一种面向遥感影像自动提取结果的线要素自适应平滑方法
2017-10-16赵东旭
赵东旭, 武 昊,遆 鹏
(1.西南交通大学 地球科学与环境工程学院,四川 成都 611756;2.国家基础地理信息中心,北京 100830)
0 引 言
遥感技术为地理国情监测和资源动态评估等应用领域提供了重要保障[1-3]。与此同时,这些应用领域也对地理信息产品的精度、更新频率等提出了新的需求。如环境监测领域的工作任务之一是对违法工矿企业的动态监测,其对地物要素的位置精度要求较低,但对监测成果的更新频率要求极高。然而,传统地理信息产品(如4D产品)的生产模型主要采用单机环境下的人工编辑模式对专业软件自动提取的结果进行优化,虽然能够保障数据的精度与质量,但生产效率较低,具体表现为操作流程复杂、作业员交互困难等缺陷,难以满足快速更新的要求。因此,发展一种面向专题应用的在线数据生产模式[4-5],是解决当前应用需求的重要趋势。其中,如何针对自动提取结果进行数据优化,是需要解决的关键问题之一。由于遥感影像自动提取结果多为栅格数据,在要素边缘呈现为“不规则锯齿状”,严重影响着数据质量和可视化效果,在生成矢量要素时,需要对结果进行平滑,以满足应用要求。鉴于点状要素不存在数据平滑的需求,而面要素在矢量数据中可以用轮廓线来代表。因此,可以以线状要素为研究对象研究面向遥感影像自动提取结果的平滑方法。
多年来,线要素的自动平滑方法一直被中外许多学者所关注[6-12]。其基本思路分为两种[11]:一是根据节点坐标直接对线要素进行拟合,但由于不同拟合方法的拟合效果差别较大,且难以和实际要素完全贴合,所以对本文所研究的内容并不适用;二是通过对线要素上节点数目的删减或位置的调整来达到平滑目的。其中,第二种思路又可根据平滑阈值是否固定进一步分为两类:一是固定阈值的平滑方法,如Douglas提出的Split方法[13],该方法首先在线要素的两个端点虚连一条直线,并计算所有剩余节点与该直线的距离中的最大值,若该值小于预设的阈值,则平滑结束,反之则以该值所对应的节点将曲线分为两段,并分别不断重复这一过程直至平滑结束。但这种方法难以一次性合理确定阈值,需要根据使用不同阈值所得到的结果进行多次尝试;二是可变阈值的平滑方法,如周焰、王祖喜等提出的基于弧长参数的曲线平滑方法[14],该方法通过基于Freeman链码的描述方法来刻画某一段曲线的噪声程度,进而根据噪声程度确定阈值,实现了对不同噪声使用不同阈值的自适应平滑。但该方法需要将曲线先分为若干个噪声相对均匀的部分,在对较长的线要素进行处理时并不适用。综上,固定阈值方法中阈值的设定主要依靠经验且需要多次尝试,对于噪声程度不均匀的线要素,阈值过大或过小都难以取得理想的平滑效果,多用于处理噪声程度分布均匀的情况,但自动提取结果数据噪声分布不均匀,此类方法难以适用;可变方法中通过使用一定的方法对线要素的局部特征进行描述,并以此确定阈值进而达到自适应平滑的目的。但这类方法通常需要对线要素上所有节点进行遍历以区分节点的重要程度,在处理节点数目较多的线要素时计算量多大且效率低下,不适用于在线数据生产的应用。
针对这些问题,本文研究了线要素自动提取的基本原理,分析其自动提取结果中噪声的来源和特点,提出了一种无需预先设置阈值、具有自适应能力的线要素平滑方法,并使用自动提取结果数据验证了该方法的适用性和有效性。
1 自动提取结果的噪声分析
地物要素的自动提取是根据其影像特征,选取遥感影像中符合要求的像元,并最终得到不同地物类型的过程[15]。在这一过程中,由于遥感影像包含地物信息种类较多,且影像容易受到云层等因素的干扰,不可避免的产生噪声,而噪声的特点也和提取地物的类型、提取方式等相关。
线要素的影像特征主要表现为背景灰度相对均一、形状为相互平行的双边缘等。根据这些主要特征,设定形状和大小固定的识别样本对影像的所有像元进行筛选,得到一系列符合其影像特征的连续的、具有一定重叠范围的样本如图1a所示,并根据样本进而生成矢量如图1b所示,即可得到最终的线要素自动提取结果。但由于线要素的形态特征复杂,导致所提取到的样本和实际的地物形态难以完全贴合,在生成矢量的过程中出现了不同程度的噪声。

