基于单片机的全数字化MSK调制器设计与实现∗
2017-10-23霍君君王永斌
霍君君 王永斌 刘 华 刘 桐
(海军工程大学电子工程学院 武汉 430033)
基于单片机的全数字化MSK调制器设计与实现∗
霍君君 王永斌 刘 华 刘 桐
(海军工程大学电子工程学院 武汉 430033)
针对长波通信MSK调制器小型化的问题,分析了MSK调制的基本原理;根据MSK调制的特点,分析了传输数据与连续相位码元波形之间的对应关系,设计了一种基于调用码元波形样值数据的MSK信号数字化调制方法;利用Matlab对此调制方法建模仿真,以ARMCortex-M7微控制器为核心,结合外扩的SDRAM芯片和DAC902芯片等数字芯片搭建MSK调制的硬件平台,验证其可行性。实验结果表明此方法降低了MSK调制器的复杂度,实现了小型化的全数字化MSK调制。
MSK调制;微控制器;相位连续;小型化
ClassNum ber TP311
1 引言
随着通信技术迅速发展,传统通信系统的容量已经越来越不能满足当前用户的要求。在可用频带资源紧张的情况下,如何在较小的频宽实现较高的频带利用率,从而解决频率资源短缺的问题显得至关重要[1~3]。
电磁波在甚低频(VLF)段具有很强的绕射和穿透能力,传播衰减较小,通常用来进行超远程通信。但是由于甚低频频带较窄,因此一般采用连续相位调制即MSK调制,其具有包络恒定、占用相对较窄的带宽和相干解调等优点,被广泛地应用于长波通信系统中[4~6]。
通常调制信号的带宽和信号的相位是否连续有着直接的关系[7],因此研究连续相位的全数字化MSK调制就很有必要。
2 系统功能与结构
