一种基于OFDM的自同步穿墙雷达系统
2017-10-13王先达李舟帆张建秋
王先达,李舟帆,李 旦,张建秋
(复旦大学 信息科学与工程学院 电子工程系,上海 200433)
一种基于OFDM的自同步穿墙雷达系统
王先达,李舟帆,李 旦,张建秋
(复旦大学 信息科学与工程学院 电子工程系,上海 200433)
本文提出了一个自同步的穿墙雷达系统.不同于现有利用外部同步时钟的穿墙雷达系统,它是采用基于正交频分复用(OFDM)的自同步技术和干扰对消算法,来解决有关收发端同步及强干扰对消问题,进而通过多载波融合波达角估计算法,进一步提供了障碍物后人体运动状况的检测性能,在软件无线电平台上,搭建了两发一收测试系统对提出的系统进行了验证.实验结果表明,该系统可实时探测障碍物后1.5m内的人体运动状况.
通用软件无线电外设; 正交频分复用; 穿墙雷达; 干扰对消; 谱估计
使用射频信号探测障碍物后的运动目标具有较大的应用价值[1- 8],可广泛应用于反恐、消防、智能家居等领域.文献[1- 3,5]报道了利用接收信号的强度信息来探测目标的方法,它们通过检测反射信号的强度变化如平均强度、强度方差等来判断目标的运动状况.这种方法实现简便,但由于仅仅利用了信号的强度信息,因此测量结果精度有限.为了得到更精确的探测结果,文献[4,6- 10]研究了如何利用信道状态信息来获取目标运动状况的方法.文献[4]利用雷达中相控阵的测角原理,并让运动目标携带信号发射装置,再通过天线阵列来接收目标的发射信号,基于多重子信号分类(Multiple Signal Classification, MUSIC)算法[11]来获得目标波达角的估计,进而采用最大似然算法来获得运动目标的位置;文献[7]则是通过计算循环自相关函数和循环互相关函数来获得干扰源的信息,进而通过设计优化算法来对干扰源进行定位.然而,文献[4,7]都需要运动目标携带信号发射装置,显然这种方法仅仅适用于合作目标.对于非合作目标,则无法让目标携带信号发射装置,为了应对这一问题,文献[8]研究了利用干扰对消技术来检测不携带任何发射设备目标的方法,即: 通过分析无线发射信号穿墙并遇到目标再次穿墙返回到接收机信号的方法.由于接收机收到的信号是由待检测目标2次穿墙反射回来的信号,来自发射机耦合到接收机的信号,以及墙体和其他干扰目标反射回来的信号之和,使得待检测目标的反射信号,相对于其他所有耦合和反射信号之和就显得相当微弱.因此要想实现穿墙雷达(Seeing- through- walls Radar),就必须先对消所有不需要的耦合和反射信号,才有可能探测出待检测目标,这意味着穿墙雷达的关键技术问题就变成了强干扰环境中如何检测弱信号目标的问题.
近年来发展起来的5G的关键技术之一,即干扰对消技术[8,12- 14]可以用来解决此问题.文献[8]给出两发一收的干扰对消系统,该系统利用2个发射机和接收机分别形成的2条相对独立的信道,通过对2条信道分别进行估计,然后利用估计的信道参数来调整其中一个发射机的发射码字,其目的就是尽可能地希望2个发射机分别产生的强干扰信号,能在进入接收机前在空间相互抵消,以解决在强干扰环境中检测弱信号目标的问题.该系统由于收发分置,收发端设备不可避免地存在晶振偏差,从而导致收发端的载频存在偏差,而文献[8]是通过引入外部同步时钟来解决这一问题的.
