缩比模型演示验证飞行试验及关键技术
2017-11-01何开锋毛仲君
何开锋, 毛仲君, 汪 清, 陈 海
(1. 空气动力学国家重点实验室, 四川 绵阳 621000; 2. 中国空气动力研究与发展中心, 四川 绵阳 621000)
缩比模型演示验证飞行试验及关键技术
何开锋1,2, 毛仲君2,*, 汪 清1,2, 陈 海2
(1. 空气动力学国家重点实验室, 四川 绵阳 621000; 2. 中国空气动力研究与发展中心, 四川 绵阳 621000)
首先介绍了国内外缩比模型验证机飞行试验及其应用情况,总结了模型飞行试验的四大研究领域:气动布局演示验证、气动力飞行试验、危险边界飞行试验、新概念新技术演示验证试验;其次,分析了模型飞行试验在带动力自主飞行、模型快速结构设计与制造、模型动力系统设计与测试、飞行控制设计与测试、高精度测量与气动参数辨识等关键技术领域的发展趋势,并给出了中国空气动力研究与发展中心在这些技术方面的部分研究结果;最后,对模型飞行试验的未来发展方向进行了展望。
缩比模型飞行试验;空气动力学研究;气动参数辨识;演示验证
0 引 言
飞行试验是在真实飞行条件下进行科学技术研究和产品测试试验的过程,自人类掌握动力飞行一百多年来,航空科学技术的进步和飞行器的发展离不开大量的飞行试验研究和探索。常规飞行试验通常指有人驾驶试验飞机的飞行试验,一般处于飞机研制的后期,以原型机为试飞平台,通过飞行试验对其气动、结构、动力、控制、航电等特性进行测试、改进和完善,并最终进行定型鉴定[1]。随着航空科学技术进步,新概念、新布局、新技术在新机研制中大量采用,飞行包线不断拓宽,飞行试验成本不断提高,飞行试验的风险越来越大。因此必须发展低成本、低风险和高效率的飞行试验技术。
模型飞行试验是按照动力学相似规律,利用飞行器缩尺模型(或验证机)在真实大气中进行模拟飞行,研究和验证气动/飞行特性、新概念、新技术和新布局的试验手段和方法[2]。相比地面试验,模型飞行试验具有环境条件更加真实,具有气动/结构/飞行/控制/动力等多学科综合的特点;相比全尺寸飞行器的全系统飞行试验,模型飞行试验具有周期短、成本低、风险小等特点。作为空气动力学研究的三种手段之一,模型飞行试验在飞行器研制及空气动力学科发展中有着不可替代的作用[3]。
美国一直非常重视发展验证机飞行试验技术,其X系列技术验证机计划几十年长盛不衰,在推动飞行器新概念、新技术、新布局创新发展中发挥了重要作用,为美国持续保持航空航天技术的领先地位做出了重要贡献[4-5]。
近年来,国内以中国空气动力研究与发展中心(以下简称气动中心)为代表的多家单位利用小型涡轮动力、复合材料结构、小型数字飞控系统、小型高精度测量传感器及高可靠数据链等技术发展了航空飞行器带动力自主控制模型飞行试验手段,应用于飞机型号研制和关键技术攻关,发挥了重要的作用[6]。
1 国内外缩比模型验证机飞行试验及其应用
1.1国外情况
缩比模型飞行试验是历史悠久的试验技术,开始于20世纪20年代,兴起于20世纪40年代,近20年来受到高度重视,取得了新的发展。
世界航空航天强国历来高度重视模型飞行试验。最早的模型飞行试验始于1920年,NACA从一栋高层建筑上投放一个飞机模型研究其尾旋特性。20世纪40年代,在没有跨声速风洞情况下,英国利用蚊式飞机带飞飞机缩比模型到高空投放,利用模型自由降落加速过程研究跨声速机翼阻力和颤振特性,解决了许多跨声速技术难题。20世纪50年代,美国用火箭助推模型进行了大量机翼零升阻力试验,试验马赫数为2.6,为超声速飞行提供了可靠的气动力数据。1945~1960年期间,NACA在沃罗斯普岛建立了专门的模型飞行试验场,先后制定并执行了近200项研究计划,进行了各种模型自由飞试验共6425次。其中,50%以上属于各类飞行器气动力基础研究工作,仅阻力试验就达1300余次[7]。
缩比模型飞行试验经历了从早期进行的飞机投放模型无动力自由飞行,到后来利用火箭动力助推实现模型跨声速、超声速、高超声速、高高空自由飞行,再到近年来利用带动力及自主控制缩比模型(验证机)开展新概念气动布局以及高新技术先期演示验证的探索及发展过程。
