相控阵水平测流仪的研制
2017-10-14杭亮彭阳明
杭亮 彭阳明
(第七一五研究所,杭州,310023)
相控阵水平测流仪的研制
杭亮 彭阳明
(第七一五研究所,杭州,310023)
针对港口流场和水文环境监测的市场需求,研究并开发了一种高精度的相控阵水平测流仪。该测流仪以低功耗FPGA芯片Spartan-6 XC6SLX45和MCU芯片MSP430F149IPWR为核心,配合发射机和接收机构建的硬件平台,利用多普勒频移算法,实现了对水流速度及流向的计算;湖上试验结果表明在测量范围内能正确监测流场变化,满足实际使用要求。
相控阵水平测流仪;多普勒频移;流速;流向
随着我国水利事业不断发展,水文信息化是当前水文工作的主要发展方向,而测量的信息化是水文信息化的前提和保障。目前,水文测量所用的测流仪器基本都为进口品牌,如TRDI、NORTEK及LinkQuest等,国内同类产品市场份额很低,尤其相控阵水平测流仪国内尚无此类产品。
针对市场及国产化的需求,本文设计了一种相控阵水平测流仪,利用多普勒效应获得波束方向的流速信息,并采用矢量合成法,计算水流的流速和流向。利用水平测流仪固定安装进行流速流向测量,对流场不产生任何扰动,并且一次可以测量多个不同距离剖面层的流速流向信息。
1 基本原理[1]
相控阵水平测流仪是利用水声换能器向水体发射声波信号,并接收水体中声波散射体的反射信号,通过分析接收到的两个波束回波信号的多普勒信息,从而得到不同距离水层的流速和流向,波束示意图如图1所示。
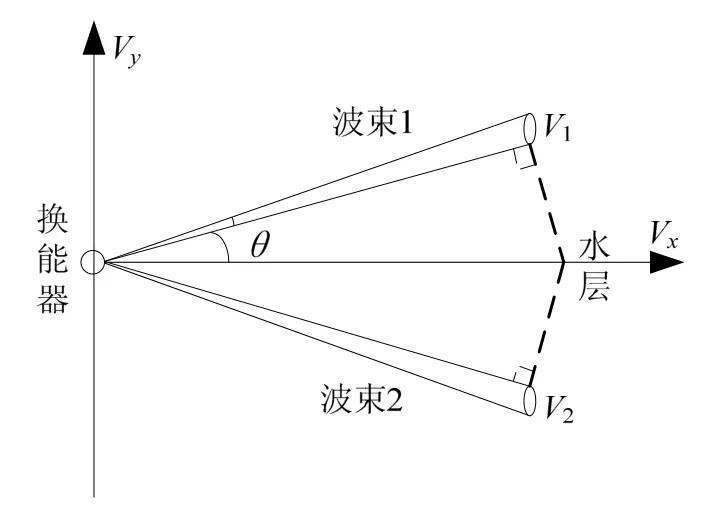
图1 波束示意图
当频率为f0的声波沿波束方向在水中传播时,有一部分能量经水流而动的散射体散射回来,这些回波信号经换能器接收,处理后可以测得其频率为fr。根据多普勒频移原理,只要声源(或接收器)与散射体之间有相对运动,则fr≠f0,其差值为fd。水平测流仪接收波束的多普勒频移fd与散射体随水流而动的速度V的关系是:

其中fd为多普勒频移,Hz;fs为发射的声波频率,Hz;c为水中声速,m/s。由式(1)推导得出两个波束测得的径向速度:

其中f1是波束1的回波频率,f2为波束2的回波频率,f0为发射频率。
由图1可知,将实际水流流速V分解为Vx、Vy两个分量,则Vx在波束1、波束2径向上测得的流速分量为Vxcosθ,流向相同;Vy在波束 1、波束 2径向上测得的流速分量为Vysinθ,流向相反,所以实际二维流速Vx、Vy为::

式中,θ为V1、V2与Vx的夹角;将式(2)、(3)代入式(4)、(5),推导出

由于采用多元相控阵,基阵可布成平面,无需使用不同指向性的换能器,从而减少了体积,便于安装。
2 硬件设计
2.1 系统组成
相控阵水平测流仪主要包括相控阵、电源、发射机、信号处理机、接收机、防雷电路。信号处理机产生驱动信号,经过发射机功率放大后传输给换能器,换能器通过陶瓷元件振动将电信号转换为声信号,辐射到水体中。同时换能器接收水体的回波信号,接收机滤波放大后,传输给信号处理分机分析计算后,通过RS422将结果传给上位机。系统框图如图2所示。

图2 系统框图
2.2 信号处理机
信号处理机主要将前端采集的数据进行处理,处理完的数据存入SD卡,或者通过RS422或CAN总线向外传输,其组成框图见图3。此接口还用于设置系统采集参数,具有发射信号产生、接收信号采集和处理、对外通讯、数据存贮和电源控制、外同步控制等功能。

图3 信号处理机框图
信号处理机以低功耗FPGA芯片Spartan-6系列和MCU芯片MSP430F149IPWR构建[2]。Spartan-6系列是Xilinx公司推出的低功耗FPGA,采用低功耗的45 nm工艺技术,提供先进的电源管理技术,广泛应用于工业领域。
MSP430F149IPWR是TI公司设计生产的一款超低功耗的16位单片机,为各种低功耗工业和便携式应用提供了终级解决方案[3]。FPGA芯片负责时钟产生、ADC采样控制、数据采样存储、DA控制、对采样数据进行波束形成、控制SD卡存储和读取等;MCU芯片主要负责总体流程控制、电源控制和参数控制。
2.3 发射机
信号处理机输出的两路控制编码信号经过隔离放大、谐振滤波和匹配后,发射机输出相应的电信号,通过收发转换电路,将两路相位差180°的功率信号分别加到4路换能器上,形成2个发射波束。组成框图见图4。