全数字化MSK调制器基于ARMCortex-M7微控制器的STM32F7核心板、SDRAM芯片和DAC902芯片,实现对SD存储卡中的数据信息的任意基带频率的MSK调制。ARMCortex-M7微控制器根据预先设定的参数,产生并存储经MSK调制后的波形样值数据。SD卡用于用户存储数据信息,以备ARMCortex-M7微控制器调用。微控制器调用二进制码元序列,通过判别规则输出对应的波形样值数据,然后输入DAC902芯片完成数模转换。全数字化MSK调制器系统组成框图如图1所示。
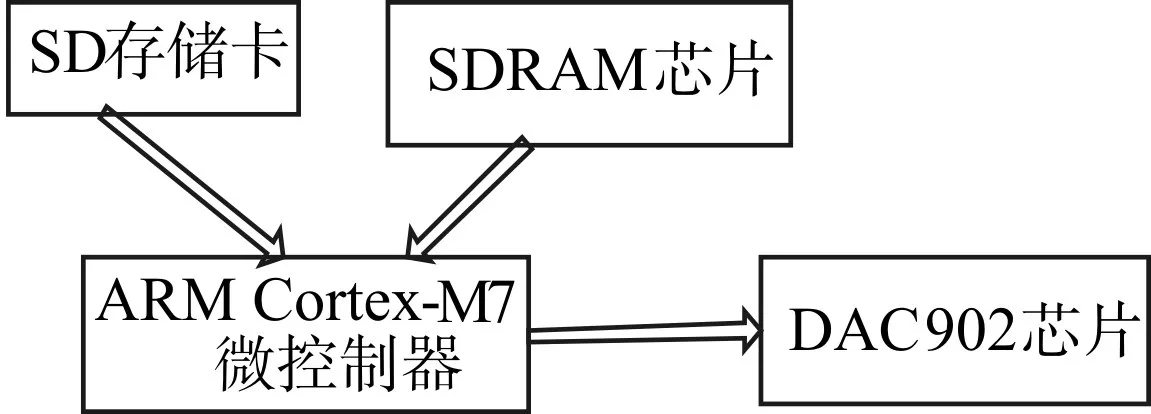
图1 全数字化MSK调制器系统组成框图
3 软件设计
MSK是一种包络恒定、相位连续、且带宽最小并且严格正交的2FSK信号,由于带宽利用率较高,因此适合甚低频通信[8~10]。
一般将MSK信号用下面表达式表示
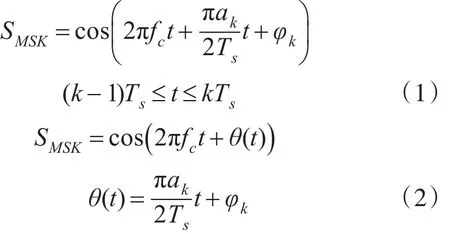
式(1)中,fc为载波频率,Ts为码元宽度,ak为第k个码元相位常数,相位常数φk,θ(t)为附加相位常数,表示MSK信号的总相位减去随时间线性增长的载波相位而得到的剩余值。其中第k个码元的相位θ(t)不仅和当前输入ak有关,而且和前一码元的相位φk-1及ak-1有关,所以MSK信号的前后码元之间存在相关性。在用相干法接收时,可以假设的初始参考值等于0。此时,由式(1)可知
φk=0或 π(mod 2π)
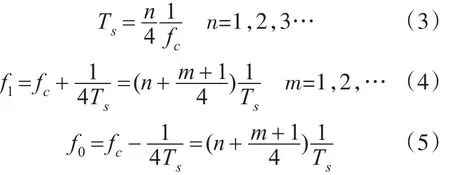
当输入码元为1时,ak=+1,码元频率 f1等于fc+1/(4Ts);当码元输入为0时,ak=-1,码元频率f0等于fc-1/(4 Ts)。因此f1和f0的差等于1/(2 Ts)。MSK信号每个码元持续时间Ts内包含的波形周期数必须是1/4载波周期的整数倍[11]。
故有:
当n=1,m=4时,对于比特“1”和“0”,一个码元持续时间分别有2.25个和1.75个正弦波周期。波形相位连续的一般条件是前一码元末尾的总相位等于后一码元开始时的总相位。在码元持续时间内第k个码元的附加相位,变化(akπ)/2,即变化±π/2。故每经过一个码元的持续时间,MSK码元的附加相位就会改变±π/2;若ak=+1,则第k个码元的附加相位就会增加π/2;若ak=-1,则第k个码元的附加相位就会减小π/2。假设数据序列为ak=+1,+1,-1,-1,+1,+1,+1,-1,则相位常数 φk与ak的关系如表1所示。
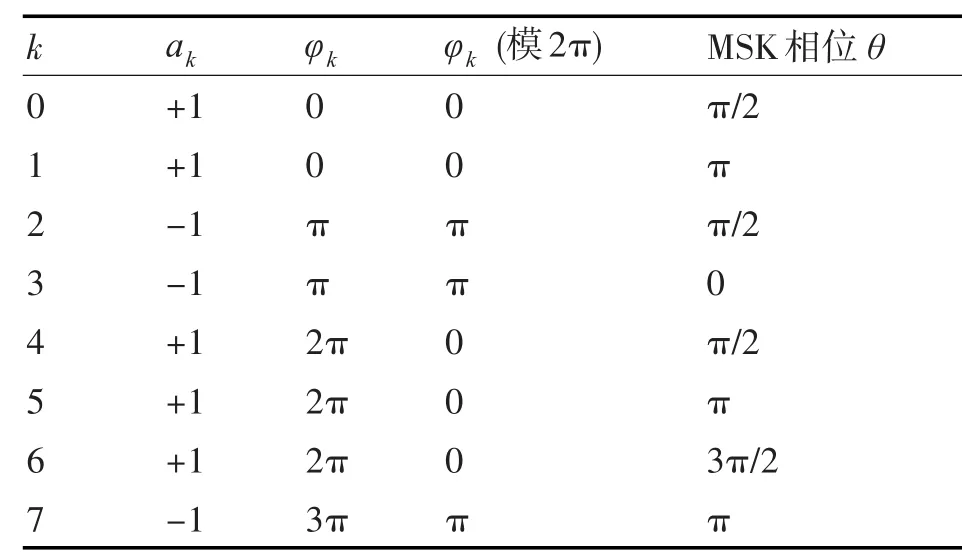
表1 MSK信号φk与ak的关系
当输入码元为+1时,控制器对 f1正弦序列取值,并做一次相位累加;当输入码元为-1时,控制器对 f2正弦序列取值,并做一次相位累减。对于第一个码元,信号的初相位按零度开始,每个码元信号的初始相位按前一个码元的末相位计算。对于 f1和 f2正弦序列可根据图2所示的正交调制方法编程产生[12]。
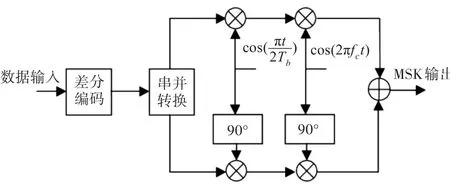
图2 MSK正交调制框图
4 全数字化MSK调制器的硬件实现
4.1 硬件电路
硬件电路主要采用可编程的数字芯片完成,具体芯片采用STM32F7核心板、SDRAM芯片和DAC芯片完成。STM32F7核心板采用的是自带双精度硬件浮点单元(DFFPU)STM32F76x,整个芯片的容量为32M字节。DAC芯片采用DAC902,这款芯片是高性能转换器,能提供12位分辨率的高速度模拟转换器,拥有很高的无杂散动态范围(SFDR),同时它低功耗的特点多应用在便携式和电池供应系统中[13]。
图3 硬件电路