随着现代飞机气动布局不断创新,新概念、新技术不断应用,飞行包线不断拓展以及飞行性能不断提升,应用缩比模型(验证机)对新布局、新概念、新技术以及飞行包线边界进行探索和验证,在解决设计中的技术障碍和难题,实现技术创新等方面发挥了重要作用。为此,缩比模型(验证机)及演示验证技术引起广泛关注和重视,成为飞机设计、气动及飞行试验领域新的热点[8]。
1947年以来的70年间,美国共研制了50多种X系列飞行器,早期以有人驾驶为主,随着自主飞行控制技术的发展,自X-36开始都为无人飞行模式[9]。
按照其作用,X系列技术验证机大致可分为两类:一是以研究或技术验证为目的的飞行器,用于探索新的飞行领域(速度、高度、机动性等)及研究相关气动问题、探索新概念气动布局及关键技术、以及新技术探索和演示验证;二是为了验证系统使用效能的飞行器,如新型号竞争性飞行演示验证飞行器等。以研究或技术验证为目的的X系列飞行器(第一类)项目如表1-表3所示。
下面介绍近年来以航空科学技术突破为重点的几个典型项目。
1.1.1 X-36无尾技术验证机[10-11]
由NASA和波音公司联合研制,是无尾战斗机的28%缩比模型验证机,机长5.55 m,翼展3.175 m,机高0.95 m,空重494 kg,最大起飞重量576 kg,安装一台威廉姆斯国际F112涡扇发动机(最大推力320 kg),最大速度330 km/h。该机采用翼身融合鸭式布局构型,没有垂直尾翼和水平尾翼。其结构主要采用铝合金与石墨复合材料蒙皮,机翼前缘与后缘都具有40°的后掠角。通过无尾设计使其雷达反射面积(RCS)大幅度减小,同时对飞机的飞行敏捷性和高升力特征产生了不利影响。因而X-36采用了分裂式副翼和推力矢量装置进行方向操纵,另外还使用了一种非常先进的单通道数字飞行控制系统来使飞机飞行时保持稳定。
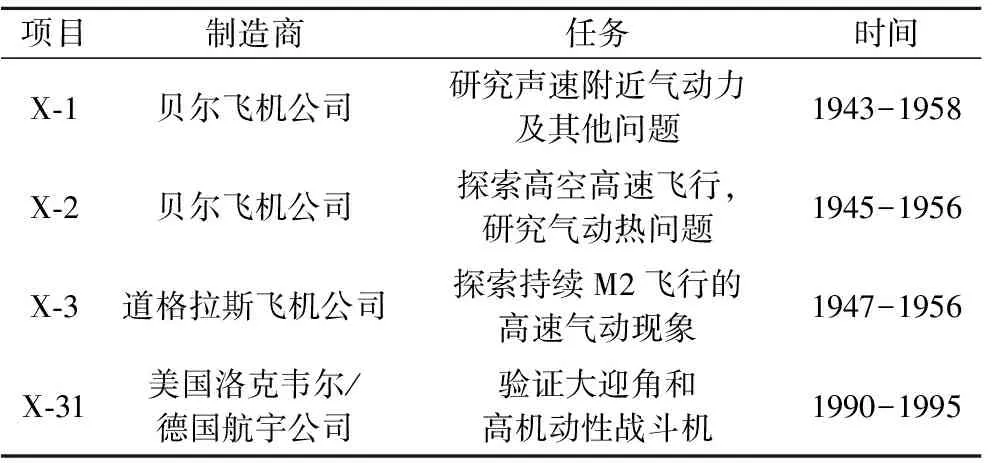
表1 探索新的飞行领域及研究相关气动问题Table 1 Exploration of new flight field and research on aerodynamic problems
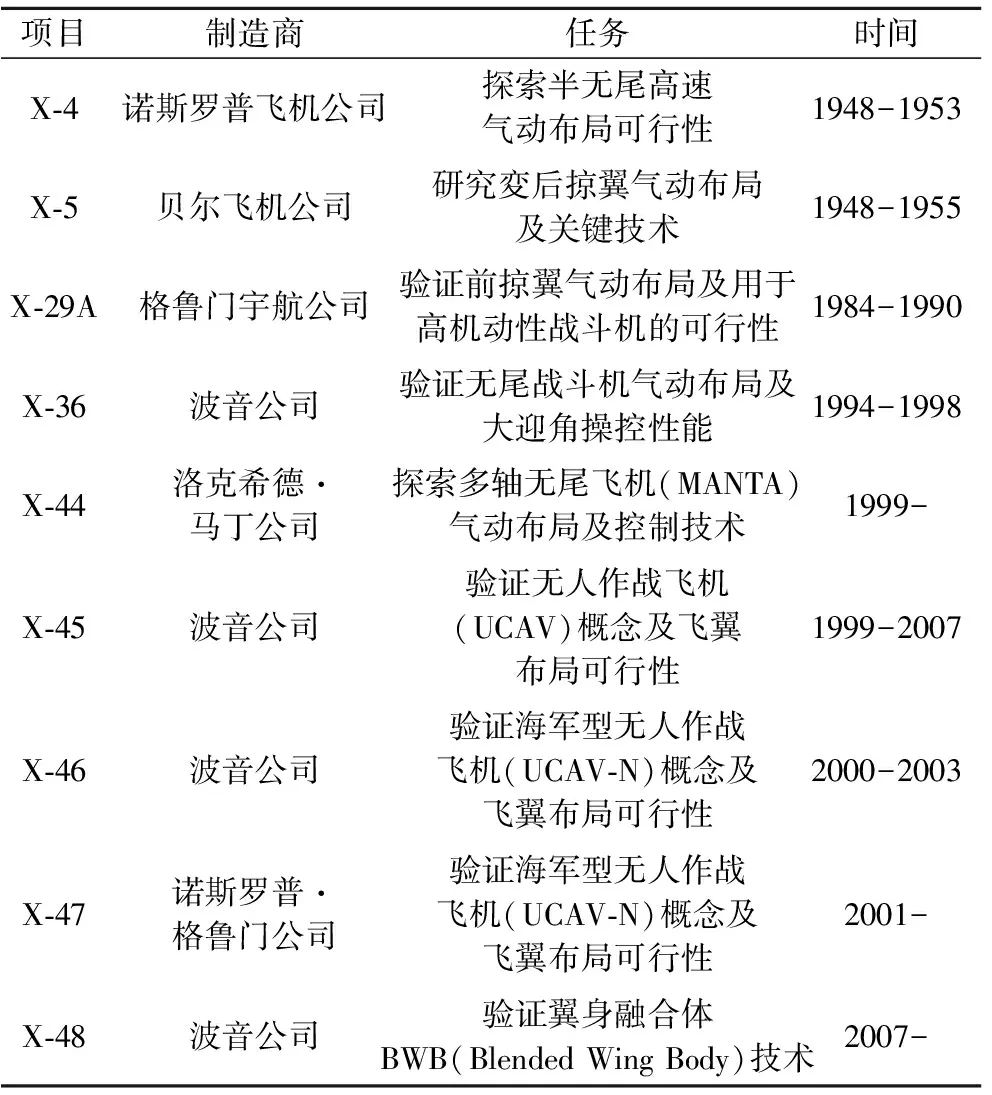
表2 探索新概念气动布局及关键技术Table 2 Exploration of new concept aerodynamic configurations and key technologies
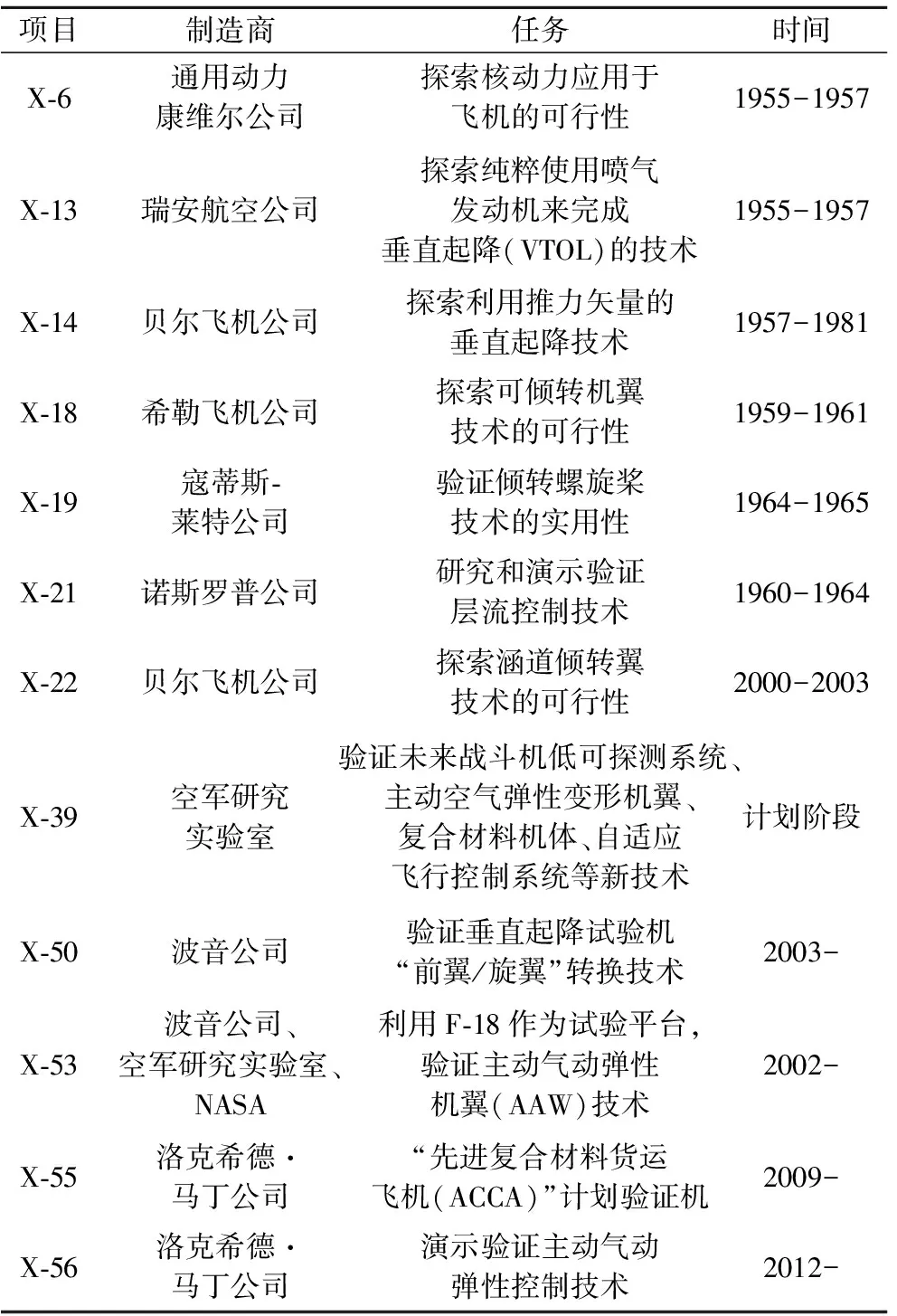
表3 新技术探索和演示验证Table 3 Exploration of new technologies, demonstration and validation
X-36采用常规滑跑起飞和着陆方式,紧急情况下可采用伞降回收。首架X-36于1997年5月17日成功首飞,随后共进行了33次飞行试验,主要验证了使用和不使用推力矢量情况下的飞行敏捷性。当最大迎角为40°,最大过载为4.86g时,X-36飞行依然十分稳定,操控性和机动性也十分出色。该机还演示了利用神经网络飞行控制软件在飞机尾部受损情况下的控制重构功能。
总之,通过X-36项目,研究了无尾布局飞行器的操纵控制和敏捷性,演示验证了推力矢量控制、神经网络控制的效果。
1.1.2 X-48翼身融合体BWB(Blended Wing Body)技术验证机[12-13]
从20世纪90年代开始,NASA的Langley中心、波音公司“鬼怪工厂(Phantom Works)”以及美国空军联合开展了X-48系列飞翼气动布局技术验证机项目,包括A、B、C三种型号,均为未来全尺寸大型运输类飞机的缩比技术验证机。
X-48A项目在1997年~2003年间实施,按照450座级客机14%比例设计,翼展10.7 m,安装3台威廉姆斯公司的J24-8涡喷发动机。原计划2004年试飞,后由于经费前减中止。
2005年9月,在X-48A基础上启动了X-48B项目,于2006年制造了两架8.5%比例(翼展6.4 m)的验证机(图2)。它摒弃了传统运输类飞机“筒形机身+机翼”的气动布局,采用了高度翼身融合的高升阻比无尾布局,其机翼后缘设计了20个操纵面,并在两侧翼梢小翼上设计了方向舵,动力由机身后部的三台推力为222 kg的涡喷发动机提供。自2007年7月20日首飞至2010年项目结束,X-48B共进行92次飞行试验,包括包线扩展试飞、参数辨识飞行、失速特性、单发停车以及参数边界限制功能等科目。通过飞行试验验证了X-48B气动布局的可行性,以及低速飞行状态的操稳和飞行控制特性。