本文提出一个自同步的穿墙雷达系统,它由2台发射机与1台接收机组成,其中2台发射机直接通过多输入多输出(Multiple- Input Mutiple- Output, MIMO)电缆连接,它们之间不需要外部同步时钟进行同步.2台发射机MIMO电缆来实现晶振,触发时间及以太网接口共享,这样就可视它们为同源发射机.而收发端的同步则是通过Sch&Cox算法[15]来实现的,包括接收端的定时同步及频率同步.为了便利干扰对消,采用了基于正交频分复用(Orthogonal Frequency Division Multiplexing, OFDM)[16]的信号传输方式,这样为对消发射机及周围静态物体所产生的强干扰而需要对信道参数进行求逆的过程得到简化,利用多载波融合的波达角估计方法,就可实现障碍物后目标运动状况的估计.最后,我们在通用软件无线电外设(Universal Software Radio Peripheral, USRP)N210平台上搭建了两发一收的自同步穿墙雷达系统,对上述系统进行了实验验证.
1 系统描述
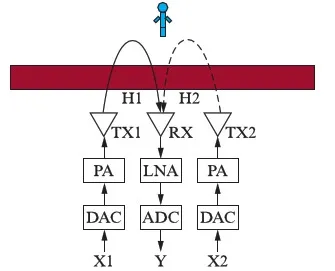
TX1,TX2: 发射机; RX: 接收机;PA: 功率放大器;LNA: 低噪声放大器;H1,H2: 2条独立信道;DAC: 数模转换器;ADC: 模数转换器.图1 系统示意图Fig.1 Diagram of the system
图1给出了本文系统的示意图,它由2台发射机TX1和TX2,以及1台接收机RX构成.由于待检测目标反射回来的信号相对其他信号如墙体反射的信号、发射机耦合到接收机的信号和其他干扰目标反射的信号强度弱很多,因此必须首先对消这些强干扰信号.其中1台发射机TX2是用来产生对消这些强干扰信号的.下面将介绍系统强干扰的对消原理及其相应的自同步技术.
1.1对消原理
如图1所示,当使用2台发射机时,接收机收到的信号是2台发射机分别发出的信号经过信道的作用线性叠加的结果.此时,接收机收到的信号可以表示为:
Y=H1X1+H2X2+N.
(1)
为了描述方便,式(1)采用离散频域表示法.其中:H1和H2分别表示发射机TX1和TX2到接收机的频域信道矩阵;X1和X2分别表示发射机TX1和TX2发送的频域符号;Y为接收频域信号;N为频域噪音矢量.重写式(1)如下:
(2)


然而,OFDM信令对频偏相当敏感,即此多输入单输出(Multiple- Input Single- Output, MISO)的系统必须考虑同步问题,而式(1)和(2)是系统完全同步后的表达式,一旦系统不同步,那么它们将不成立.为了解决这一问题,文献[8]将系统中3台设备连接一个外部统一的硬件时钟,复杂了系统,下面我们将介绍一个采用软件使它同步的方法.
1.2自同步技术
接收端同步需解决定时同步和频率同步.OFDM系统的定时同步是接收端通过检测信号帧头中有效信号的起始位置来判断的;而频率同步是为了解决收发双方设备本身晶振差异而导致的载频差异,其中频率偏移又包括小数倍频偏和整数倍频偏.
