移动机器人复合电源系统的能量管理研究
2017-10-17董鹏飞吴立锋王国辉王洪民
董鹏飞,吴立锋,王国辉,潘 巍,王洪民
(首都师范大学信息工程学院,北京100048)
移动机器人复合电源系统的能量管理研究
董鹏飞,吴立锋,王国辉,潘 巍,王洪民
(首都师范大学信息工程学院,北京100048)
针对移动机器人蓄电池-超级电容复合电源系统提出了基于模糊逻辑的能量管理控制策略,该策略充分地利用了蓄电池的高比能量和超级电容的高比功率的特性,使超级电容承担瞬时大功率,蓄电池承担长时间的平均功率。通过建立复合电源系统的模型进行仿真研究,仿真结果表明该策略有效地提高了机器人的动力性能,以及延长了蓄电池的使用寿命。
机器人;复合电源;模糊控制;能量管理
Abstract:An energy management strategy based on fuzzy logic of a battery and ultra-capacitor composite power systems for mobile robots was presented.The fuzzy control approach was proposed to exploit the high energy density of batteries and the high power density of ultra-capacitors.With the strategy,instantaneous large power could be provided by ultra-capacitors,while smooth power could be provided by batteries for long time.A model of composite power systems was established for simulation study.The simulation result shows that our strategy can effectively improve the performance of mobile robots and extend the lifetime of batteries.
Key words:mobile robots;composite power system;fuzzy control;energy management
现代社会中,机器人的应用越来越广泛,例如在现代工业、国防、航空航天等领域起着越来越重要的作用,因此吸引了各国学者对机器人技术进行深入的研究。但目前国内外的研究大多集中在机器人的机构设计与行为控制方面,如机器智能、导航定位、路径规划等[1-2]。而机器人的一切行为基础却是电源供电问题,针对此方面的研究却很少[3]。事实上,随着机器人的结构越来越复杂,其电源匹配与动力驱动问题已成为限制机器人技术发展的一个重要瓶颈。