X-48C是对B型机的进一步完善,一是取消了翼梢小翼,在发动机舱两侧增加了两个带后缘方向舵的外倾式垂尾,既保证飞机偏航控制能力,又能屏蔽发动机喷口的侧向噪声;二是更换了动力装置,安装了两台推力为396 kg的荷兰AMT公司JetCat涡喷发动机;三是在机身尾部增加了一个延伸段,能够有效减少发动机传向地面的噪声。X-48C是X-48系列验证机的最后一个型号,也是按照8.5%比例制造,总重量约227kg。自2012年8月7日首飞到2013年4月9日最后一次飞行,X-48C共计进行了30次飞行试验,完成了操稳品质、飞控软件优化,以及噪声、排放、油耗测试等内容。
通过X-48系列技术验证机研究及飞行试验,突破了飞翼布局多操纵面耦合控制的难点,展示了BWB气动布局高升阻比、低噪声、低油耗、低排放等优势,验证了气动布局的可行性。BWB布局技术正逐步成熟,可能代表着下一代大型飞机的重要发展方向。
1.1.3 X-56A主动弹性控制技术验证机[14-15]
X-56A原名为多用途技术试验台(MUTT),是由洛·马公司的臭鼬工厂(Skunk Works)设计,并联合NASA、美国空军研究实验室(AFRL)共同开发的一种创新型模块化技术验证机。它包括2个机身、1套刚性机翼、3套柔性机翼,其机翼和机身可拆卸。该飞行器主要用于研究主动颤振抑制和阵风减缓等主动气动弹性控制技术。
X-56A验证机重约218 kg,在机身尾部上方安装了两台36 kg推力的JetCat P400发动机。每副机翼都有翼梢小翼、4个升降副翼,中心体后部还有襟翼。复合材料机翼被特意设计在扭转方向,以使得在飞行包线范围内发生弯扭耦合模式的颤振。作动器安装在临近每个舵面的干燥舱内,机翼内的其它空间安装有水压载舱,用于稳定性调节。
2013年7月以来,X-56A已进行了十余次飞行,完成了气动性能、控制系统、飞行性能和操纵品质等试验。X-56A采用了自主飞控系统+地面模拟座舱内操纵手的在环控制模式,控制系统及传感器不仅能够预测和感知颤振发生的起点,也能够主动偏转舵面来抑制颤振的进一步发展。
据报道,目前完成的试验与模拟器上的演练飞行基本一致。试验数据能够指导未来柔性机翼控制律的开发,同时用于帮助改进柔性机翼的模型。
X-56A项目对于突破采用大展弦比柔性结构机翼气动布局的非定常气动力及气动弹性问题具有重大意义,目前虽已取得较大进展,但仍然面临诸多挑战,如气动弹性主动控制模型确认与调节技术、传感器系统设计技术、飞控系统设计技术等。
1.2国内情况
国内从20世纪60年代开始发展航空器模型飞行试验技术研究。目前,该领域的主要研究与应用单位有中航工业飞行试验研究院、中航工业各主要飞机设计研究所、中国商飞、航空航天高校、气动中心等单位。过去主要利用无动力及遥控模式进行失速/尾旋飞行试验,先后完成了我国自行研制的数十余个飞机型号的尾旋模型飞行试验,为飞机的定型和真机试飞提供了技术支撑。
近年来,随着自主无人飞行技术的迅速发展,带动力自主控制技术在航空器模型飞行试验及无人机研发中得到了快速和广泛的应用。国内,西工大等利用带动力缩比模型开展了某大型飞机以及长航时太阳能Wi-Fi无人机——“魅影5”的飞行演示验证,其中“魅影5”实现了国内太阳能飞行器16 h的最长滞空时间;中航工业沈阳飞机设计研究所利用带动力自主控制模型开展了某新概念组合动力布局低速演示验证试验;试飞院在飞机带飞投放模型失速/尾旋飞行试验中也应用了增稳及飞控技术;2017年4月,中国商飞针对未来民机发展,实现了采用大边条翼身融合布局的“灵雀B”缩比飞行验证机的成功首飞。
自2013年以来,气动中心在国内率先突破了相关关键技术,建立了航空飞行器带涡喷动力自主控制模型飞行试验手段,开展了多型飞机缩比模型常规气动力、失速/尾旋、过失速机动以及非常规气动布局验证等飞行试验,为三种手段融合的空气动力研究试验体系建立及在飞行器研制中的应用打下基础。