图1 道路自动提取的样本识别和矢量结果(参考文献[16])Fig.1 The sample recognition and vector results of path automatic extraction
自动提取结果中噪声的主要特点主要表现为以下3点:
1) 位置分布:受线要素提取目标背景复杂程度等因素影响,噪声可能出现在线要素的任意位置;
2) 波动范围:为了保证线要素提取结果的连续性,通常要求提取的样本具有一定的重叠区域,因此噪声的最大值不超过样本宽度的大小;
3) 均匀程度:呈现不均匀性,噪声部分的剧烈程度不一。
2 基于三角内心的自适应平滑方法
噪声的本质是自动提取结果矢量中节点偏离实际线要素而造成的角度偏差和距离偏差。因此,可以通过节点间的相对位置关系来反映噪声的剧烈程度。
对于线要素自动提取矢量结果中的大量节点,相邻的3个节点中每个节点和实际线要素最接近的概率相同。所以,对于每3个相邻节点组成的三角形,到三条边距离相等的点(即三角形内心点)也是最接近实际线要素的点。如果以这一内心点作为每3个相邻节点的平滑结果,则当3个相邻节点位于同一直线上即没有噪声时,得到平滑后的点仍在原来的线方向上,不会影响原有的线要素形态;对于3个点偏离的角度和距离较大即噪声较大的情况,则得到的平滑后的点为对应三角形的内心,可以最大限度地使新的节点接近实际的线要素。于是,可以据此得到一种自适应平滑的思路:保持每段线要素的起点和终点不变,依次对每3个节点组成的三角形取其内心点,可以实现对线要素实现自适应的平滑。图2为对不同程度噪声道路要素使用上述思路平滑的模拟结果,可以看到,噪声较小的左半部分得到节点位置的调整力度较小,而噪声较大的有一半部分则得到了较大力度的处理,整体上,平滑结果(绿色实线)明显比原自动提取结果(蓝色实线)更加平滑,证明该思路具有可行性。
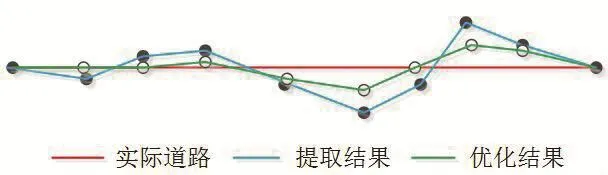
图2 基于三角内心算法的模拟结果Fig.2 The simulation results based on trigonometric inner algorithm
基于上述思路,对算法进行了进一步的研究,其基本过程如下。
首先,读取线要素矢量中的所有节点,其中,以两个直接相邻交点之间的线要素部分作为基本单元,以下称之为“线段”。设一个线要素网络中所有的线段集合为{D1,D2,…,Di,…,Dn},其中一个线段的节点集合为Di{d1,d2,d3,…,dn},则平滑后的节点集合Di'{d1',d2',d3',…,dn'}为:

式中,di表示原矢量结果中的节点,di'表示平滑后矢量结果中的节点,f表示计算相邻三点组成三角形内心点的函数,其表达式为:

式中,X和Y分别表示di'的横纵坐标,Xi和Yi分别表示di的横纵坐标,a表示边didi-1,b表示边di-1di-1,c表示边di-1di。
依次计算得到平滑后的结果Di',得到的平滑后的线要素网络为由Di'所组成的路段集合{D1',D2',…Di'…Dn'}。
3 实验分析
为了验证本文所提出的方法在对实际的地物要素自动提取结果进行平滑时的适用性和有效性,本文以道路自动提取结果矢量数据为例,进行了实验验证和分析。
3.1 实验环境准备
由德国Definiens公司开发的软件eCognition是当前主流的地理影像分析软件[15],本文使用eCognition8.0对某区域Spot2.5m真彩色RGB融合影像进行道路自动提取的矢量结果(如图3所示)为实验数据。

图3 eCognition8.0对Spot2.5m真彩色影像道路自动提取结果Fig.3 Roads automatic extraction result from the true color image of Spot2.5 by using eCognition8.0
程序使用C#语言在VS2013平台.NET4.5环境下实现,操作系统windows10,如图4所示。

图4 道路自动提取结果平滑处理程序界面Fig.4 The interface for automatic road extraction and smoothing
3.2 平滑结果分析
使用本文所提出的方法对所选择的实验数据进行了平滑实验,得到实验结果如图5所示。其中,红色实线表示道路提取结果,黑色实线为平滑后的道路,图a为图b虚线内部分的放大显示。从图中可以明显看出,平滑结果对原数据噪声较大的部分平滑力度更大,对于噪声较小部分的平滑力度较小,具有自适应平滑的效果,且平滑结果的光滑程度明显优于原始的道路提取结果。

图5 道路自动提取结果平滑前后对比Fig.5 The comparison of roads automatic extraction result before and after smoothing
综上,本文提出的算法的具有以下两点优势:
①无需预先设置阈值,具有自适应能力;
②具有较好的平滑效果,能够很好地保持道路的形态特征。
同时,该算法还存在一些局限:
①更适用于节点密集的矢量要素平滑;
②只能起到平滑作用,不能解决自动提取结果中的不连续问题。
4 结束语
遥感影像自动提取结果中的不光滑现象严重影响数据质量和可视化效果,研究对其进行自动化地快速平滑方法具有重要意义。本文研究了现有的线要素平滑方法,分析了其适用范围和局限性,并根据地物自动提取的原理分析了噪声的来源和特点,提出了一种面向遥感影像自动提取结果的线要素自适应平滑方法。以实际数据为例进行的实验表明,本文提出的方法能够保持地物的基本形态特征,并具有较好的平滑效果。但本文提出的方法更适用于节点密集的矢量要素,且不能解决自动提取结果不连续问题。因此,对方法进行更深入的研究和改进,发展适用范围更广的自适应方法是今后的努力方向。