4.2 MSK信号的产生
根据MSK信号的基本原理,当n=1,m=4时其满足以下两个特点:
1)数据+1对应一个频率,四种码元,如图4的前四种波形,数据-1对应一个频率,四种码元如图4的后四种波形。
2)数据由-1到+1或者由+1到-1时信号的相位连续。
图4 八种基本码元波形图
针对这两个特点,按图2给出的MSK正交调制框图进行调制器设计,如图4所示,当n=1,m=4时,若ak=1,则第k个码元的波形有4种情况,标记为c0c1c2c3,对应附加相位改变为π/2,π,3π/2,0;若ak=-1,则第k个码元的波形也有4种情况,标记为c4c5c6c7,对应附加相位改变为3π/2,π,π/2,0。根据图2的正交调制方法采用软件编程产生MSK信号的8种波形样值数据。为了产生高精度的MSK信号,选用高时钟频率、自带双精度硬件浮点单元(DFFPU)的STM32F76x核心板,大容量的SDRAM芯片。
根据MSK调制的特点,在分析传输数据与相位连续的码元波形之间的关系的基础上,设计了数字频率合成的MSK调制方式,如图5所示,同时提出码元选择方法,如图6所示。
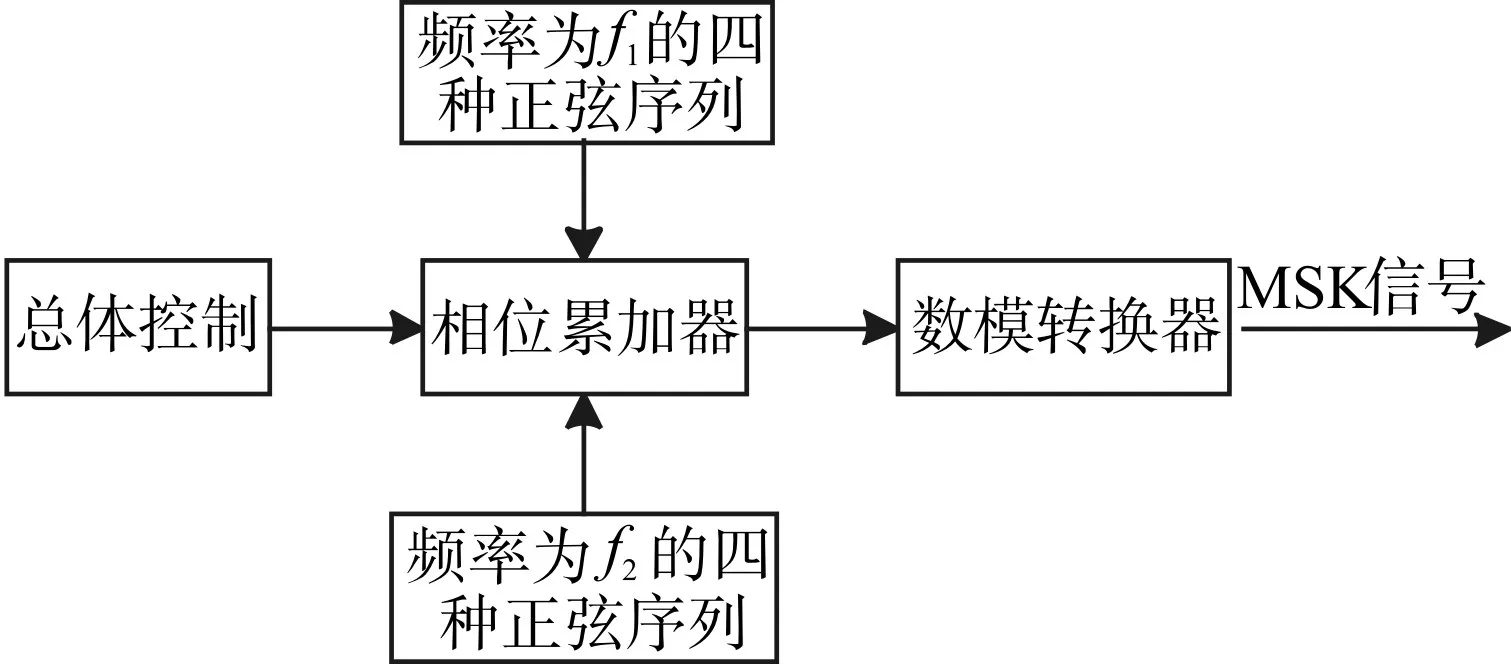
图5 数字频率合成方法产生MSK信号框图
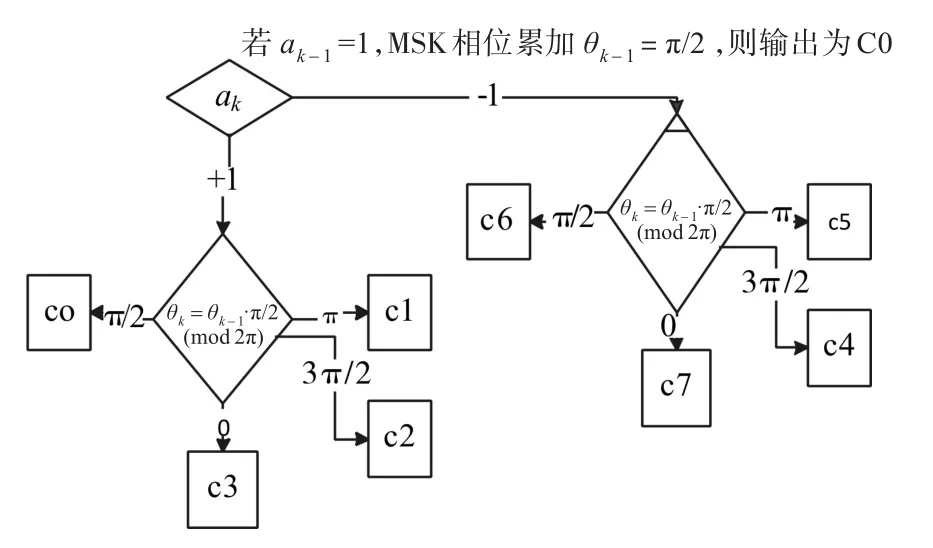
图6 码元选择方法
全数字化MSK调制中,每传送一个码元,附加相位就会进行一次累加,其相位值和下一个码元共同决定下一个码元要传送的正弦序列,然后再输出到数模转换器,如图7所示。
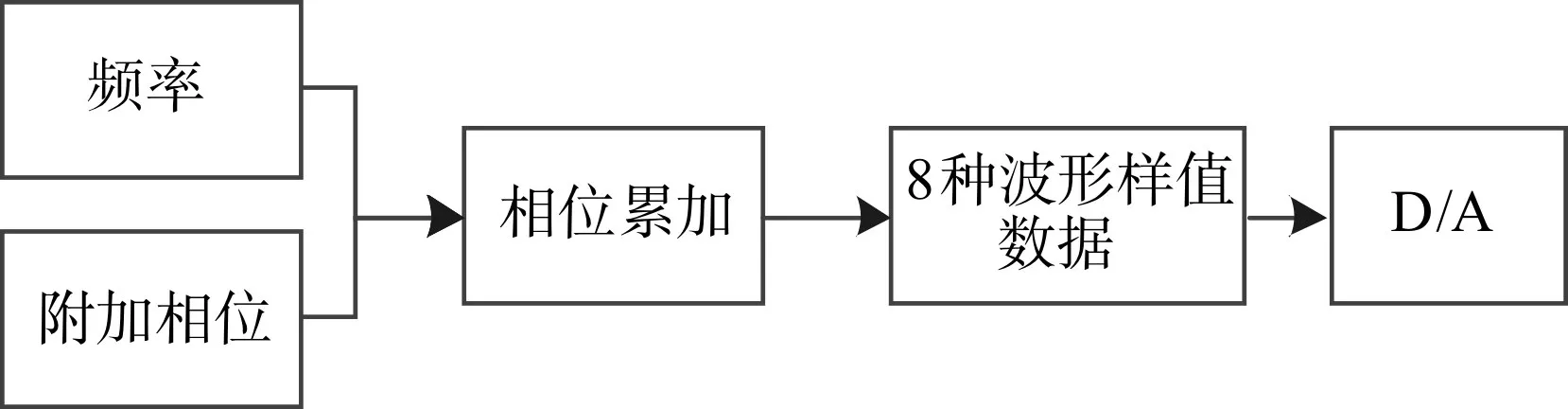
图7 输出特定频率框图
在MSK调制器的硬件电路搭建完成后,根据图8所示的流程图进行编程。