总体上看,以美国为代表的航空工业发达国家的模型飞行试验技术发展已经非常成熟,并得到广泛应用。主要体现在,一是试验类型比较丰富,包括常规迎角气动力试验、大迎角边界飞行状态试验、气动弹性试验、旋翼及垂直起降技术试验、流动控制技术试验、新概念布局及新技术演示验证试验等;二是试验速域宽,覆盖低速、亚跨超声速范围,如采用“浮空器+飞行器”方式,NASA-JPL开展了LDSD(低密度超声速减速器)高空气球搭载试验,JAXA开展了超声速低音爆高空气球投放试验D-SEND;三是具有高精度的飞行试验数据测量系统和先进的参数辨识技术;四是效率高,基本具备常态化试验能力,并且三种手段融合技术广泛应用。
通过近年来的发展,国内航空飞行器模型飞行试验在大迎角边界飞行状态试验技术、气动建模与参数辨识技术、飞行控制技术等方面已到达国际先进水平,但也还存在一些差距:一是试验类型比较少,目前仅限于常规迎角气动力试验、大迎角边界状态试验和新概念布局演示验证试验;二是试验速域目前仅限于低速和亚声速范围;三是飞行试验数据测量精度距参数辨识的要求尚有一定差距,特别是大迎角气流系参数(迎角、侧滑角、空速)测量精度差距较大;四是由于与之相关的航空工业基础比较薄弱,如国内缺乏成熟可靠的小型涡喷发动机系列产品,对模型飞行试验的常态化带来较大影响,同时,三种手段融合技术尚不够完善,应用不够广泛。
2 航空飞行器模型飞行试验主要研究领域及其作用
总体上看,航空飞行器模型飞行试验主要研究领域包括四大类:气动布局演示验证、气动力试验、危险边界飞行试验、新概念新技术演示验证试验。
2.1气动布局演示验证
气动布局设计是航空飞行器设计研制过程中的首要和关键环节,气动布局是决定航空飞行器飞行操稳、隐身特性以及载荷能力等核心性能的关键之一。为了大幅提升这些性能,新一代飞机将在气动布局上进行大胆的创新和突破,如采用翼身高度融合、气动与隐身特性高度融合、大幅放宽静稳定性等设计。不同于传统布局形式,新型气动布局特性仅仅依靠地面试验和数值计算难以获得充分可靠的确认和验证。
开展缩比模型飞行试验,可以获取并验证新气动布局飞机的操稳和飞行特性,对耦合控制模式及控制律设计进行验证,使得地面模型得到验证和优化,大大降低研制风险。
2.2气动力试验
随着基于MEMS的高精度测量技术和气动力参数辨识方法的不断发展,气动力试验已经成为航空器模型飞行试验的重要研究领域之一,成为与数值计算、风洞试验可以互相比较、验证的一种气动力获取手段。航空飞行器模型飞行试验每架次可以开展多种状态下多个激励飞行动作。每个激励动作可以针对不同构型、不同飞行状态参数,通过参数辨识获取该飞行状态下的稳定导数、操纵导数、动导数,以及大迎角飞行状态下的非定常气动力特性等,信息量丰富、费效比高[16]。气动力试验要取得好的试验结果,需要着重加强测量和辨识两个方面的研究:提高测量精准度可以大大提高气动力辨识的精准度;发展闭环飞行下的气动激励方法可以涵盖纵航向静不稳定等更广范围,满足更多类型飞行器的气动力辨识需求。
2.3危险边界飞行状态试验
失速/尾旋、过失速机动等危险边界飞行,往往伴随着大迎角非线性非定常气动特性、高动态运动等复杂气动和运动耦合问题,地面手段难以精确建模计算和试验模拟,模型飞行试验是模拟解决危险边界飞行问题的有力手段[17]。通过模型飞行试验,可以有效研究和获取飞行器失速/尾旋特性,验证尾旋改出方法。针对先进战斗机过失速机动问题,模型飞行试验可以研究并获得非线性非定常气动特性,对地面试验及建模结果进行验证、修正。借助推力矢量系统,还可以验证过失速机动操纵方法和控制律设计,大大降低研制及真机试飞风险。
2.4新概念新技术演示验证试验
进入21世纪以来,伴随气动、控制、电子、材料、动力等新技术快速发展和新一代飞行器研制需求,创新成为驱动航空航天飞行器发展的主要动力,变形体布局、气动隐身高度融合布局、流体推力矢量、倾转旋翼、倾转动力、分布式推进、环量增升减阻控制、弹性主动抑制、动力系统进排气一体化、无人编队飞行、无人智能飞行、噪声抑制、超声速降噪减阻等大量新概念、新技术不断被提出来。模型飞行试验是演示验证这些新概念、新技术的有效手段,是评估/验证技术成熟度的重要途径,是架构地面模拟试验与真实飞行试验的纽带和桥梁,是加速研究成果工程应用转化的一种低成本和低风险的手段。
3 航空飞行器模型飞行试验关键技术发展趋势
3.1带动力自主控制模型飞行试验技术
综合近年来国内外发展情况,从无动力到带动力模型,从带飞投放到水平起飞/着陆,从无控或人工遥控飞行到自主控制飞行,已经是航空器模型飞行试验不可逆转的发展趋势。
