安全人机工程学原理在巷道工程设计中的研究应用
2017-10-23王长军
宋 恒,王长军
(1.广西中金岭南矿业有限责任公司, 广西 来宾市 545900; 2.长沙矿山研究院有限责任公司, 湖南 长沙 410012)
安全人机工程学原理在巷道工程设计中的研究应用
宋 恒1,王长军2
(1.广西中金岭南矿业有限责任公司, 广西 来宾市 545900; 2.长沙矿山研究院有限责任公司, 湖南 长沙 410012)
矿山开采机械化程度越来越高,原有的巷道设计无法满足铲运机的通行要求,导致经常发生铲运机与巷道边帮碰撞。针对该问题,从安全人机工程学的角度出发,对铲运机与巷道发生碰撞的原因进行分析,并提出改进设计方案,从而降低碰撞事故的发生几率,确保井下通行安全
安全人机工程学;巷道工程设计;斜坡道;交通信号
矿山开采是传统行业,自上个世纪五六十年代开始,国内矿山逐步实现机械化开采,随着近年来矿山开采规模的不断扩大,越来越多的大型化、专业化及智能化工程设备陆续投入到开采作业中。根据以往技术经验所做的井巷工程设计,已无法满足现代化井下设备使用的要求。此外,由于矿山开采设计侧重于考虑满足使用要求,而忽略了作业人员与机械设备及周边环境之间的协调关系。不仅影响作业人员和设备的运行效率,还可能导致安全事故发生。因此,有必要运用安全人机工程学原理,对矿山井巷工程设计方案进行完善,从减少事故发生,提高工作效率。
1 安全人机工程学概述
安全人机工程学是从安全的角度和着眼点研究人与机关系的一门科学,其立足点放在安全上面,以活动过程中的人实行保护为目的,主要阐述人与机器及环境之间保持怎样的关系,才能保证人的安全。也就是说,在实现一定的生产效率的同时,如何最大限度的保证人的安全健康与舒适愉快。因此需要从活动者的生理、心理等多方面因素出发,研究能够保证其安全健康所需采取的方法、手段、设备或其他工程措施。其目的是尽量满足舒适和安全的使用需要,实现“以人为本”的人性化设计思想。
2 巷道事故原因分析
2.1 事故巷道情况介绍
某矿山采用盘区机械化上向水平分层充填采矿法。井下开采过程中,大量使用铲运机进行铲矿及出渣作业。受铲运机工人操作水平、设备故障及井下作业环境等多方面因素影响,使用铲运机运输过程中,经常发生铲运机与巷道边帮碰撞,导致设备损坏和人身伤害事故,对井下安全生产构成极大影响。

图1 碰撞位置示意
该矿山井下-400 m中段N13#穿脉与斜坡道交叉口处(见图1)曾发生多次铲运机与巷道边帮碰撞事故,发生碰撞点主要集中在图中①和②处,在③和④两处各发生一起较严重的碰撞事故。
2.2 事故原因分析
