噪声测量潜标主控模块设计与实现
2017-10-14傅翔毅王科明韦俊霞李东明
傅翔毅 王科明 韦俊霞 李东明
(第七一五研究所,杭州,310023)
噪声测量潜标主控模块设计与实现
傅翔毅 王科明 韦俊霞 李东明
(第七一五研究所,杭州,310023)
设计并实现一种应用于噪声测量潜标的主控模块,完成潜标在低功耗和高速数据采集并存条件下对多测层水听器、温度深度传感器的同步接收处理存储工作。主控模块以华北工控的EMB-3500主控板为开发平台,基于嵌入式Linux系统和Qt环境进行开发,满足低功耗运行、高速数据采集、传输、存储以及多任务处理等设计需求。通过试验,验证该主控模块达到噪声测量潜标的使用要求,可用于浅海海洋环境噪声调查中连续作业或定时作业等场合。
噪声测量;潜标;主控模块;程序设计
海洋环境噪声是海洋声场的背景场,通常被当作干扰项。对海洋环境噪声的研究目的是为了降低或抑制环境噪声对水下设备的干扰,提高水下设备的性能和作用距离[1]。随着海洋科学研究、海洋综合利用和国防事业发展的需要,国内对海洋水下环境监测仪器设备的需求日益增加,潜标数据采集系统在水声研究中也得到了越来越广泛的应用[2]。噪声测量潜标是一种系泊于海下通过释放装置回收的锚定海洋水下环境探测系统,不受海面气象条件影响,对海洋环境噪声及周边温度信息进行长期、定点、连续、多测层多参数同步测量。潜标设备要求在目标海域海洋信息剖面测量中,对多路水听器以及多路温度和深度传感器执行连续或定时的采集工作以及后续的处理存储等工作。主控模块作为探测系统的控制中心在潜标系统工作中发挥重要作用。
1 主控模块功能描述
噪声测量潜标系统组成框图如图1所示,分为阵系统、电子系统和上位机系统三部分。

图1 潜标系统组成框图
多路水听器和多路传感器完成对噪声数据和温深数据的采集工作;采集整合模块完成对水听器、传感器同步控制信号的发送、采集数据的整合以及与主控模块的数据传输工作;电源管理模块完成对电子系统工作的供电管理,依据主控模块的命令控制电子系统的上电、断电时间;时钟源模块完成对时间信息的获取工作;配置监测模块完成对潜标设备工作的操控和监测工作;主控模块作为该系统的重要组成部分,除需与上述的四模块进行通信,还要切换工作模式和作业方式、同步工作参数和处理采集数据等;数据分析模块对存储在电子系统的采集数据进行分析。因篇幅限制,本文主要对主控模块进行说明和阐述。
1.1 工作模式切换
主控模块主要有三种工作模式:配置工作模式、自检工作模式及正常工作模式。工作模式切换如图2所示。图中条件判断中如果不是“Y”则保持原状态不变,主控模块进入等待状态,等待下次的命令执行相应的工作,后文流程图中出现类似情况(如在文字中没有说明)照此处理。

图2 主控模块工作模式切换流程图
上电启动后主控模块进入正常工作模式,完成对采集数据的本地存储工作;主控模块收到用户发送的“停止设备工作”控制命令后进入配置工作模式,可进行设置/获取工作参数、清除设备存储数据等工作;收到用户发送的“启动设备状态自检”控制命令后进入自检工作模式,完成对采集数据上传工作。主控模块切换进入正常工作模式前需要先停止设备工作进入配置工作模式,确保主控模块可以在配置工作模式和正常工作模式之间安全切换。
1.2 作业方式切换
主控模块根据其运行工作参数中的工作周期和周期内工作时间,可设置其工作方式为连续作业或定时作业。作业方式切换如图3所示。

图3 主控模块作业方式切换流程图
上电启动后主控读取配置文件,或收到用户发送的“设置设备工作参数”指令,获取配置信息后进入相应的作业方式并更新配置参数。工作周期和工作时间均设置为全周期,则主控模块进入连续作业工作方式,即连续接收采集整合模块发送的水听器、传感器数据并处理;工作周期和工作时间均不设置为全周期,则主控模块进入定时作业工作方式(工作周期和工作时间中只有一个设置全周期则设置无效,保留上一次设置的工作参数或默认工作参数)。工作周期和工作时间可选信息参见表1,如工作周期设置为 1 h,周期内工作时间设置为 10 min,则主控模块每小时内只有10 min处于工作状态,剩余的50 min处于休眠状态。连续作业方式适用于潜标设备的短时作业(如在某一海域连续工作5 d),定时作业方式适用于潜标设备的长时作业(如在某一海域连续工作3个月,可设置工作周期3 h,工作时间10 min的组合模式)。