带动力自主控制试验模式,避免了伞降回收对模型外形的破坏或损坏,保证了外形精度,省去了模型维修时间,大大提高了试验效率。带动力飞行,使得每架次飞行可以开展数量更多的机动动作,水平起降安全回收使得模型可重复使用,试验数据量相比传统无动力投放模式大大增加,所得结果更可信。自主控制飞行,可以精确控制试验条件,保证结果的精度及可重复性。带动力自主控制飞行使得可开展的试验类型更丰富、包线范围更宽,大大提高了飞行试验的范围和能力。带动力自主控制带来的效率和能力提升,使得模型飞行试验可与数值计算、风洞试验一起构成空气动力学研究三种手段融合的闭环研究体系,大大提高气动及其相关技术的综合研究能力[18]。
带动力自主控制带来能力极大提升的同时,也使得模型飞行试验系统构成越来越复杂,模型飞行试验总体设计技术成为其中关键环节。且静不稳定构型飞行控制、过失速机动、推力矢量系统等新的关键技术亦对模型飞行试验总体设计提出了更高要求。
气动中心在国内率先建立了带动力、自主控制模型飞行试验总体设计技术手段,解决了多约束条件下的相似参数设计、动力系统选型及推力矢量设计、多构型质量特性参数匹配、试验状态及主要模拟参数等多个总体设计要素强耦合的难题。
3.2模型快速结构设计与制造技术
缩比模型飞行演示验证试验区别于型号和真实飞机设计与研制的一个主要特点是低成本、短周期,需要在较短周期内对某项或多项气动及其相关关键技术进行快速、低成本和低风险的验证。加上模型结构要求强度高、质量轻、质量(惯矩)分布模拟准确、复合材料工艺复杂等,对快速模型结构设计与制造提出了很高要求。随着复合材料工艺、多轴加工中心、多材料3D打印技术、先进计算机辅助设计工具等的快速发展,缩比模型结构设计与制造周期大大缩短。目前,采用机载设备和零部件虚拟布置、结构材料面密度体密度准确建模、质量质心和惯矩预先准确设计与建模、结构强度刚度计算模拟测试、模型零部件虚拟装配、起落架系统动力学模拟等技术,能够快速设计出满足总体及各分系统技术要求的电子样机。根据电子样机,加工制造方能够借助多轴加工中心、3D打印技术等快速完成模具制造、复合材料成形、模型零部件加工与装配等工作,大大提高了缩比模型制造效率,缩短了缩比模型研制周期[19]。气动中心在缩比模型结构设计与制造中就充分利用了UG、CATIA等计算机辅助设计工具建立全数字化电子样机,利用金属3D打印技术快速完成大型模具工装及部分复杂零件的制造,利用三轴、五轴加工中心完成复杂金属零部件的快速加工制造,掌握了玻璃钢、碳纤维、高强度泡沫等复合材料快速成形工艺。
3.3模型动力系统设计与测试技术
如前文所述,缩比模型飞行试验主要的研究领域之一就是危险边界飞行试验,其中一项重要内容是大迎角过失速机动气动及控制研究。由于大迎角过失速机动飞行气动舵面效率降低,需要发动机提供推力矢量进行辅助控制。在缩比模型上设计效率高、对飞机本体气动特性影响小的小型推力矢量系统,是开展过失速机动飞行试验的一项关键技术[20]。气动中心针对某型战斗机缩比模型,设计了一种小型柔性双环推力矢量系统,在国内首次成功开展了该模型的过失速机动飞行试验,包括“眼镜蛇”机动、大迎角稳态飞行、“直升机”机动、大迎角绕速度矢360度滚转机动以及赫伯斯特机动。另外,随着气动隐身高度融合布局成为新一代飞行器的主要气动布局形式,缩比模型动力系统必须综合考虑背负式、内埋式S弯进气道以及S型圆转方喷管等设计,设计时既要保证发动机进排气损失尽量小,又要保证进排气形成的翼上压力分布变化尽量不破坏原型飞机的气动力/力矩特性,因此缩比模型发动机和进排气系统一体化设计与地面测试技术成为未来航空器模型飞行试验的关键技术之一,需要引起足够重视和开展大量研究工作。
3.4模型飞行控制设计与测试技术
飞行控制技术是缩比模型飞行试验的关键核心技术之一。随着模型飞行包线的不断拓展:飞行速度拓展到亚跨超声速,飞行高度拓展到最大约12km,左边界拓展到失速/过失速范围,静稳定拓展到静不稳定等,传统的人工遥控模式已不能满足模型飞行控制的要求。需要建立自主起/降控制、自主导航巡航控制、自主试验机动控制、自主故障诊断与处置、多模态自主管理等飞行控制技术体系,才能成功开展宽包线模型飞行试验任务。在飞行控制律设计方面,不仅需要掌握传统的PID、根轨迹、频率响应等设计及验证方法,还需要针对大迎角飞行的非线性非定常气动特性,采用诸如动态逆、自适应、鲁棒控制等现代控制律设计方法,这对飞行控制系统设计与验证亦提出了极大挑战[21]。气动中心利用动态逆方法在国内首次成功开展了某型战斗机模型大迎角过失速机动试验,利用失速/尾旋自主控制进入和改出方法,成功开展了某型战斗机失速/尾旋试验[22]。为确保试验可靠性和安全性,飞行控制系统设计、地面测试与验证技术,特别是地面数字仿真、半实物仿真等技术也是其中的关键技术之一。