为解决接收端的同步问题,我们采用Sch&Cox算法[15].对于定时同步,设计一个时域前后两半时域相同的训练符号,接收端通过滑动自相关寻找峰值的方法来找到对应信号的起始点.即通过求式(3)中代价函数的峰值来获得有效信号的起始点:
(3)
其中:d为当前窗的位置;P(d)为当前窗口与下一等长窗口的相关值;R(d)是为自相关结果能量归一化的后一半符号的能量.对于小数倍频偏,式(3)峰值对应的相位信息即代表了小数倍频偏.而整数倍频偏,则需设计第2个训练符号,此训练符号在偶数倍频点与第1个符号差分编码,在接收端进行傅里叶变化后,通过训练符号序列位移数来获得其整数倍频偏.最终估计的频偏为[15]:

(4)

2 多载波融合波达角估计
传统的波达角(Direction Of Angle, DOA)估计需要一个天线阵列(一般为均匀线阵模型)来探测移动目标,而我们的系统只有一根接收天线,如果将目标运动视为匀速运动,那么接收机收到的周期性采样信号可以视为一个由天线阵列接收的信号.此时,有如下模型:
y=Ax+n,
(5)
其中:y=[y1,y2,…,yM]T∈M×1;M表示对均匀移动的目标进行了M次采样;A=[a(θ1),a(θ2),…,a(θk)]∈M∨k为k个信号源的导向矩阵,其中a(θi)=[1,e-j2πdsin(θi)/λ,…,e-j2π(M-1)dsin(θi)/λ]∈M×1,d=vT,其中v为目标的移动速度,T为采样周期,λ为波长;n=[n1,n2,…nM]T∈M×1为噪声矢量;x=[s1,s2,…,sk]T∈k∨1表示k个信号源.对于本文系统而言,所估计的信道中含有目标移动的DOA信息,此时意味着我们可以直接对所估计信道矢量h=[h1,h2,…hM]T进行处理来获取其目标信息.本系统采用的是平滑MUSIC算法[11].此时,数据协方差矩阵为:
(6)
此处假设共有N个快拍,E(·)指期望运算.对于OFDM系统而言,不同子带频率的信号均用于探测目标的DOA信息.我们将采用空间平滑的方法以去除目标之间的相干性[11],即将收到信号分为p个子阵列,分别计算p个子阵列的协方差矩阵,并进行平均,记为:
(7)
对上式协方差矩阵进行特征值分解,分别计算信号子空间及噪声子空间,记为:
(8)
其中:ΣS为主特征值组成的对角矩阵;US为主特征值所对应特征矢量组成的矩阵;ΣN则为对应噪声部分的特征值组成的对角矩阵,UN为其对应的特征矢量组成的矩阵.利用信号子空间与噪声子空间的正交性,得出MUSIC的功率谱[11]:

(9)
由于Wifi信号此时为宽带信号,多路子载波占用整个带宽.且多个不同的频率点均可用来测量目标的DOA信息,因此,可以将多路子载波结果融合,得出最终的MUSIC的功率谱,即为:
(10)
其中K为子载波个数.本文中OFDM共使用64路子载波,除去填零的子载波位置,有52路子载波用来测量DOA,此处K即为52.θ在[-90°,90°]变化,文中格点选为0.5°,对式(10)搜索谱峰即可完成DOA估计.
3 系统的实现及评估
我们使用3台USRP N210来进行系统实现.2台USRP用作发射机,通过MIMO线缆相连,另1台作为接收机.系统框图如图2所示.
