基于MATLAB的A柱双目障碍角的测量与计算
2017-11-01叶方标李继东毛荣琴
叶方标,李继东,毛荣琴,王 勇
基于MATLAB的A柱双目障碍角的测量与计算
叶方标1,李继东2,毛荣琴3,王 勇1
(1.重庆车辆检测研究院有限公司国家客车质量监督检验中心,重庆 401122;2.东风柳州汽车有限公司商用车品质保证部,广西 柳州 545000;3.重庆长安汽车股份有限公司重庆长安汽车工程研究院,重庆 401120)
在GB 11562-2014的基础上,依托A柱双目障碍角所满足的几何位置关系采用MATLAB进行编程,并采用MATLAB的GUI功能编制计算软件。试验结果表明,该方法能快速地得到A柱双目障碍角的数值。
前方视野;A柱;双目障碍角;MATLAB;GB 11562-2014
驾驶员前方视野一直以来是公告检测、认证型式试验及出口认证必检项目。作为汽车安全评价指标之一,驾驶员前方视野是否满足标准要求至关重要[1-6]。前方视野的检测依据为GB 11562-2014《汽车驾驶员前方视野要求及测量方法》[7],其中A柱双目障碍角是衡量前视野的一个重要指标[8-10]。针对试验过程中A柱双目障碍角的计算比较复杂[11-13],本文基于MATLAB编制一个简易软件,能够大幅度地提高试验效率。
1 测量原理
按照GB 11562-2014要求,在车上安装好三维“H”点装置,调节座椅行程和靠背角,双目障碍角的测量原理如图1所示,其中:R点为车辆制造商为每一乘坐位置规定的设计点;P点为驾驶员观察其眼睛所在的水平面内的目标时头部转动的中心点(用P1、P2表示);Pm点为通过R点的纵向铅垂面与P1、P2连线的交点;A柱S1截面:从Pm点向前作与水平面向上成2°的平面,过此平面与A柱相交的最前点作水平截面;A柱S2截面:从Pm点向前作与水平面向下成5°的平面,过此平面与A柱相交的最前点作水平截面。
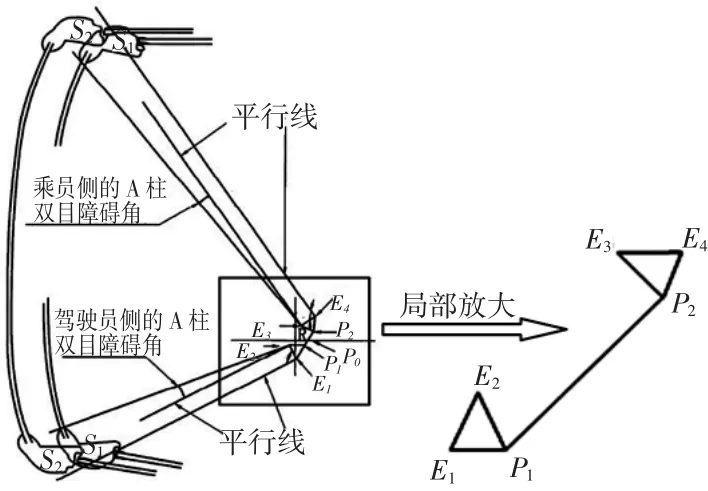
图1 GB 11562-2014双目障碍角测量原理图
将S1、S2截面投影到P点所在的水平面内,双目障碍角在该平面内测量。驾驶员侧A柱的双目障碍角定义为通过E2与过E1点的S2截面外缘的切线相平行的直线和通过E2点的截面S1内缘的切线在水平面上的夹角,如图1所示,测量时将E1和E2的连线绕P1旋转,使E1至左A柱的S2截面外侧的切线与E1、E2连线成直角;乘客侧的A柱的双目障碍角定义为通过E3点的S1截面内缘的切线和通过E3点与过E4点的S2截面外缘的切线相平行的直线之间的夹角,如图1所示,测量时将E3和E4的连线绕P2旋转,使E3至右A柱的S1截面内侧的切线与E3、E4连线成直角。
针对E1、E2与P1点,E3、E4与P2点,均在同一个水平面上,且相互位置关系如图2所示。
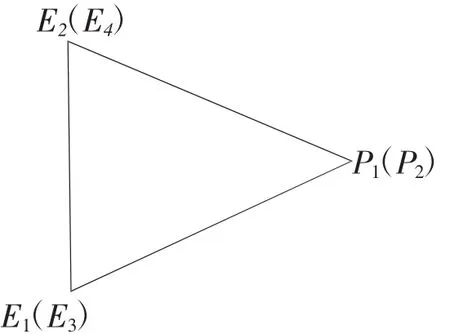
图2 E点与P点相对位置关系
若驾驶员侧A柱与乘客侧A柱相对车辆中央纵向铅锤面是对称的,则乘客侧的A柱双目障碍角不需要再次测量。本文以驾驶员侧的A柱双目障碍角为研究对象进行分析说明。
首先过P1点作圆1,半径r1=P1E1=104 mm;过P1点作圆2,半径r2=P1E=E1E2/2=65/2 mm。其中P1点、S1点、S2点位置固定,E1、E2与P1满足图2的相对位置关系,在测量A柱双目障碍角的过程中需要将△E1E2P1绕P1点旋转,使得E1点满足S2E1⊥E2E1。
下面说明:过S2作圆2的切点E点,S2E与圆1的交点E1即为测量双目障碍角所要寻找的E点,满足S2E1⊥E2E1。E点为圆2的切点,满足S2E⊥P1E,过P1点作E1E2的垂线P1E0,由于△E1E2P1为等腰三角形,满足P1E2=P1E1,可以得到E0为E1E2的中点。根据△E1E0P1与△E1EP1均为直角三角形,而且P1E=E1E0,从而有E0P1=E1E,从而根据平行四边形判定准则,可以得出E1点满足S2E1⊥E2E1。
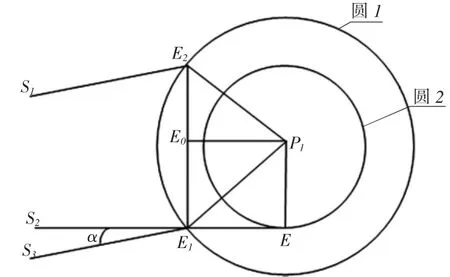
图3 A柱双目障碍角测量原理
需要说明的是,过S2作圆2的切线,存在二个切点E,图3中E点对应的E1、E2、P1三者的位置关系满足图2的要求,而另一个切点得到的E1、E2、P1的位置关系并不满足图2的要求,所以需要舍弃。
过E1点作S1E2的平行线S3E1,则夹角∠S2E1S3即为双目障碍角α。
2 MATLAB计算夹角及案例分析
在双目障碍角的测量过程中,S1、S2、R这3个点的坐标均是用三坐标测量仪直接打出来,而P点相对R点的位置关系在GB 11562-2014中已经给出。设S1点坐标为(xS1,yS)1,S2点坐标为(xS2,yS)2,P1点坐标为(xP1,yP)1。圆1半径r1=104 mm,圆2半径r2=32.5 mm,下面首先求解E点坐标为(xE,yE)。