3.5高精度测量与气动参数辨识技术
随着翼身高度融合、飞翼等气动布局在飞行器研制中的广泛应用,风洞试验洞壁、支架干扰的扣除和修正技术成为试验的难点,模型飞行试验因在大气中自由飞行恰恰不受这些干扰因素影响,而且模型飞行试验还具有飞行包线宽、兼顾动态试验等优势[23]。因此,可以预见,模型飞行试验将成为获取宽包线范围飞行器准确气动力模型的重要手段之一。要达到这一目标,需要从气动力参数辨识技术和飞行参数高精度测量两个方面开展深入研究。
当前,气动力参数辨识方法发展迅速,气动中心针对静不稳定飞机模型,发展了针对闭环控制的多通道最优输入激励信号设计方法以及基于方程解耦技术的气动参数辨识最大似然法,实现了带动力自主控制缩比模型常规迎角飞行气动力参数的有效辨识。
在飞行参数测量方面,目前的航空飞行器模型飞行试验普遍采用基于MEMS技术的惯性参数传感器,并同时兼顾控制和测量需要。虽然MEMS惯性参数传感器技术近年来取得较大发展,鉴于其体积小、功耗低的优势,已广泛应用于手机、汽车、小型无人机等领域,但是其测量精度相比现代的激光陀螺、光纤陀螺等相对较低,只能满足一般飞行控制的要求,离参数辨识需要的高精度气动数据要求尚有一定的差距。为了提高参数获取精度,可以在大量典型运动状态仿真的基础上,根据各运动轴方向飞行参数(姿态角、角速率、过载等)的量级,对传感器在各运动轴方向的量程进行设计和订制,或按照测量范围,针对不同量程安装多个传感器,以提高测量精度。
下面给出气动中心开展某典型飞机模型飞行试验在无测量误差和有测量误差两种情况的仿真辨识结果比较。对于有测量误差情况,根据当前MEMS传感器水平,测量误差采用表4所列传感器测量精度范围内的零均值均值均匀分布随机噪声。
3.5.1 纵向机动
采用升降舵双偶极方波激励,图4给出了有测量误差情况下的辨识拟合结果。表5列出了在升降舵激励下的纵向气动参数辨识结果,由图4和表5可见:
1) 辨识拟合结果与仿真数据符合较好;
2) 无测量误差情况下,气动参数辨识结果与仿真所用的真值一致;
3) 给定测量误差水平下,起主要作用的气动参数(CA0、CN0、CNα、Cmα、Cmδe)的辨识结果较好,最大偏差在5%以内;俯仰阻尼导数Cmq偏差约5%;起次要作用的气动参数(CAδe、CNδe)的偏差较大,超过10%。
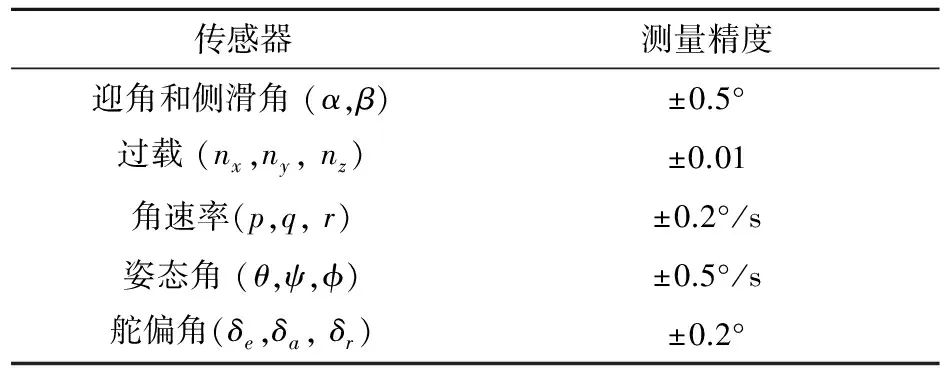
表4 传感器测量精度Table 4 Measurement precision of sensors
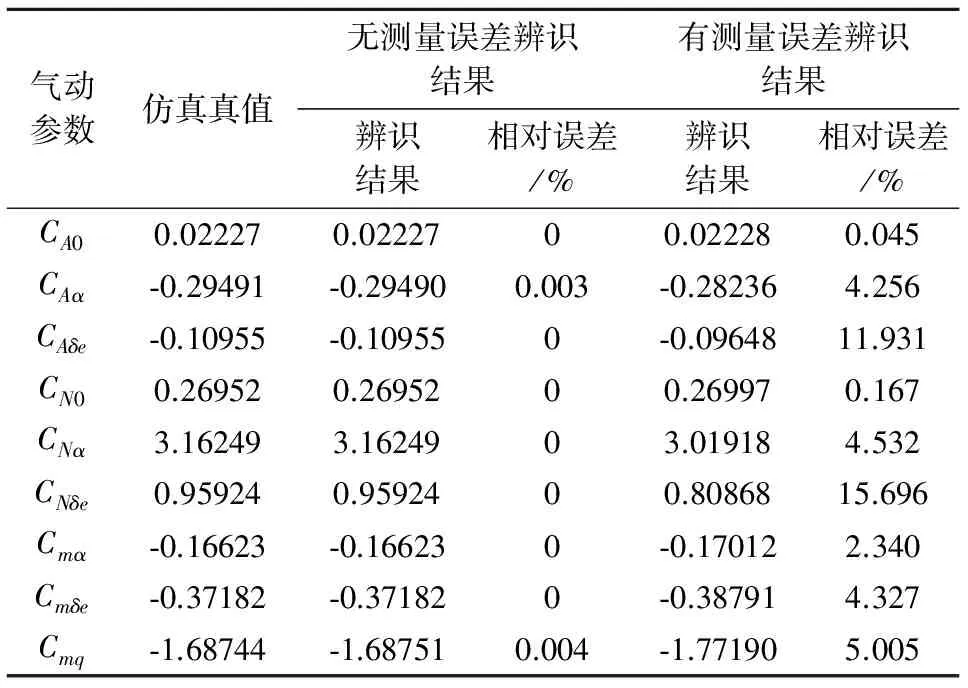
表5 纵向气动参数仿真辨识结果Table 5 Simulation identification results of longitudinal aerodynamic parameters
3.5.2 横侧向机动
采用副翼双偶极方波激励。表6列出了在副翼激励下的横侧向气动参数辨识结果,图5给出了有测量误差情况下的辨识拟合结果。由表6和图2可见:
1) 辨识拟合结果与仿真数据符合较好;
2) 无测量误差情况下,气动参数辨识结果与仿真所用的真值一致;
3) 给定测量误差水平下,侧向力导数辨识结果误差较大,这是由于侧滑角和侧向过载响应较小,相对误差较大所致;滚转角速率响应幅值显著大于偏航角速率,滚转力矩导数辨识结果总体上优于偏航力矩导数;起主要作用的气动参数(Clβ、Clδa、Cnδr)的辨识结果较好,最大偏差在5%以内;动导数中,滚转阻尼导数辨识结果较好,偏航阻尼导数结果误差较大,交叉导数辨识结果误差基本不可辨识。
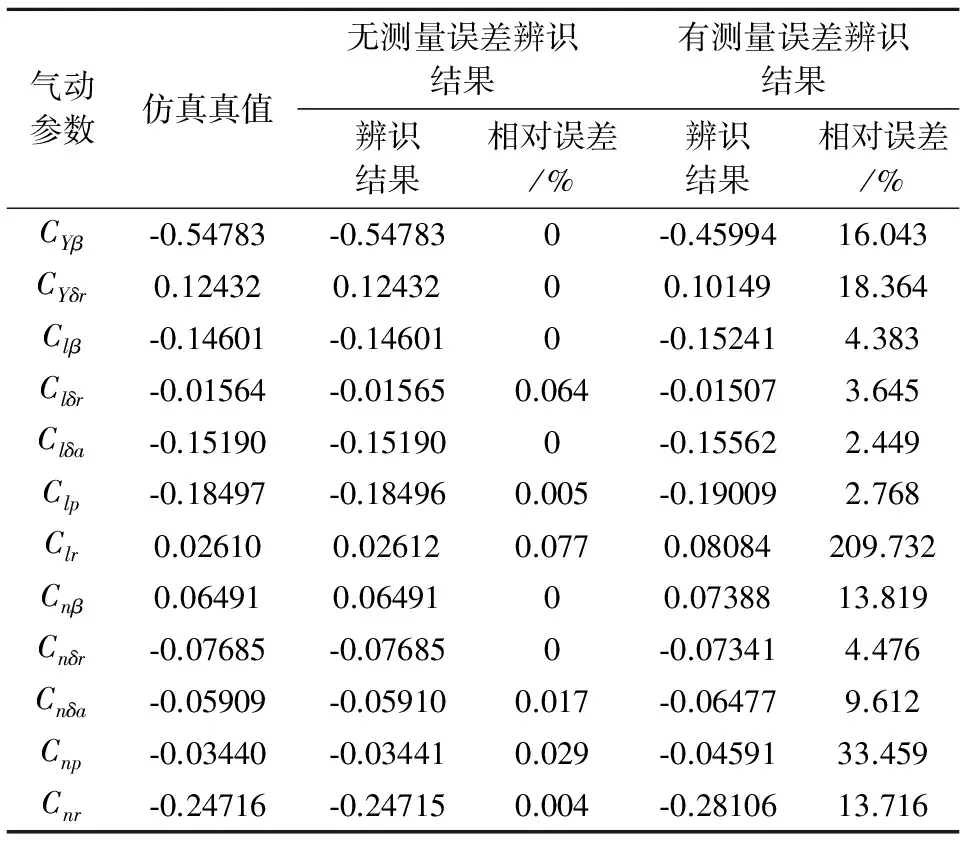
表6 横侧向气动参数仿真辨识结果Table 6 Simulation identification results of lateral aerodynamic parameters