根据事故轻重程度、碰撞位置及碰撞前铲运机行驶状态,笔者对该岔道口2014年发生碰撞事故的情况进行了统计(见表1)。根据事故统计情况可知,铲运机上行过程中主要与平巷外侧边帮(图1中①区域)发生碰撞,且多以轻微刮擦为主,仅有一次碰撞在转弯相反方向的平巷外侧(图1中④区域);铲运机下行过程中主要与斜坡道外侧边帮(图1中②区域)发生碰撞,且碰撞位置集中在铲运机前轮刚好通过降坡起点处,斜坡下行一段距离后(图1中③区域)铲运机与巷道发生碰撞并造成人员受伤。
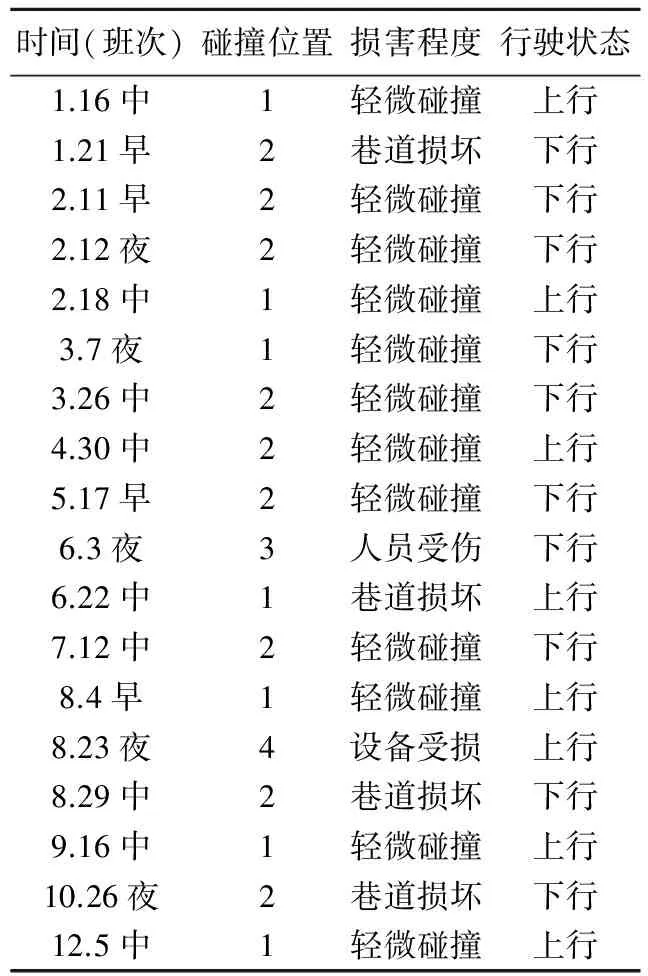
表1 碰撞事故统计(2014)
针对碰撞事故发生的特点,笔者从巷道设计、设备情况、作业环境及操作工的生理和心理等角度出发,对事故原因进行分析,主要原因有如下几点:
(1) 巷道设计存在缺陷。该事故岔道口处平巷及斜坡道的设计规格虽然都满足铲运机通过的要求,且转弯处的转弯半径略大于铲运机最小转弯半径,但由于铲运机转弯后要立即转入斜坡,因而造成下行时,铲运机转弯后直接进入下坡,铲运机前轮刚好通过降坡起点处,受惯性影响,铲运机加速下冲,转向不及时,便容易在斜坡道外侧(图1中②区域)发生碰撞事故;铲运机上行过程中,操作工往往有加速冲坡的习惯,当以较快车速从斜坡道转入平巷,又未及时进行减速操作,就容易撞到平巷的外侧(图1中①区域)。
(2) 铲运机“带病”作业。该岔道口处发生的碰撞事故中,仅有一例导致人员受伤,经事后调查,事故铲运机在上一班次使用过程中,操作工已经发现转向操控装置存在反应迟钝现象,但由于维修人员未及时对铲运机进行检查维修,接班操作工发机前没有对铲运机进行日常安全检查,直接开机作业。当铲运机经过转弯进入斜坡后,方向回正迟缓,导致铲运机下行一段距离后(图1中③区域)与巷道边帮发生碰撞。
(3) 现场作业环境不利因素。该岔道口位于穿脉内,距离主巷较远,现场照明条件较差,铲运机通过时主要靠自带灯光照明;接近转弯处没有设置引导性转向志牌;该斜坡道上下口处没有交通信号灯,容易发生上、下行铲运机在斜坡道内相遇情况;斜坡道局部边帮有裂隙渗水想象,且斜坡道上有少量松渣未及时清理。
(4) 操作人员自身因素影响。操作人员的生理和心理等因素及当班的精神状态对其操作的准确性和及时性有极大的影响。受人体视觉观察范围影响,水平视野最佳识别区为±20°,坐着时垂直视野最佳观察区域为0°~-15°。操作工在驾驶铲运机通过该岔道口处时,要同时兼顾转弯和上、下坡操作,短时间内存在观察不到位或视觉盲区。此外,根据事故统计情况,发生在中夜班的碰撞事故明显多于早班,这就与人的生理因素影响密不可分。受生物钟影响,夜晚和凌晨时人的精力较差,经常从事夜班工作,可能会因睡眠不足导致免疫力降低,呼吸困难和四肢乏力等症状。经过对转弯相反方向的平巷外侧(图1中④区域)发生的碰撞事故的调查,发现当班铲运机工属于疲劳驾驶,铲运机上坡后未及时进行转向操作,察觉后误打方向所致。
3 巷道转弯处的改进设计