根据点E在圆2上满足P1E=37.5

根据式(1)和式(2)采用 MATLAB计算可得E点坐标 (xE, yE)。
采用定比分点公式计算E1点的坐标。根据计算得到的E点坐标可以得到S2E的长度,从而E1分线段S2E的比λ1

E1点坐标(xE1,yE)1由定比分点公式可得


从而E2点坐标 (xE2, yE2)由定比分点公式可得:

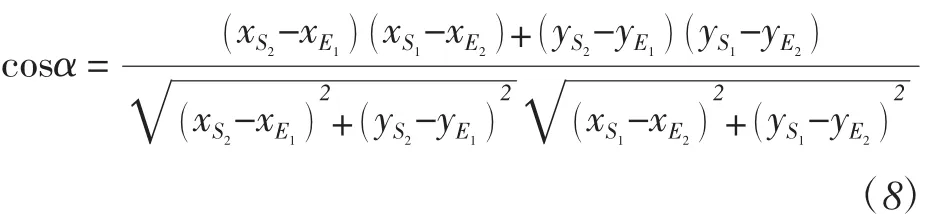
从而双目障碍角α根据式(8)计算可得。
本文采用重庆车辆检测研究院有限公司生产的三维“H”点装置和眼点装置、海克斯康测量技术(青岛)有限公司生产的三坐标测试仪Stinger IIi进行A柱双目障碍角试验验证。试验现场照片如图4所示。