4 研究展望
本文以模型飞行试验对飞行器研制以及空气动力学研究发展的重要推动作用为出发点,对带动力自主控制航空器模型飞行试验国内外研究现状进行了介绍,对其关键技术进行了分析和总结,其技术发展重点和应用研究发展方向为:
1) 飞行试验平台技术发展方面,随着CAD快速建模、先进复合材料、先进制造、小型涡喷发动机、数字飞控系统、MEMS传感器、小型数据链路、气动参数辨识等相关技术的快速发展,航空器模型飞行试验能力和效率不断提升:模型设计、加工和装配周期缩短,模型全自主飞行控制开展试验的能力增强,飞行测量数据精度大幅提高,获取试验数据信息量更加丰富。
2) 模型飞行试验应用研究将向高精度测量与辨识、跨超声速、边界飞行状态(过失速机动、颤振等)研究及演示验证方向发展。进一步,模型飞行试验作为空气动力学三种手段之一,与风洞试验和CFD数值计算构建起空气动力学的闭环研究体系,综合解决航空器研制、气动研究中的关键气动问题。同时,航空器模型飞行试验还将向与气动相关的如新概念布局验证、气动新技术、飞行控制律验证、结构气动弹性研究、新概念推力矢量、新概念流动控制等新领域不断扩展和应用。
虽然模型飞行试验目前还存在一些不足,如模型近似性存在偏差、测量装置和测量手段没有其他试验丰富、容易受气象条件影响等,但随着大量气动新布局、新概念、新技术的提出,利用模型飞行试验手段验证地面研究结果、揭示气动机理、验证技术可行性、提升技术成熟度的相关需求越来越多,模型飞行试验手段的作用日益凸显。
[1]Ralph D K. Flight testing of fixed-wing aircraft[M]. Beijing: Aviation Industry Press, 2012. (in Chinese)
拉尔夫·D 金伯林. 固定翼飞机的飞行试验[M]. 北京: 航空工业出版社, 2012.
[2]Zhang S Y. Model free flight test[M]. Beijing: National Defense Industry Press, 2002. (in Chinese)
张守言. 模型自由飞试验[M]. 北京: 国防工业出版社, 2002.
[3]Ryan P S, Brian A. Design and flight testing of a 15% dynamically scaled HL-20 vehicle model[C]. 50th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition. Nashville: AIAA, 2012: 1-10.
[4]Peng X B. The View of China’s flight prototype strategy from X series flights (Part I)[J]. Aerospace Industry Management, 2013, 1, 38-40. (in Chinese)
彭小波. 从X系列飞行器看我国“样机”战略(上)[J]. 航天工业管理, 2013, 1, 38-40.
[5]Peng X B. The View of China’s flight prototype strategy from X series flights (Part II)[J]. Aerospace Industry Management, 2013, 1, 38-40. (in Chinese)
彭小波. 从X系列飞行器看我国“样机”战略(下)[J]. 航天工业管理, 2013, 2, 32-35.
[6]He K F, Liu G, Zhang L H, et al. Research progress on model flight test of powered aircraft with autonomous control system[J]. Journal of Experiments in Fluid Mechanics, 2016, 30(2): 1-7. (in Chinese)
何开锋, 刘刚, 张利辉, 等. 航空器带动力自主控制模型飞行试验技术研究进展[J]. 实验流体力学, 2016, 30(2): 1-7.