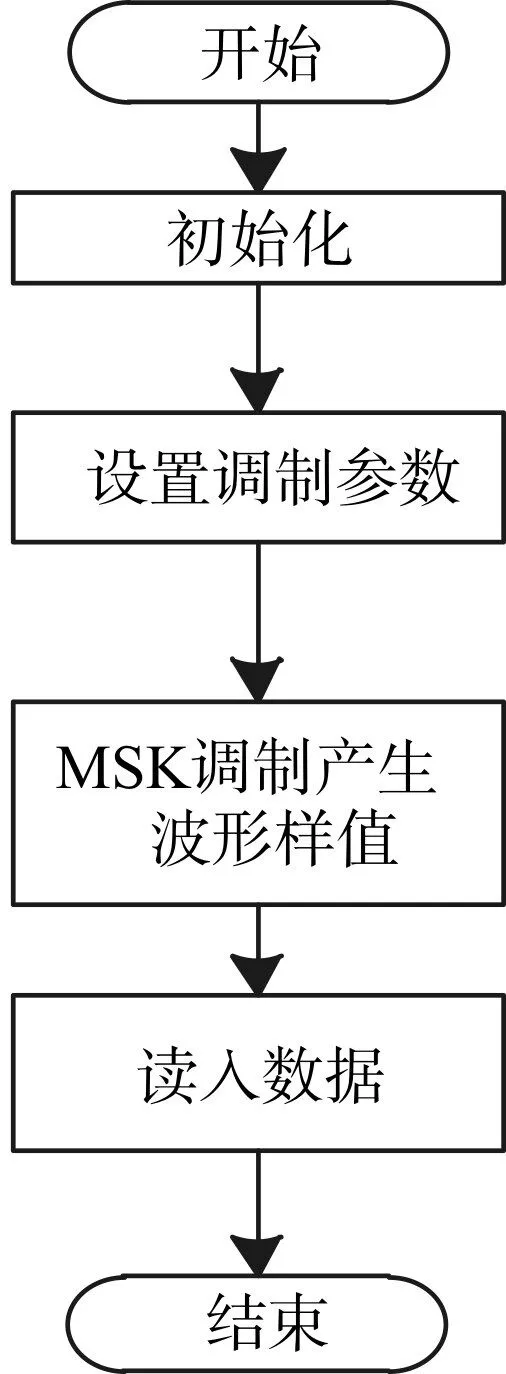
图8 MSK调制器程序流程图
5 MSK调制器的测试
测试的参数设置如下:载波为1kHz,采样率为10 kHz,波特率为50bps,仿真得到的MSK信号波形,如图9所示。同时MSK调制器的输出波形,如图10所示
由图10可知,载波频率为1kHz,采样率为10kHz,每个点的延迟时间为10ms,与Matlab仿真得到的波形相比存在很多毛刺,但经相干解调得到的数据信号与原数据信号相同。
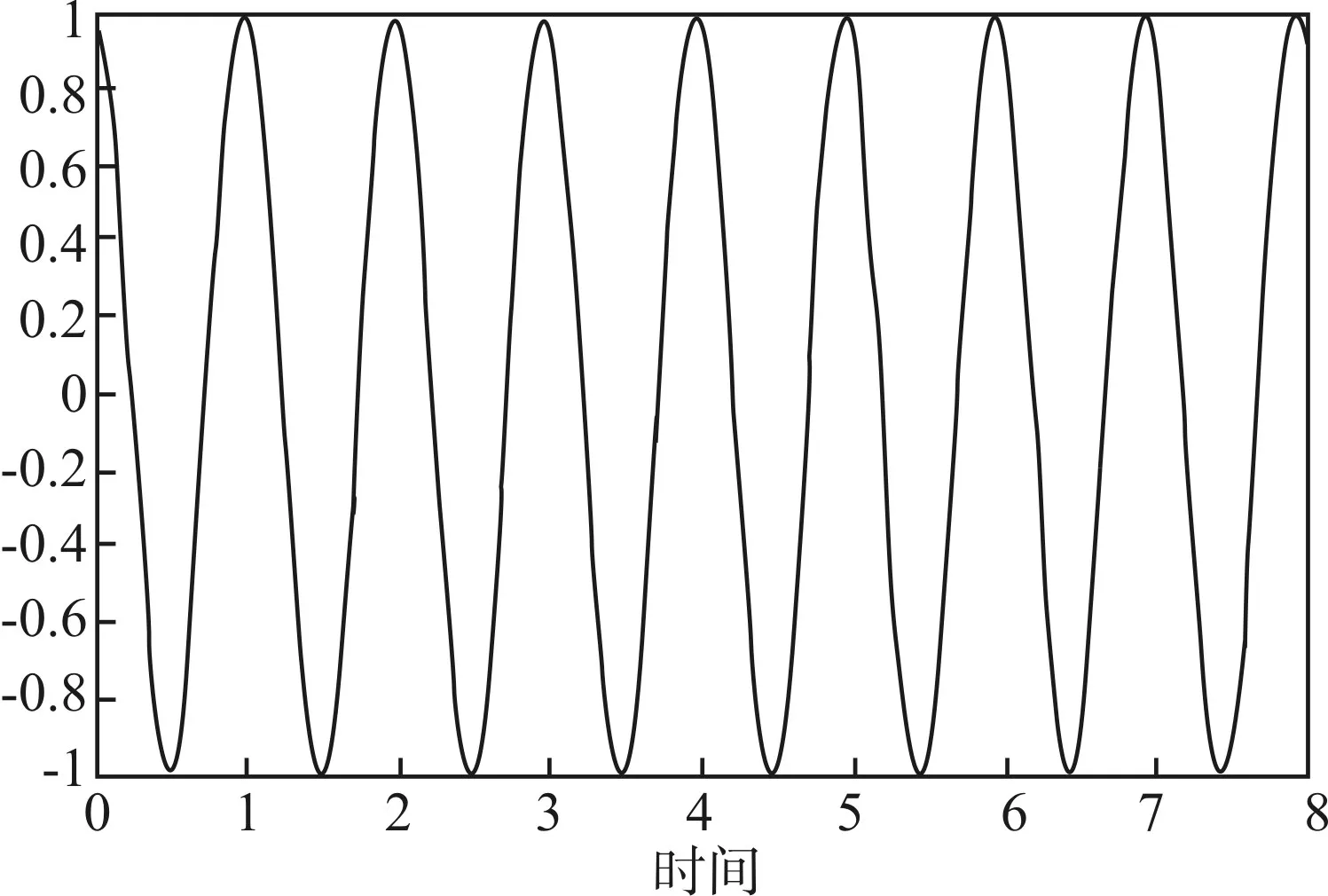
图9 Matlab仿真波形图
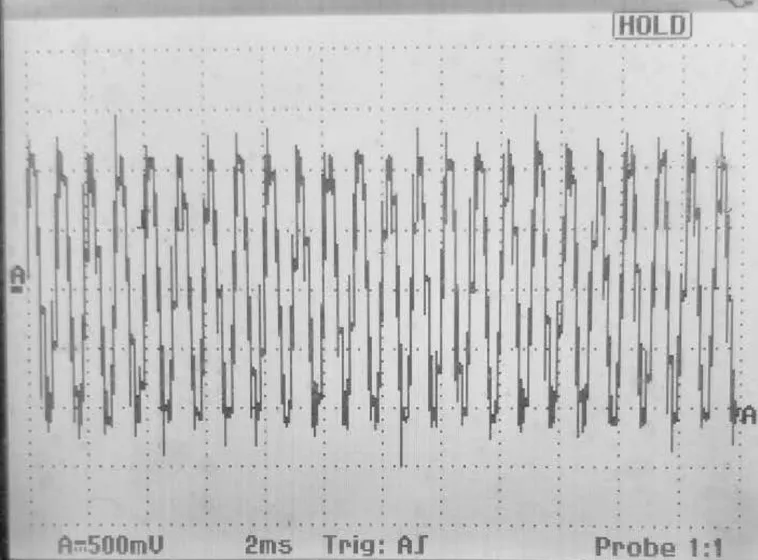
图10 MSK信号波形图
6 结语
本文通过分析了传输数据与连续相位码元波形之间的对应关系,采用了一种基于调用码元波形样值数据的MSK信号的数字化调制方法,搭建MSK调制硬件仿真平台,测试结果表明该方案降低了MSK调制器程序的复杂度,实现了小型全数字化MSK调制器。
[1]郑松惠.一种新的数字调制方法-最小频移键控(MSK)[J].大众科技,2004(4):70-73.
[2]陆智超.全数字MSK调制解调器的设计与实现[J].哈尔滨:哈尔滨工程大学,2010:5-10.
[3] James S.Lehnert.Serial MSK Spread-Spectrum Multiple-Access Communications[M].IEEE Transaction on Communication,1990(6).
[4]樊昌信,曹丽娜.通信原理教程[M].第6版.北京:国防工业出版社,2013:241-247.