表1 工作周期和工作时间可选信息表
1.3 工作参数同步
主控模块长时间在水下工作,由于电池容量有限,需要主控模块根据用户需求对电源管理模块进行控制。主控模块向电源管理模块发送工作参数,解析出工作周期和周期内工作时间后控制主控模块和采集整合模块的上电、断电时间。主控模块把相同的工作参数写入配置文件以便下次断电重启后主控模块可以进入上次退出前的工作状态。
1.4 采集信息处理
采集信息包括水听器数据,传感器数据和时间信息。主控模块处于正常工作模式或自检工作模式,每接收1 s时长的水听器数据从时钟源模块获取一次时间信息。主控模块处于正常工作模式,采集信息打包存储到数据文件;主控模块处于自检工作模式,采集信息打包后通过网络上传给配置监测模块。为确保采集数据的时间有效性,在入水前需要通过 GPS授时设备对时钟源模块进行同步授时操作。
2 硬件设计
主控模块在水下连续上百小时对水听器数据进行高速采集处理存储工作,主要靠电池供电。主控板设计满足:低功耗(工作时单板功耗不大于 6 W)需求;多核处理、配置双网口和4串口;安装主流嵌入式操作系统,能基于该系统快速开发嵌入式多任务处理应用软件等需求。普通主控板单板功耗基本处于15~70 W之间,无法满足系统对低功耗的使用需求,经过调研选型,确定华北工控的EMB-3500主控板。该板采用Freescale 基于ARM Cortex-A9 架构的高扩展性4核高性能处理器,不仅具有超强的计算处理能力,同时拥有极低的功耗(功耗5 W,测试单板工作时功耗3 W左右,满足设计需求),支持双千兆网卡和12串口,可满足基于高速链路的数据传输和多任务实时处理工作,并解决高速数据传输处理存储时数据丢失的问题,具有稳定可靠的工业级产品性能。主控板内置有嵌入式Linux操作系统,提供相应的硬件驱动程序和Qt运行环境[3],方便用户的开发和部署等工作。
3 程序设计
主控模块程序采用 C语言编写,基于 Qt4.7.3平台开发,利用多核多任务多优先级处理技术,解决高速链路通信状况下多任务并行工作时采集数据易丢失问题,完成对采集数据接收存储、自检信息发送和网络监测等任务的并行处理和实时响应工作。主控模块上电后,首先读取配置文件中的工作参数,读取失败则依据默认值同步配置文件工作参数,同步电源管理模块工作参数,依据工作参数设定作业方式,启动网络监测任务,设置工作模式为正常工作模式,启动数据存储任务、自检信息发送任务和采集数据接收任务。主控模块为四个任务分配独立的核处理器,其中采集数据接收任务分配最高优先级 MAX,数据存储和自检信息发送分配优先级为 MAX-2,网络监测分配优先级为MAX-10。主控模块在采集数据接收任务和数据存储任务之间设置水听器数据存储信号量,通过该信号量的释放获取完成两个任务之间的数据有序传递工作;主控模块在采集数据接收和自检信息发送任务之间设置水听器数据上传信号量,通过该信号量的释放获取完成两个任务之间的数据有序传递工作。
3.1 网络监测任务
网络监测任务工作流程如图4所示,该任务为主控模块的核心任务,由主程序创建启动,接收配置监测模块发送的控制命令后执行相应的工作。

图4 网络监测任务工作流程图
通过该任务的执行,主控模块可方便的在配置工作模式、自检工作模式和正常工作模式之间完成切换,同时完成工作参数设置/获取、参数同步以及数据文件删除等工作。其中进入自检工作模式和正常工作模式前必须确保当前主控模块处于配置工作模式,否则不会执行切换工作模式操作。
3.2 采集数据接收任务
采集数据任务工作流程如图5所示,该任务为主控模块中优先级最高的任务,主控模块采用UDP组播网络通信方式接收来自采集整合模块的数据包,主控模块通过高速通信链路接收水听器数据,采用双缓存机制以2 500批为周期交替存入水听器数据缓存区1和2,之后根据工作模式释放相应的信号量通知后续任务执行。主控模块通过低速通信链路接收传感器数据,存入传感器数据缓存区。在采集周期的初始时刻从时钟源模块获取时间信息,确保采集数据的时间有效性。

