无人机APM—PIXHAWK飞控应用研究
2017-10-21张祖航曹著明薛翼飞
张祖航+++曹著明+++薛翼飞
摘 要:对于复杂的无人机结构和原理,四旋翼无人机具有成本低、结构简单、使用方便等优势,同时也是最先进入民品市场的机型。可是,该无人机对飞行控制操作能力要求很高,由此激发了大量科研人士对基于MEMS传感器的开源飞控的研制。由于无人机飞控的发展,有效提升了多旋翼无人机、固定翼无人机、车模和直升机等设备的性能,使其具备多种运行模式,其功能已接近商业自动驾驶仪标准。本文通过研究APM-PIXHAWK开源飞控的性能以及原理和相应的飞控调试中的出现问题,提出相关提升其性能的策略,以实现开源飞控在商业市场上的高性能及飞行器的飞行稳定性,更好地为无人机行业做出贡献。
关键词:无人机 飞控 开源 APM 研究
从无人机的硬件设施来分析,飞控系统主要包括传感器、飞控计算机及伺服装置三部分。整个无人机机载飞控系统的核心设备是飞控计算机,其主要功能是依据输入的相关信息(传感器等)、储存的相关数据和状态以及传输的数据与上行遥控指令(无线电测控终端),再完成分析、计算和处理,然后输出给伺服运行机构即舵机系统,来操纵控制无人机的舵面、前轮和发动机的风门,以实现对无人机的飞行或地面滑跑的控制。无人机相关的状态信息主要由测定装置负责测量,无人机的主要测量装置有:陀螺仪(三轴角速度、垂直),传感器(攻角和偏航角、真实空速、磁航向、气压高度和高度差、发动机转速)等。以舵机为执行元件的是伺服系统,其随动系统由若干部件组成,它将主要影响飞控系统带宽。伺服系统是按照指令模型装置或敏感元件输出的电信号来操纵舵面,以实现无人机的自动稳定和控制。在该伺服系统中常用的三种反馈是均衡反馈、位置反馈和速度反馈。同时它们构成三种常见的舵回路形式,即硬反馈式、弹性反馈和软反馈式。
一、PIXHAWK飞控
ArduPilot Mega自动驾驶仪(简称APM自驾仪-APM V)是一款非常优秀而且完全开源的自动驾驶控制器,可应用于多旋翼、固定翼、车模、直升机等,同时还可以搭配多款功能强大的地面控制站配合使用。地面控制站可以在线升级固件、调参,并使用一套全双工的无线数据传输系统在自驾仪与地面站之间建立起一条数据链,即可组装成一整套无人机自动控制系统,适合个人组建自己的无人机驾驶系统。
PIXHAWK作為飞行控制器,是世界上最出名的开源飞控的硬件厂商3DR最新推出了最新一代飞控系统,其前身是开源飞控APM,由于APM的处理器已经接近满负荷,不能够满足更复杂的运算处理,因此硬件厂商采用了目前最新标准的32位ARM处理器,第一代产品是PX4系列,他分为飞控处理器 PX4FMU和输入输出接口板PX4IO。PX4系列可以单独使用PX4FMU,但是接线的方式还是较为复杂,不过也可以配合输入输出接口板PX4IO来使用调试,因为没有统一的外壳,再加上使用复杂,为了避免不好固定,此版本还是处于试验测试阶段。通过测试PX4系列的不足,厂商最终找到了优化方案,简化了结构,把PX4FMU和PX4IO 整合到一块电路板上,加上了骨头状的外壳,保护了里面的电路控制系统,并改进了硬件和走线设施,使其性能更加良好。也就是目前市场上的这款第二代产品PIXHAWK;PIXHAWK的所有硬件都是透明的,它用的是什么芯片和传感器一目了然,所有的总线和外设都进行引出,不但可以兼容一些其他外设,并且为有开发能力的用户提供了方便。PIXHAWK是一个双处理器的飞行控制器,一个擅长于强大运算的32bit STM32F427 CortexM4核心与168MHz/256KB、RAM/2MB Flash处理器,还有一个主要定位于工业用途的协处理器32bit STM32F103,它的特点就是安全稳定。所以就算主处理器死机了,还有一个协处理器来保障安全。
1.性能特点
