2016,37(7):1-5.
Ming Guang, Bi Xinsheng, Wang Xiaodong, et al. Research on mechanism of air force separating residual film for grippinog residu film for gripping and delivering residual plastic film collector[J]. Journal of Chinese Agricultural Mechanization, 2016, 37(7): 1-5. (in Chinese with English abstract)
[26] 王春耀,陈发,郭小军,等. 弧形挑膜齿残膜清理滚筒运动分析[J]. 农业机械学报,2005,36(8):38-44. Wang Chunyao, Chen Fa, Guo Xiaojun, et al. Analysis on the movement of arc spring-finger type plastic film residue pickup cylinder[J]. Transactions of the Chinese Society for Agricultural Machinery, 2005, 36(8): 38-44. (in Chinese with English abstract)
[27] 郑文纬. 机械原理[M]. 北京:高等教育出版社,2008:77-89.
[28] 张泽志,韩春亮,李成未. 响应面法在试验设计与优化中的应用[J]. 河南教育学院学报:自然科学版,2011,20(4):34-37.
Zhang Zezhi, Han Chunliang, Li Chengwei. Application of response surface method in experiment and optimization[J]. Journal of Henan Institute of Education: Natural Science Edition, 2011, 20(4): 34-37. (in Chinese with English abstract)
[29] 任露泉. 试验优化设计与分析[M]. 北京:高等教育出版社,2003:11-16.
[30] 陈魁. 试验设计与分析[M]. 北京:清华大学出版社,1996:22-26.
Design on automatic unloading mechanism for teeth type residue plastic film collector
Shi Lili, Hu Zhichao※, Gu Fengwei, Wu Feng, Chen Youqing
(,,210014,)
With the increasing use of the agricultural plastic film, the pollution it brings is also becoming more and more serious.Therefore, design and experiment on plastic film collector of ridged peanut mean great significance to us, of course, facing huge problems. Mechanical recycling plastic film can overcome shortcomings of the great labor intensity and low efficiency using artificial picking up. However the existing plastic film recycling equipments are generally designed based on experiences and have no precise theoretical researches for components, and there are some issues including unreliable picking up performance and unloading mechanism and serious wear of working parts. This paper focuses on the lack of effective automatic removing mechanism for teeth type residue plastic film collector, and according to this situation, automatic removing and smooth returning mechanism for teeth type residue plastic film collector have been designed. Teeth type residue plastic film collector with self-motion unloading mechanism consists of frame, hydraulic shaft fixture, hydraulic fixing bracket, rake, self-motion unloading square tube, hydraulic device, and self-motion unloading scraper. The stability, reliability, and returning smoothness of the motion of the parallel 4-rod linkage mechanism are analyzed. We design a variety of different forms of squeegees to test, and at last find the best form of inverted “八” squeegee. The key part of the mechanism is focused and the stress analysis is performed. Teeth are persistently distorted when they are working. We design 3 types of squeegees including “一” squeegee, U-shaped squeegee, and inverted “八” squeegee, and at last we find the inverted “八” squeegee can ensure that teeth are put back in origin place, so it can achieve the best results. The design and innovation of the hydraulic system are also important. We choose single-rod hydraulic cyclinder of 45#steel, the size of hydraulic cyclinder diameter is 40 mm, and the size of piston rod diameter is 25 mm. We use the stress analysis on squeegee, and the movement analysis on planar linkage, and find the movement track of the squeegee at last. Based on this, the objective function and constraints are determined, and the major influencing factors of teeth type residue plastic film collector with self-motion unloading mechanism are the space between teeth and squeegee, squeegee angle, and automatic removing mechanism angle. We do experiment in Jiaozhou, Qingdao, China, the previous crop is peanut, and moisture content of soil is 16%. The experiment and response surface analysis are done for the space between teeth and squeegee, squeegee angle, and automatic removing mechanism angle. The data are then processed, and the parameters are optimized by the response surface method with Design Expert. The response surface analysis of the model shows that the effect of the 3 factors on the primary film removal rate is significant. The order of influencing factors is: The space between teeth and squeegee > squeegee angle > automatic removing mechanism angle. The machine is optimized by the function of optimization of Design Expert, the space between teeth and squeegee is 2 mm, the squeegee angle is 70°, and the automatic removing mechanism angle is 60°. Through the field test, which shows the feasibility of the optimization scheme and will provide theoretical basis for the optimization of related machines.The teeth type residue plastic film collector of ridged peanut has a good film removal effect, which meets the design requirements of plastic recyling machine.
mechanization; design; optimization; residue plastic film collector; response surface analysis; rate of automatic unloading
10.11975/j.issn.1002-6819.2017.18.002
S223.5
A
1002-6819(2017)-18-0011-08
2017-01-18
2017-06-20
公益性行业(农业)科研专项“残膜污染农田综合治理技术方案”(201503105_08);中国农业科学院创新工程土下果实收获机械。
施丽莉,女(汉),安徽合肥人,助理研究员,主要从事农机化装备研发。南京 农业部南京农业机械化研究所,210014。Email:1301706961@qq.com
胡志超,男(汉),陕西蓝田人,研究员,博士,博士生导师,主要从事农作物收获及产后加工技术与装备研究。南京 农业部南京农业机械化研究所,210014。Email:nfzhongzi@163.com