图4 驾驶员前视野测量
首先测量基准点R的坐标和座椅靠背角,根据GB 11562-2014标准修正细则得到驾驶员侧的P点坐标,然后测量驾驶员侧的S1截面内侧切点坐标和S2截面外侧切点坐标。测点的三维坐标数据如下:R(1 318,-355,367);722,-604,1 104);67,-685,1 028),单位为mm。
因为在计算A柱双目障碍角时,所有点均投影到水平面,故而只需要用到测点的x及y坐标。
采用MATLAB编制GUI(Graphical User Interface)程序,将上述R、S1、S2点的测量数据输入软件,点击”Calculate Angel and Plot Result”按钮计算,得到双目障碍角如图5所示,所绘制的测点位置如图6所示。
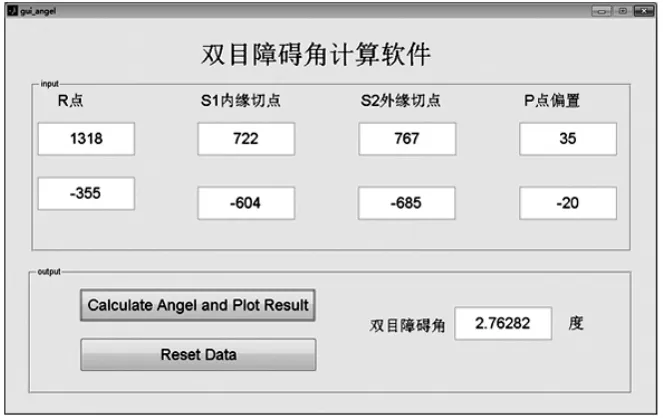
图5 双目障碍角MATLAB计算结果
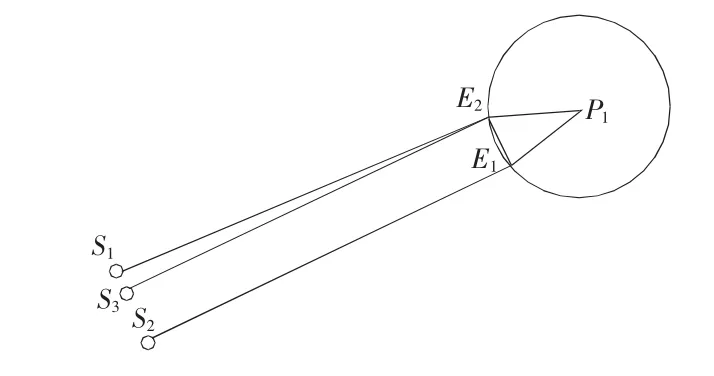
图6 测点位置图
计算可得该车驾驶员侧的双目障碍角α=2.8°,小于5°,满足 GB 11562-2014 的要求。
3 结束语
本文依托GB 11562-2014,对前视野中的A柱双目障碍角进行分析,根据其满足的相互位置关系采用MATLAB编程进行计算得到A柱双目障碍角的数值,并进一步结合MATLAB的GUI功能编制计算程序,将测点数据采用程序直接计算,大大简化计算过程,提高试验效率。
[1]罗长亮.基于不同设备的驾驶员前方视野测量方法分析[J].电子世界,2014(18):343-344.
[2]张雄,刘兆贤.汽车驾驶员前视野测量装置的优化设计及应用[J].客车技术与研究,2011,33(6):39-41.
[3]王金松.汽车前方视野测量与评价研究[J].南方农机,2015,46(9):51-51.
[4]覃星翠,康意谊,李辉,等.减小乘用车A柱障碍角的设计方法及应用[J].装备制造技术,2015(9):29-31.
[5]李辉,覃星翠.车辆A柱双目障碍角与实际视野障碍大小的差异分析[J].企业科技与发展,2014(8):44-45.
[6]吴映辉,吴宇嘉.乘用车A柱盲区视窗系统研究与应用[J].公路与汽运,2016(6):6-8.
[7]全国汽车标准化技术委员会.汽车驾驶员前方视野要求及测量方法:GB 11562-2014[S].北京:中国标准出版社,2014.
[8]杜子学,伍毅.乘用车A柱盲区的校核方法[J].汽车工程师,2012(1):34-38.
[9]张志波,苑林,谢东明,等.汽车驾驶员前方视野测量及评价[J].汽车技术,2013(4):46-49.
[10]蔡艳春,黄佐贤.汽车视野的测试研究[J].汽车技术,1994(10):10-16.
[11]阮浩峰,赵毅,张琼,等.基于UG的A柱障碍角量化分析[J].上海汽车,2014(3):45-49.
[12]黄金陵,汪成应.汽车视野设计CAD系统开发及应用[J].汽车工程,1997(1):20-28.
[13]徐云,游四海.三坐标测量机在汽车前方视野检测中的应用[J].重庆理工大学学报(自然科学版),2003,17(6):22-23.
Measurement and Calculation of the A Pillar Obstruction Angle Based on MATLAB
Ye Fangbiao1,Li Jidong2,Mao Rongqin3,Wang Yong1
(1.NationalBusQualitySupervision&InspectionCenter,ChongqingVehicleTest&ResearchInstitute.Chongqing401122,China;2.CommercialVehicleQualityAssuranceDepartment,DongfengLiuzhouAutomobileCo.,Ltd,Liuzhou545000,China;3.Chongqing Chang-anAutomobileEngineeringResearchInstitute,ChongqingChang-anAutomobileCo.,Ltd,Chongqing401120,China)
On the basis of GB 11562-2014 and by the aid of the satisfied geometric relation of the A pillar obstruction angle,the authors use MATLAB to program and use MATLAB GUI function to program the calculation software.The test results show that the proposed method can quickly obtain the value of the A pillar obstruction angle.
forward visibility;A pillar;obstruction angle;MATLAB;GB 11562-2014
U462.2;
A
1006-3331(2017)05-0057-03
叶方标(1989-),男,硕士;主要从事汽车整车研究及性能检测工作。
修改稿日期:2017-05-02