APM-PIXHAWK的特点是:免费的开源程序,支持多种载机。ArduPlane模式支持固定翼飞机,Arducoper模式支持直升机与多旋翼(包括三轴、四轴、六轴、八轴等),ArduRover模式支持地面车辆;人性化的图形地面站控制软件,通过一根Micro_USB线或者一套无线数传连接,鼠标点击操作就可以进行设置和下载程序到控制板的MCU中,无需编程知识和下载线等其他硬件设备。但如果想更深入的了解 APM 的代码的话,仍旧可以使用Arduino来手动编程下载;地面站的任务规划器支持上百个三维航点的自主飞行设置,并且只需要通过鼠标在地图上点击操作就行;基于强大的MavLink协议,支持双向遥测和实时传输命令;多种免费地面站可选,包括 Mission Planner,HK GCS等,还可以使用手机上的地面站软件,地面站中可实现任务规划,空中参数调整,视频显示,语音合成和查看飞行记录等;可实现自动起飞,自动降落,航点航线飞行,自动返航等多种自驾仪性能完整支持Xplane和 Flight Gear 半硬件仿真。
2. PIX飞控面板
PIX飞控面板一共有15个端口,包括SpektrumDSM2 或DSMX卫星接收机接口;TTL串口数据,数传电台(丝印字符TELEM1);(丝印字符TELEM2)TTL 串口数据,常用于连接OSD;外接USB连接口,用于延长 USB接口到外面;SPI总线;电源模块接口;7安全开关接口;蜂鸣器接口;TTL串口4和5;GPS模块接口;CAN总线接口;I2C总线接口;ADC输入最高6.6V;ADC 输入最高3.3V;LED信号灯。每个端口都有相应的作用。更好地适合于在无人机上面加更多的功能以及显示飞机当前飞行状态。它的技术规格、接口分配、PWM、PPM-SUM和SBUS模式下的舵机与电调的连接。
PIX飞控的侧面部分主要的功能为:让飞控恢复出厂设置和连接电脑软件的USB端口进行调试。飞控调试以及TF卡槽和复位键,都是重要组成部分,之所以笔者在调试的过程中都要找到相应的位置正确操作,避免出现不必要的危险。PIX侧面面板有四个接口,其作用分别是:输入输出模块复位按钮;TF卡插槽;飞行控制模块复位按钮;Micro-USB接口。endprint
PIX飞控指示灯是让我们得知飞控是非处于打开和关闭状态,一共有三种颜色,分别为红、黄、蓝。以及相对应的指示作用。重要的是还可以得知飞控上的GPS是否搜索到卫星信号,飞机罗盘是否校准。POWER为电源指示灯;TX为板载Atmega32U与2560的通讯数据指示灯,发射;RX为板载Atmega32U与2560的通讯数据指示灯,接收;A红为解锁灯,闪动为未解锁,常亮为解锁,可以起飞;C蓝为GPS指示灯,闪烁表示未完成定位,常亮是表示完成定位;AC为A和C常亮后就可以起飞了。
PIX的通道接口主要有四个,分别为:遥控器输入 PPM格式,最多支持8个通道,大多数用户需要PWM转 PPM 模块;S.Bus输出;主输出,8个PWM通道,用于连接电调或者舵机;辅助输出,6个PWM通道,用于其他扩展,例如舵机云台。该部分为飞控的下半部分,其他的主要作用为飞控的供电端和电调输入端以及接收机输入端。最左端是两个接收机的两个连接方式,分别为SBUS、和PWM解码器的转换口。中间和右边为通道输出端。
3.飞控罗盘校准
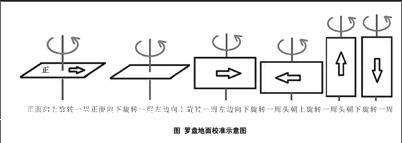
罗盘校准的页面跟面板上的加速度校准在同一个菜单栏下,然后点击工nstall setup(初始设置)下的MandatoryHardware下拉菜单,选择Compass菜单,按下图勾选对应的设置以后点击Live Calibrad(现场校准)。为了更好地让无人机在空中稳定的飞行,罗盘校准是笔者在装调飞机一个必不可少的一个重要步骤,校准的手动操作为:请在60秒内转动PIX飞控,每个轴至少转一次,即俯仰360度一次,横滚360度一次,水平原地自转360度一次,如果上而加速度校准的那个方盒子还没拆除,那么就是每个而对着地而放一次,每个而自转360度一次;如果是外置罗盘,请转动外置罗盘。罗盘校准如图1所示。
二、PIXHAWK调试关键技术
在笔者调试软件的过程中难免会出现有的地方会出错,在面板中就会显示相应的错误报警。例如为什么会出现Bad Compass Health,GPS是有信号的,但是罗盘出问题了,那么出现这种情况有一下几个可能,以及相应的解决措施。电压供电不足,那么这个时候就需要拿万用表检查电压供电情况;看罗盘是否校准,如果没有校准的话就得重新进行校准;如果校准,那用的外置罗盘还是内置罗盘;如果用的是外置罗盘的话就需要把跳线拔掉,跳线在主板上;接线问题,看是否有将线接错或者接反,一定要注意电源线,如果将其与地线接反的话就会被烧掉,导致罗盘不能使用;还要看是否有接触不良现象,这也会导致罗盘不能使用。