图4 发射机框图
2.4 接收机
接收机主要用于接收相控阵4路模拟信号的输入和信号的预处理。首先是收发转换,对接收到的4路信号进行放大、滤波、时间增益控制等信号预处理,最后输出至信号处理机采集电路,其组成框图见图5。

图5 接收机框图
2.5 防雷电路[4]
相控阵水平测流仪主要安装在开阔的港口或者湖泊,使用环境比较恶劣,尤其是夏季,雷雨天气频繁,雷击形成的过电压和过电流很容易对设备的端口造成永久性损害,所以必须要增加防雷设计。防雷电路框图如图6所示。

图6 防雷电路框图
3 软件设计
系统与上位机通过RS422接口通讯,系统在工作过程中的任意时刻都接收来自上位机的命令,在下一个工作周期开始之前更新接收到的参数,同时系统通过RS422通讯接口将计算结果按照一定的格式上传至上位机。FPGA与单片机使用SPI和若干GPIO口进行通讯,FPGA需要与单片机协调处理:电源控制、参数传递、数据传递。FPGA运行算法相关的流程如图7所示。
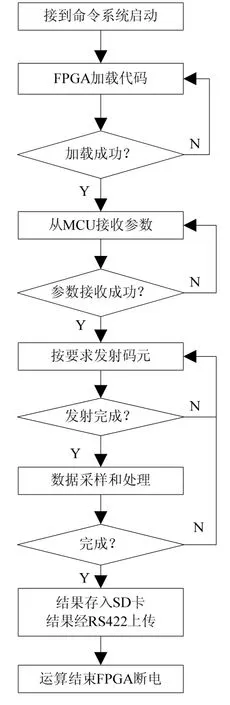
图7 软件流程图
4 试验结果
4.1 比测方法确认
试验中所用的数据处理方法参照 HY/T 102-2007 《声学多普勒流速剖面仪检测方法》中数据处理方法进行分层数据处理。对选定的GPS测量数据和被检测流仪的分层测量数据分别按公式(8)、(9)计算样本平均值、样本标准差:


根据文献[5]中检测结果的合格判据,选取显著性水平a=0.01,查相关系数显著性检验表确定自由度r=n−2(n为测量数据组数)时的临界相关系数ra。当r≥ra时,认为二者相关,判据一成立。计算误差限。其中为被检测流仪流速标称示值误差,为GPS速度标称示值误差。当68.3%的VPi满足下式:

即VPi落在以回归曲线为中心±Δ的误差带内的概率不小于68.3%,判据二成立。当判据一、判据二同时成立时可以认为测流仪测速精度符合要求。
4.2 比测结果
测流仪湖上试验安排在千岛湖中心湖区,将测流仪安装在试验船的一侧,入水深度2 m,换能器辐射面与试验船的首尾线垂直,并使两个波束水平射向一侧湖水,安装图如图8所示。高精度差分GPS包括一个基准站和一个移动站,基准站安装在试验湖区附近岛屿,移动站放置于测流仪上方,确保GPS接收到位置信息与测流仪位置一致。试验水域开阔,湖底相对平坦,深度为50 m,湖水流速趋于0,试验过程中,试验船在 3~8 kn 之间做变速航行,测流仪所测的水流速度相当于试验船的航行速度,同步采集测流仪和GPS速度数据,比测结果如图9、10所示,测流仪流速和流向如图11所示。分析试验数据,测流仪速度曲线与 GPS速度曲线基本吻合,数据有效率80%以上,比对的数据相关系数高,如表1所示。

图8 安装示意图

图9 升速比测

图10 降速比测

图11 流速、流向图

表1 测流仪、GPS精度考核记录表
通过显控软件实时测量的最大剖面距离超过250 m,优于200 m的性能指标,能够反映真实的水流流向。试验结果表明,相关系数r均大于ra=0.254 0。查相关系数显著性检验表,ra置信概率均大于标准 68.3%的要求,所以相控阵水平测流仪的测速性能达到了要求。
5 结论
本文从多普勒测速基本原理出发,结合相控阵技术,以FPGA和单片机为基础搭建低功耗硬件平台,通过湖上试验进行性能验证,结果表明相控阵水平测流仪能够真实反映实际流场的流向和流速信息。此外,相比于传统活塞式测流仪,相控阵水平测流仪具有体积小和精度高的优点,对该设备在水文监测领域的应用推广起到重要的作用。目前,相控阵水平测流仪已成功应用于浙江省交接断面水文监测和宜昌皇陵庙水文监测项目中。
[1]田坦,刘国枝,刘国枝.声纳技术[M].哈尔滨:哈尔滨工程大学出版社,1999:156-168.
[2]Xilinx Corporation.Spartan-6 FPGA Data Sheet[Z].2015.
[3]Texas Instruments.MSP430 Ultra-Low-Power Microcontrollers Data Sheet[Z].2012.
[4]周龙民,孙义成,殷建强.RS-485总线防浪涌技术[J].低压电器,2009,(13):31-33.
[5]中国国家标准化管理委员会.声学多普勒流速剖面仪检测方法:HY/T 102-2007 [S].中国标准出版社,2007.