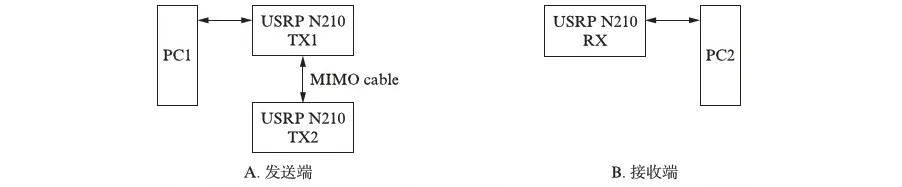
PC1,PC2: 上位机;TX1,TX2: 发射机;RX: 接收机;MIMO cable: 连接2台发射机的MIMO线.图2 USRP N210所搭建系统示意图Fig.2 Diagram of the building system with USRP N210

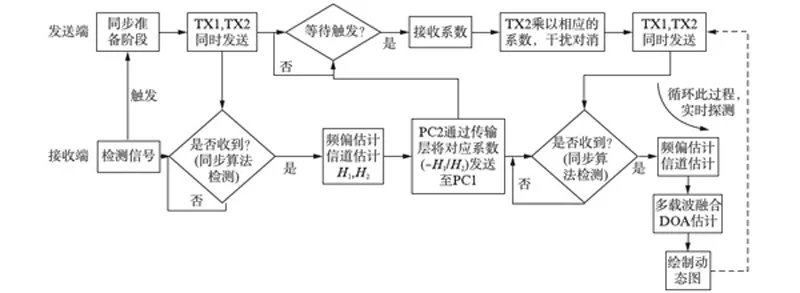
TX1,TX2: 发射机;PC1,PC2: 上位机;H1,H2: 信道参数;DOA: 波达角.图3 本文提出的算法流程图Fig.3 Flow chart of the proposed algorithm
整个系统测试地点选择在复旦大学物理楼521会议室.文献[8]的测试给出的结果是以15cm的空心墙为障碍物.它也给出了射频信号单路穿透不同建筑材料的衰减程度,2.4G射频信号经过15cm的空心墙单路的衰减为9dB,而2.4G射频信号经过4.4cm的实心木门单路的衰减为6dB.为了实现系统的实时性,而同时避开室内Wifi波段的干扰,系统发射的中心频率设为2G,采样率为250ksamples/s,OFDM信号分为64路子载波,52路有效子载波.图4给出测试装置的实物图.USRP N210搭建系统,2台USRP当做发射机,通过MIMO线缆连接;3台USRP均外接定向天线.需要指出的是,由于2台发送机也需要同时同频,我们用MIMO线缆将2台发射机进行直接连接,主-USRP通过MIMO线缆配置从-USRP的时钟及时间信息,2台USRP共享晶振、触发时间及以太网接口.这样,2台发射机便可视为同源.
3.1干扰对消测试
在USRP平台上我们对该穿墙雷达的干扰对消性能进行了测试,分别将发射机增益设置为1,5,10,15,18dB时,测试结果如图5所示.可以看出其对消干扰信号的能力约为23dB左右.同时,值得指出的是,上述实验是在未使用外部同步时钟的情况下进行测试的,其对消结果类似于文献[8]使用外部同步时钟的结果.另外,Jain等2011年[18]使用Balun变压器和Qhx220芯片来改变信号的幅度和相位来和自干扰信号匹配,由于很难找到精准的可编程器件控制延迟的精度在10ps,且芯片不能匹配宽带信号的延迟,功率增大时对消仅在20dB左右.Sahai等[19]使用开放无线研究平台(Wireless Open- Access Research Platform, WARP)来进行测试,由于其本身收发共用同一晶振,因此其无需考虑收发端的晶振偏差问题,但本文所测场景(收发分置)更加符合实际状况,如之前所述,本文给出了软件同步算法来解决此问题.
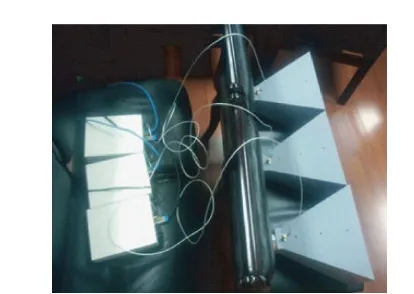
图4 测试装置的实物图Fig.4 The actual picture of test device
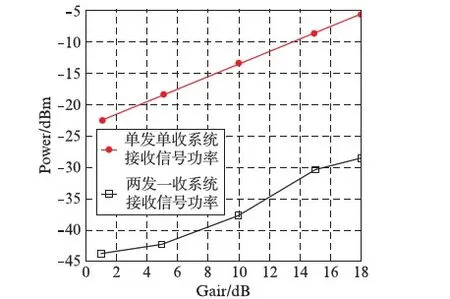
图5 干扰对消性能Fig.5 The performance of interference cancellation
3.2障碍物后运动目标识别(纵向运动)
测试地点还选择在复旦大学物理楼521室,对门后的运动人体进行识别.图6(见第76页)给出了测试场景示意图,3台USRP放置在障碍物一侧,人体在距离障碍物后15cm到1.5m的范围走动.假设障碍物后目标以1m/s速度运动,测试时3台USRP放置于障碍物另一侧位置不动.