为了在调试过程中更好地去开发此飞控和调试的软件功能,笔者要去更精确的调试,有时会出现GPS 定位精度的问题。出现上面的问题的时候教师最好是重新校准一下,或者更换固件版本,最好是将所有的都校准,然后建議清除EPROMM。
三、常用飞行模式
此开源飞控具有10种飞行模式,主要是为了适应于飞机所运用的某一行业开发的。每个模式都有相应的功能,笔者在调试过程中根据所需要的模式再去制定。以下称相应的模式。
1.稳定模式(Stabilize)
目前使用最多的、最基本的飞行模式是稳定模式,主要应用于起飞和降落。此模式一般是初学者进行飞行的首选,因其飞控会让飞行器保持稳定,并且也是FPV第一视角飞行的最佳模式。应急时一定要确保遥控器上的开关误地拨到该模式。
2.定高模式(ALT_HOLD)
该模式将采用自动油门,要保持目前的高度飞行。即使在定高模式下,提高或降低油门还是可以控制飞行高度的,但需要注意在操作过程中会产生一个油门“死区”,油门动作幅度超过这个死区时,无人机才会达到相应的升降高度,并以当前高度为基准,油门将被用来作为基准(调整油门保持高度)。确保无人机在悬停在一个稳定的高度(在进入高度保持前)。随着飞行时间增加,不良飞行器参数将得到补偿,飞机就基本处于稳定状态。因此飞行器迅速下降或上升产生的主要原因是飞行器的中性悬停位置,将会导致。
3.悬停模式(Loiter)
悬停模式是气压定高模式加GPS定点的组合。在起飞前应先让GPS定点,搜索到卫星,防止发生空中定位突然出现问题。
4.简单模式(Simple Mode)
该模式相当于一个“无头模式”,每个“飞行模式”的周围都有一个“Simple Mode”复选框可供选择。当选择“简单模式”时,飞行器将解锁起飞前的机头指向,同时遥控器前行摇杆的指向将由起飞前的机头指向恒定决定。
5.返航模式(RTL)
无人机返航时需要“GPS”定位。“GPS”在每次解锁前的定位点,就是无人机返航到的目的地的位置;一旦飞行器进入返航模式后,飞机将自动升高到15米,然后保持在当前高度,然后自动飞回“最初”起飞位置,同时也可以设置高级参数来确定返航点,进而确定是是否自主降落,或者悬停多少秒之后再自动降落。
6.绕圈模式(Circle)
当选择“绕圈模式”时,飞机将以当前位置为圆心进行绕圈飞行。飞行时飞机的将机头始终朝向“圆心”,同时该模式下的机头将不受遥控器方向舵的控制和影响。当操纵遥控器,发出俯仰和横滚指令时,飞行模式的圆心会被改变。此时需要调整油门来调整无人机的飞行高度,但降落是不允许的。可以通过改变圆的半径参数设置来调整。
四、小结
本文介绍了基于无人机飞控APM-PIXHAWK飞控系统基本原理和飞控面板的介绍,飞控的性能特点,以及飞控调试的过程中的罗盘校准,飞行模式的注解,PIXHAWK的疑难杂症解决方案,通过系统的详细介绍,从而大大提高了开源飞控在商业市场上的应用性能,多功能的开发此类飞控,让无人机在各个领域的用用价值。同时通过罗盘的校准介绍,可以让无人机在飞行过程的姿态更加稳定,更适合的去完成相关作业。飞控的飞行模式设置中要适当去选择该飞机所运用的那种类型比如“航拍”选择、悬停模式Loiter、稳定模式Stabilize、8绕圈模式Circle。在无人机组装调试中引进开源飞控,不但提高了飞机的稳定性能,而且还提高了无人机的多元化硬件的开发应用,具有广泛的应用价值。目前高效性、稳定性、高效性的飞控研究开发,解决了目前无人机在飞控行业的更好地把开源飞控运用到市场上。
参考文献:
[1]王泉.无人机飞控软件测试方法研究[J].航空计算技术,2008(38).
[2]龙燕.高静稳定性无人机飞行控制系统研究[D].成都:四川大学,2003.
[3]李硕,李小民.电子罗盘在无人机在飞控器中的应用[J].武器装备自动化,2007(12).
[4]马飒飒.无人机飞控软件测试技术研究[J].无线电工程,2004 (10).
[5]赵毅强,管大年,陈豪敏.电子罗盘在精确定位平台中的应用[J].传感器技术学报.2015(01).
[6]彭树生. 数字电子罗盘HMR3000的特性及应用电子技术[J].2004 (8) .
[7]刘林等.飞行控制系统的分系统[M].北京:国防工业出版社,2003.
[8]陈再新等.空气动力学[M].北京:航空工业出版社,1993.
(作者单位:北京电子科技职业学院)endprint