图5 采集数据接收任务工作流程图
3.3 数据存储任务
该任务在主控模块处于正常工作模式时执行,工作流程如图6所示。

图6 数据存储任务工作流程图
启动后等待获取水听器数据存储信号量,获取水听器存储计数满 300,则创建新的数据文件,存储计数清零;传感器数据采集完毕,将传感器缓存区数据写入当前数据文件;缓存区1写满,则将该缓存区中数据写入当前数据文件,否则水听器数据缓存区2数据写入当前数据文件;存储计数自加1。
3.4 自检信息发送任务
该任务在主控模块处于自检工作模式时执行,启动后等待获取水听器数据上传信号量。传感器数据采集完毕则把传感器数据缓存区中数据发送给配置监测模块;水听器数据缓存区1写满,则该缓存区中数据采用 UDP单播网路通信方式发送给配置监测模块,否则把水听器数据缓存区2中数据发送给配置监测模块。
4 试验验证
主控模块上电工作,主控模块本身无显示输出,可通过配置监测模块对主控模块进行监控,完成工作模式和作业方式切换、工作参数同步、采集信息处理等工作;可通过数据分析模块对回收后的数据文件进行时频分析,进一步验证接收数据的有效性。试验中主控模块工作于自检工作模式,配置监测模块接收上传数据显示效果如图7所示。数据分析模块读取数据文件显示效果如图8所示。多次湖海试验中,主控模块都能按照控制流程完成数据采集处理,并同步获取水听器数据和温度深度传感器数据。
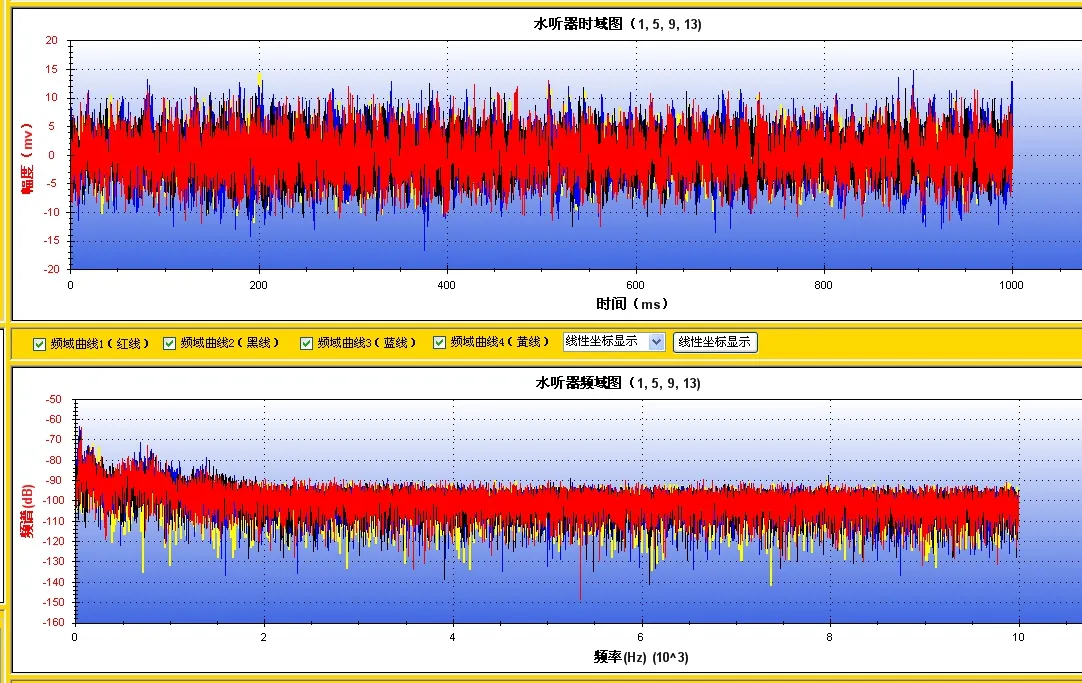
图7 配置监测模块显示效果图

图8 数据分析模块显示效果图
5 结论
本文描述的主控模块已在噪声测量潜标设备上正常工作,具备在浅海作业区短期或长期工作的能力,具有较强的可靠性和良好的应用前景。同时主控模块的研发为低功耗条件下高速同步采集多路水听器和多路温度深度传感器数据的噪声测量潜标研制打下了基础,加速潜标设备的产业化。
[1]郭毅新,李凡,铁广朋,等.海洋环境噪声研究发展概述及应用前景[J].物理,2014,43(11):724-731.
[2]王振,刘振江,崔浩,等.海洋潜标数据采集系统的设计实现与试验测试[J].海洋技术,2013,32(4):6-10.
[3]李文帆,刘志刚,伍文城,等.基于 Qt的电力系统地理接线图绘制软件设计[J].电力系统自动化,2013,37(7):72-76.