针对上述可能导致铲运机运行中与巷道发生碰撞的原因,提出了基于安全人机工程学的巷道改进设计。新的巷道设计中,着重对以下几方面进行改进:
(1) 设置缓冲区。在水平巷道转弯与斜坡道降坡点之间,增设平坡缓冲区,缓冲区长度大于铲运机长度,便于铲运机调整车速,并方便操作人员观察前方行驶路线。
(2) 启用交通信号指挥系统。在各中段(分段)平巷进入斜坡道前的转弯入口处,设置交通信号指挥灯,及时反映斜坡道的通行情况,便于即将驶入斜坡道的铲运机操作人员了解斜坡道的通行情况,提前做出判断,采取必要的避让措施或直接通行。
(3) 增加通行引导标识。在井下巷道的转弯、交叉口及斜坡道出入口处,设置醒目的通行引导标识,并配必要的文字说明,确保人员和车辆安全的同时,提高通行效率。
(4) 改善作业环境。加强对井下巷道尤其是转弯和交叉口附近的照明管理,既要保证照明充足又不能因为光源安装不合理对铲运机操作人员造成不良影响;同时要加强井下巷道和斜坡道的日常清理,避免积水和堆放杂物,影响人员或车辆通行安全。
此外,还要加强铲运机操作工的技能培训和日常派班管理工作,要求操作人员能够掌握设备操作要领及应急处置方法,熟悉井下作业环境;管理人员派班前要对作业人员精神状态进行确认,确保人员、设备和环境都处于良好状态,从而保证安全生产。
按改进后的设计方案施工后,井下铲运机在通过类似交叉口处时与巷道发生碰撞事故明显减少,且一年多来未发生过人员和车辆伤害事故。
4 结 语
(1) 矿山开采的机械化程度会越来越高,井巷工程设计必须根据开采设备的变化而不断更新。
(2) 从安全人机工程学角度出发,对铲运机与巷道发生碰撞事故原因进行分析,并提出了改进的设计方案。
(3) 按改进设计施工的巷道,在满足使用功能的同时,充分考虑了作业人员与机械设备及周边环境之间的协调关系,从而达到了通行安全与效率的统一。
[1]张荣立,等.采矿工程设计手册[M].北京:煤炭工业出版社,2010.
[2]欧阳文昭,廖可兵.安全人机工程学[M].北京:煤炭工业出版社,2002.
[3]阳富强,吴 超.基于人机工程学的银行ATM设计[J].工业安全与环保2007,33 (3):45-47.
[4]舒 丹.交通信号控制及指挥系统在矿山井下斜坡道的应用[C]//中西部第三届有色金属工业发展论坛论文集,2010:86-90.
[5]单文娟,景国勋,刘 军.安全人机工程学在确定合理巷道断面尺寸的应用[C]//中国职业安全健康协会2008年学术年会论文集,2008:37-39.
[6]郑学召,罗振敏,王伟峰.基于安全人机工程学的矿山应急救援多媒体系统设计[J].煤炭工程,2011(07):21-24.
2017-01-07)
宋 恒(1982-),男,采矿工程师,注册安全工程师,主要从事矿山开采和安全管理工作,Email:27853930@qq.com。