目前普遍用的蓄电池具有体积质量大、比功率低、充电时间长、使用寿命短等缺点。而超级电容器与常用的蓄电池相比,具有比功率高、充放电速度快、效率高、循环寿命长等优点,但其比能量低,一般不单独作为供电装置来使用[4]。因此将蓄电池与超级电容组成复合电源,兼顾到了蓄电池的高比能量与超级电容的高比功率特性,但必须辅以有效的能量管理策略才能发挥复合电源的优势。因此,本文提出了一种基于模糊控制逻辑的能量管理策略,并建立了复合电源系统模型进行仿真研究。
1 机器人复合电源结构
蓄电池、超级电容与双向DC/DC变换器组成了机器人的复合电源系统,其拓扑结构图[5]如图1所示。蓄电池为主电源,超级电容器作为辅助电源。将蓄电池与直流总线直接相连,超级电容器通过一个双向DC/DC变换器与直流总线相连。这种结构形式下蓄电池直接对外输出功率,能量转换效率高,超级电容通过双向DC/DC变换器跟踪监测蓄电池端电压,并调节自身电压与蓄电池匹配工作,进而保护蓄电池。
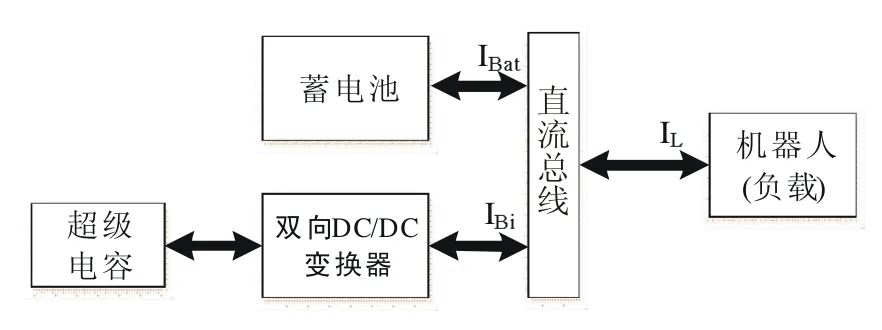
图1 复合电源结构图
根据基尔霍夫电流定律,有

式中:IBat为蓄电池输出电流;IBi为超级电容经双向DC/DC变换器的输出电流;IL为机器人的工作电流。本文规定,IL>0时,双向DC/DC变换器处于正向工作状态,复合电源处于放电工作状态。
由式(1)可知,对于一定的电流IL,通过控制双向DC/DC变换器的输出电流IBi可以达到间接控制蓄电池输出电流IBat的目的。在负载电流突变时,通过双向变换器对超级电容进行快速地充、放电,使IBi迅速地跟踪IL的变化部分,蓄电池就仅仅输出负载电流的平稳部分。
荷电状态SOC表征了储能装置的剩余容量。对于蓄电池与超级电容来说,为了延长其使用寿命,两者的SOC要尽量工作在规定的范围内,故应满足式(2)、式(3)的要求

如果SOC太高,就不能尽可能多地回收制动能量,而导致这部分能量浪费掉;如果SOC太低,可能无法提供机器人工作时的功率需求,从而影响机器人的工作性能。实际工作中,蓄电池和超级电容的SOC安全范围一般分别为[0.5,0.8]和[0.2,0.9][6]。
2 基于模糊逻辑的能量管理策略设计
复合电源应给机器人提供足够的能量供应,同时也应尽可能延长机器人的工作时间,即延长复合电源的持续工作时间。针对此特点,能量管理策略应具有以下功能:当负载电流IL过大时,控制超级电容适度分担峰值电流,把蓄电池电流IBat限制在合理范围内;当回馈能量时,尽量使用超级电容回收能量,超级电容回收速度快,效率高,如果超级电容SOCUC过大,就由蓄电池回收;同时须控制超级电容的SOCUC保持在适当范围内,使其一直具有最佳的充放电能力。
2.1 能量管理系统结构
图2为复合电源能量管理控制原理框图。系统中能量管理控制器控制着复合电源系统的工作,控制器根据实时采集到的蓄电池SOCBat、超级电容SOCUC以及负载电流IL的信号来实时控制双向DC/DC变换器的工作,以实时调节超级电容的功率输出,间接地调整蓄电池的功率输出,达到优化复合电源工作的目的。

图2 能量管理控制原理框图
能量管理控制器采用基于模糊逻辑的能量管理控制策略,因为模糊控制法具有推理能力强、鲁棒性好等优点。复合电源具有放电(即给机器人供电)和充电(即回收制动能量)两种工作状态,两种工作状态下的负载电流的大小与波动范围有较大差别,控制的侧重点也不同,因此需针对两种工作状态分别设计模糊控制策略。