[7]David F F. Fifty years of flight research: an annotated bibliography of technical publications of NASA Dryden flight[R]. NASA/TP-1999-206568, California: NASA Dryden Flight Research Center 1946-1996, 1999.
[8]Zhang W, Guo Q, Zhang Y Z. Study and evolvement on flight test technique of remotely piloted subscale model[J]. Advances in Aeronautical Science and Engineering, 2011, 2(1): 43-47. (in Chinese)
张炜, 郭庆, 张怡哲. 缩比模型遥控飞行验证技术的研究及展望[J]. 航空工程进展, 2011, 2(1): 43-47.
[9]Wei C.Study on the prototype strategy of aerospace vehicle explore[D]. Harbin: Harbin Institute of Technology Master Dissertation, 2014.12. (in Chinese)
魏畅. 飞行器型号研发中的样机战略研究[D]. 哈尔滨: 哈尔滨工业大学硕士学位论文, 2014.12.
[10]Laurence A W. Flight testing the X-36 the test pilot’s perspective[R]. Missouri: Boeing AS&T Phantom Works St. Louis, 1997.
[11]Harris W J. Subsystems integration for the X-36 aircraft[J]. Aerospace Engineering, 1998, 18(4), 31-35.
[12]Brian R T. X-48B preliminary flight test results[R]. NASA technology Report, 2009.
[13]Liebeck R H. Design of the blended wing body subsonic transport[J]. Journal of Aircraft, 2004, 41(1): 10-25.
[14]Ryan J J, Bosworth J T, Burken J J, et al. Current and future research in active control of lightweight flexible structures using the X-56 aircraft[C]//AIAA SciTech 52nd Aerospace Sciences Meeting, 2014
[15]Jared A G, Matthew J B. Aeroelastic modeling of X-56A stiff-wing configuration flight test data[C]//AIAA Atmospheric Flight Mechanics Conference. Grapevine: AIAA, 2017: 1-22.
[16]Hu C C, Lan C E, Brandon J. Unsteady aerodynamic modeling for maneuvering aircraft[R]. AIAA 93-3626-CP, 1993.
[17]Goman M G, Khramtsovsky A V, Kolesnikov E N. Evaluation of aircraft performance and maneuverability by computation of attainable equilibrium sets[J]. Journal of Guidance, Control, and Dynamics, 2008, 31(2): 329-339.
[18]An Y J, Jiang H J, Zheng H. Design and implementation of test system for trop model test with an engine[J]. Measurement & Control Technology, 2015, 34(6): 132-135. (in Chinese)
安玉娇, 江辉军, 郑浩. 带动力模型自由飞试验测试系统设计与实现[J]. 测控技术, 2015, 34(6): 132-135.
[19]Yu Z F, Song W B, Qian J J, et al. Technology of parametric wing modeling based on CATIA[J]. Aircraft Design, 2000, 30(3): 27-30. (in Chinese)
于哲峰, 宋文斌, 钱晶晶 等. 机翼几何外形的CATIA 参数化建模实现方法[J]. 飞机设计, 2000, 30(3): 27-30.
[20]Song L, Huang J. The study of engine system selection for sub-scaled UCAV flight test model[J]. Aircraft Design, 2010, 12(6): 38-42. (in Chinese)
宋磊, 黄俊. 无人机缩比验证机动力选型研究[J]. 飞机设计, 2010, 12(6): 38-42.
[21]Wang B, Zhan H. Design criteria of remotely controlled dynamically similar model(DSM) and its flight control systems(FCS)[J]. Computer Simulation, 2014, 31(6): 108-110,182. (in Chinese)
王斑, 詹浩. 遥控缩比验证模型及其飞控系统设计准则[J]. 计算机仿真, 2014, 31(6): 108-110,182.
[22]Chen H, He K F, Qian W Q. L1 adaptive augmentation for high angle of attack nonlinear control of fighter[J]. Control and Decision, 2017, 32(8): 1403-1408. (in Chinese)
陈海, 何开锋, 钱炜祺. 基于扩展L1自适应的战斗机大迎角非线性控制[J]. 控制与决策, 2017, 32(8): 1403-1408.
[23]Wang Q, Qian W Q, He K F. Aerodynamic parameter identification and optimal input design for missile[J]. Journal of Astronautics, 2008, 29(3): 789-793. (in Chinese)
汪清, 钱炜祺, 何开锋. 导弹气动参数辨识与优化输入设计[J]. 宇航学报, 2008, 29(3): 789-793.
Demonstrationandvalidationflighttestofscaledaircraftmodelanditskeytechnologies
HE Kaifeng1,2, MAO Zhongjun2,*, WANG Qing1,2, CHEN Hai2
(1.StateKeyLaboratoryofAerodynamics,Mianyang621000,China; 2.ChinaAerodynamicsResearchandDevelopmentCenter,Mianyang621000,China)
Firstly, the flight tests and its application of scaled aircraft models at home and abroad are introduced in this paper. The study topics are summarized as follows: the demonstration and validation of aerodynamic configurations, the flight test of aerodynamic forces, the flight test of dangerous boundaries, as well as the demonstration and validation test with new concepts and technologies. Secondly, this paper analyzes the key technologies of model flight test such as powered flight with autonomous control, quick model structure design and manufacture, model power system design and test, flight controller design and test, high precision measurement, and aerodynamic coefficients identification. Some results of CARDC (China Aerodynamics Research and Development Center) research on these key technologies are shown. Finally, the potential development directions of model flight test are prospected.
scaled model flight test; aerodynamic research; aerodynamic coefficients identification; demonstration and validation
V217
A
10.7638/kqdlxxb-2017.0089
0258-1825(2017)05-0671-09
2017-05-17;
2017-09-20
何开锋(1963-),男,四川成都人,研究员,研究方向:飞行力学与模型飞行试验. E-mail:hekf@vip.sina.com
毛仲君*(1979-),四川简阳人,硕士,主要从事航空器模型飞行试验总体设计. E-mail: despmatrix@163.com
何开锋, 毛仲君, 汪清, 等. 缩比模型演示验证飞行试验及关键技术[J]. 空气动力学学报, 2017, 35(5): 671-679.
10.7638/kqdlxxb-2017.0089 HE K F, MAO Z J, WANG Q, et al. Demonstration and validation flight test of scaled aircraft model and its key technologies[J]. Acta Aerodynamica Sinica, 2017, 35(5): 671-679.