[5]胡敏.MSK数字化调制解调技术研究[D].长沙:中南大学,2007.38.
[6]王立宁,乐光新.MATLAB与通信仿真[M].北京:人民邮电出版社,2000:97-103.
[7]郑建霞.对具有连续相位的几种调制方式进行相频特性分析[J].惠州学院学报(自然科学版).2002(22):40-47.
[8]张国华,邵定蓉,冯石南.声表面波最小频移键控滤波器及其调制系统[J].导航,1966(2):100-107.
[9]赵林海,徐迅,邱宽民.数字轨迹电路MSK信号的一种纠错解调方法[J].北方交通大学学报.2000.24(5):49-53.
[10]卢盛杰,曲杰琳.实现MSK调制的方法与电路[J].黑龙江通信技术.1997(1):11-18.
[11]刘刚,江洪敏,江波.位置报告系统用声表面波可程序MSK 调制解调组件[J].压电与声光,2002,24(3):92-95.
[12]谢红.模拟电子技术基础[M].哈尔滨:哈尔滨工程大学出版社).2002:1-3.
[13]潘申富,王赛宇.基于NCO的MSK数字调制[J].无线电通信技术,2002(22):40-47.
Design and Im p lementation of DigitalMSK Modulator Based on SCM
HUO Junjun WANG Yongbin LIU Hua LIU Tong
(College of Electronic Engineering,NavalUniversity of Engineering,Wuhan 430033)
According to the characteristic ofMSKmodulation,a MSKmodulationmethod based on the data of the calling code waveform digitalmodulation is designed after analyzing the relationship between data transmission and continuous phase codewaveform,Matlabmodeling and simulation are used to thismodulationmethod.Then hardware platform is built to verify its feasibility using the ARMCortex-M7microcontroller,the expansion of the SDRAMchip and DAC902 chip digitalMSKmodulation chip,the experimental results show that thismethod reduces the complexity ofMSKmodulator,which is to say thismethod can achieve all digitalMSKmodulation andminiaturization.
MSKmodulation,microcontroller,phase continuity,miniaturization
TP311
10.3969/j.issn.1672-9730.2017.09.033
2017年3月11日,
2017年4月30日
霍君君,女,研究方向:无线通信。王永斌,男,教授,研究方向:无线通信。刘华,男,硕士研究生,研究方向:无线通信。刘桐,男,硕士研究生,研究方向:无线通信。