两种工作状态下,模糊控制器均采用三输入、单输出的mamdani结构,三输入分别是系统的负载电流IL、蓄电池SOCBat和超级电容SOCUC,输出为PWM的控制信号K。模糊控制器的三个输入量的变化范围都是可预先测定的,为方便设计,对模糊控制器的输入输出量进行归一化处理。
2.2 放电工作状态
复合电源处于对外放电工作状态时,当负载电流IL较小时,为了避免电流经过DC/DC变换器时的功率损耗,应全部由蓄电池提供;负载电流IL很大时,为了避免蓄电池过电流放电,应根据超级电容SOCUC的高低确定由其提供峰值电流的大小,余下的基本电流由蓄电池提供。
根据复合电源的放电控制策略,定义模糊控制器的各输入输出的论域分别为IL:VS(很小)、S(小)、M(中)、B(大)、VB(很大),SOCBat:L(低)、M(中)、H(高),SOCUC:L(低)、M(中)、H(高),以及K:VS(很小)、S(小)、M(中)、B(大)、VB(很大)。各输入输出量的隶属度函数如图3所示,相应的模糊规则如表1所示。其中,电流IL(A),蓄电池的荷电状态SOCBat(%),超级电容的荷电状态SOCUC(%),PWM的控制信号K。

图3 放电时各输入输出量的隶属度函数
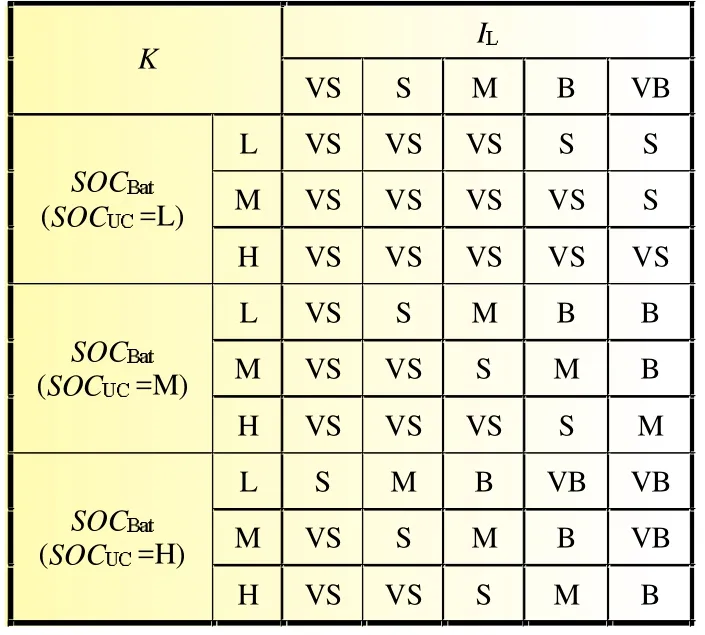
表1 IL>0时,模糊控制规则表
2.3 充电工作状态
复合电源处于充电工作状态,即回收制动能量,负载回馈电流IL较小时,考虑蓄电池充放电循环寿命的限制,在保证超级电容的SOCUC不过高的前提下,优先考虑对超级电容充电;负载回馈电流IL较大时,若超级电容的SOCUC高,则对其少充电或不充电,SOCUC低则多充电。其中,电流IL(A),蓄电池的荷电状态SOCBat(%),超级电容的荷电状态SOCUC(%),PWM的控制信号K。
由于回馈电流不会持续很长时间,且考虑到回收速度及效率,因此对输入输出的模糊论域重新划分。定义模糊控制器的各输入输出的模糊论域分别为IL:S(小)、M(中)、B(大);SOCBat:L(低)、M(中)、H(高);SOCUC:L(低)、M(中)、H(高)、VH(很高)及K:S(小)、M(中)、B(大)。各输入输出量的隶属度函数如图4 所示,相应的模糊规则如表2所示。
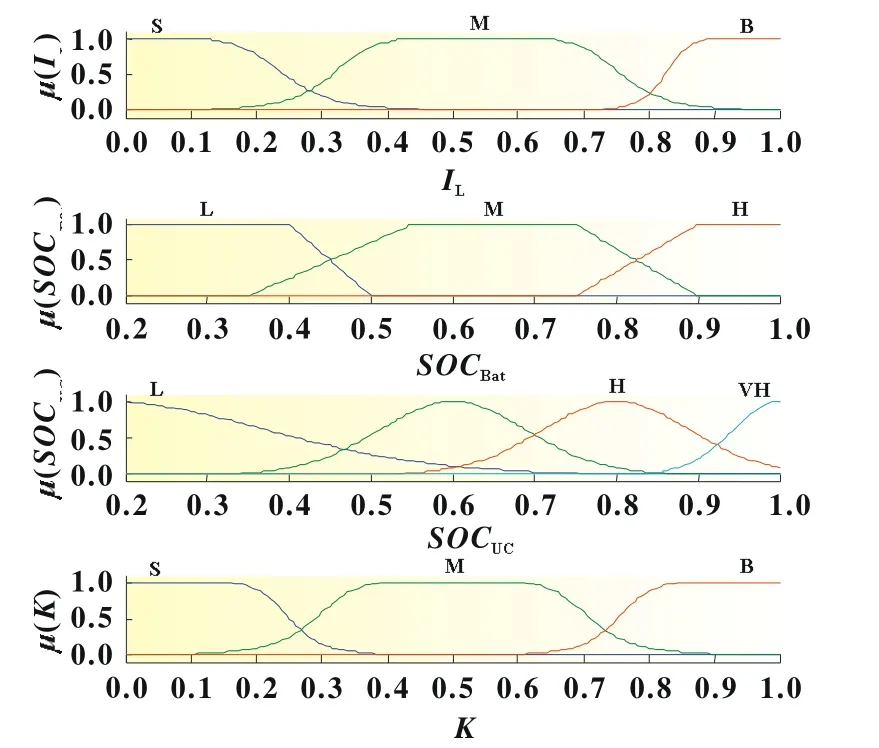
图4 充电时各输入输出量的隶属度函数
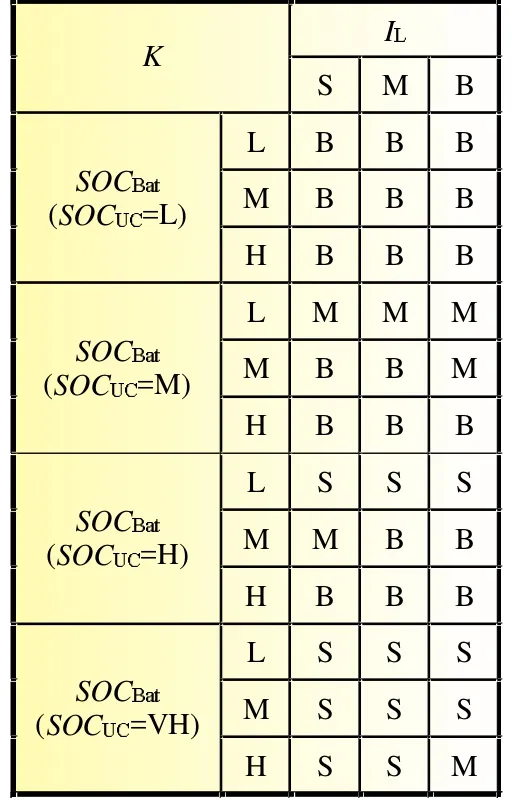
表2 IL<0时,模糊控制规则表
3 仿真实验与分析
在MATLAB R2011b环境下建立移动机器人复合电源系统仿真模型。蓄电池直接采用Lithium-Ion电池模型,额定电压14.4 V,容量1 Ah,内阻0.144 Ω,初始荷电状态是0.9;超级电容采用电容和电阻的串联模型,电容为10 F,初始电压为12 V,用受控电流源作为机器人的负载模型。仿真结果如图5所示,从图5中可见,移动机器人的启动、减速、加速、回馈制动等典型工作过程都集中在30 s时间内,图5中给出了负载电流IL、蓄电池电流IBat和超级电容IBi的变化曲线。
由图5可知,机器人在启动时的瞬时大电流由超级电容迅速提供,蓄电池输出电流缓慢升高,有效地缓解了蓄电池大电流放电,保护了蓄电池。机器人小电流工作时,基本由蓄电池来提供能量,避免了超级电容经功率变换器时的功率损失。在机器人回馈制动能量时,为了避免循环充放电对蓄电池寿命的不利影响,主要由超级电容回收。超级电容在复合电源起到了削峰填谷的作用,能够满足机器人瞬间大功率需求,同时又能快速回收制动能量,延长复合电源的工作时间。
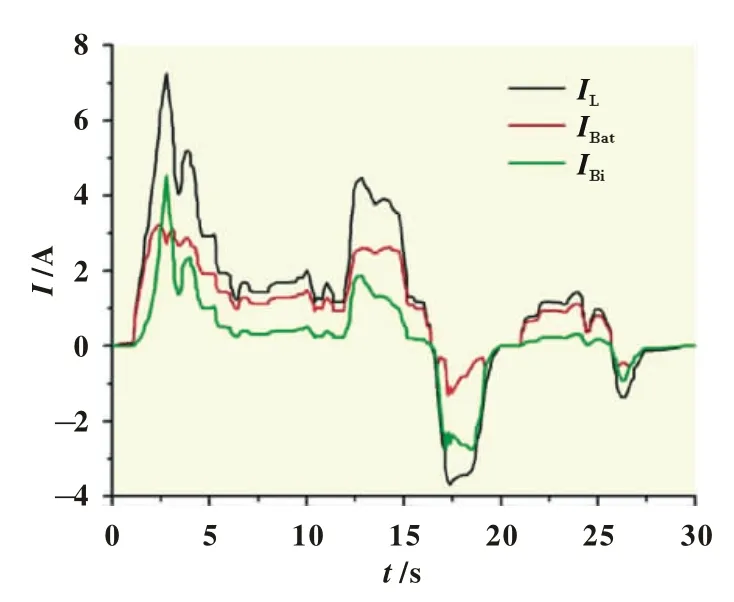
图5 仿真模型电流曲线
4 结论
针对机器人蓄电池-超级电容复合电源系统提出了基于模糊逻辑的能量管理控制策略,并通过建立复合电源系统的模型进行仿真研究。仿真实验结果表明,在保证机器人动力性能的基础上,超级电容器对蓄电池电流起到了良好的补充,可延长蓄电池的使用寿命,并可利用超级电容快速回收制动能量提高机器人的持续工作能力。
[1]谭民,王硕.机器人技术研究进展[J].自动化学报,2013,39(7):963-972.
[2]吕应明,袁海文.移动机器人用的蓄电池-超级电容器复合电源的动力性能研究[J].电力电子,2012,2:14-18.
[3]RAADE J W,KAZEROONI H.Analysis and design of a novel hydraulic power source for mobile robots[J].IEEE Transactions on Automation Science and Engineering,2005,2(3):226-232.
[4]闫晓金,潘艳,宁武,等.超级电容-蓄电池复合电源结构选型与设计[J].电力电子技术,2010,44(5):75-77.
[5]WANG G H,DAI Z Q,GUAN Y,et al.Power management of hybrid power systems with Li-Fe batteries and supercapacitors for mobile robots[J].Advances in Mechanical Engineering,2014(8):1-11.
[6]石庆升,张承慧,崔纳新.新型双能量源纯电动汽车能量管理问题的优化控制[J].电工技术学报,2008,23(8):137-142.
Energy management of composite power systems for mobile robots
DONG Peng-fei,WU Li-feng,WANG Guo-hui,PAN Wei,WANG Hong-ming
(College of Information Engineering,Capital Normal University,Beijing 100048,China)
TM 912
A
1002-087X(2017)09-1361-03
2017-02-15
国家自然科学基金资助项目(61070049;61202027);国际科技合作项目资助(2012DFA11340);北京市自然科学基金资助项目(4122015)
董鹏飞(1989—),男,安徽省人,硕士生,主要研究方向为电源系统故障预测与健康管理。
吴立锋