为了便于解释,给出了对应角度变化的示意图如图7(见第76页)所示.可以看出,人体远离障碍物时,角度逐渐增大(θ1到θ2到θ3),当人体靠近障碍物时,角度逐渐减小(θ3到θ2到θ1).图8(见第76页)给出实际的测试结果,横轴代表相对时间,纵轴代表估计出的角度.从图8可以发现,当有目标发生了移动,我们的系统能实时将其捕捉,并发现目标运动方向,当目标移出观察范围时,整个的图谱又恢复至最初的情形.在图8(b)~(f)我们探测到运动情况是这样的: 人体出现在障碍物后15cm处,人体沿障碍物垂直方向运动,远离障碍物到达1.5m处,然后靠近障碍物到达15cm处,进而再远离再靠近,最后离开.可以看出,角度一开始增大,然后减小,增大,减小.例如图8(b),人一开始出现在障碍物后(此时为图中箭头所指1处),人远离障碍物一直到最远处(图8(b)中2处),此时,人返回,一直到距离仪器最近(图8(b)中3处),再远离至最远(图8(b)中4处),返回至初始点(图8(b)中5处).这与本文分析的人体远离障碍物即测得角度增大,靠近障碍物即角度减小的理论分析是一致的.说明我们的系统已经可以真实地探测到障碍物后面的人体运动情况.
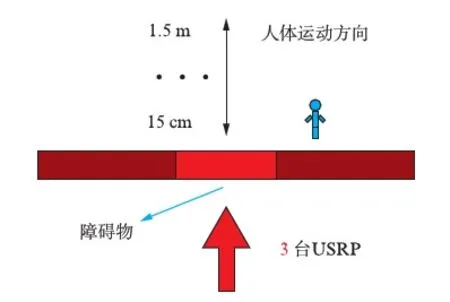
图6 障碍物后人体运动方向示意图Fig.6 Diagram of the direction of human movement after the obstacle

图7 人体运动角度变化示意图Fig.7 Diagram of the angular change in human movement
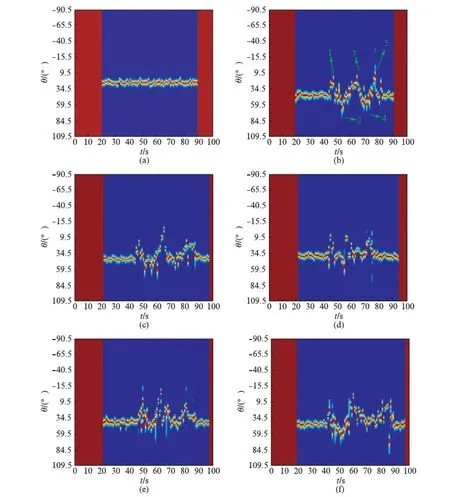
(a)为没有任何目标;(b)~(f)为纵向运动过程5次的测试结果.图8 人体纵向运动测试结果Fig.8 Test results for the human longitudinal movement
3.3障碍物后运动目标识别(横向运动)
接下来,我们探究当人体在横向运动时角度的变化规律.图9给出人体运动示意图.同样地,我们给出角度变化示意图,如图10所示.其中,θ1,θ2,θ3指人体运动方向的垂线与人和天线连线间的夹角.可以看出,此时角度变化是不明显的.作为对照,我们给出实测图,如图11所示.可以看出,角度变化不是很明显,与理论分析是一致的.

图9 障碍物后人体运动方向示意图Fig.9 Diagram of the direction of human movement after the obstacle

图10 人体运动角度变化示意图Fig.10 Diagram of the angular change in human movement
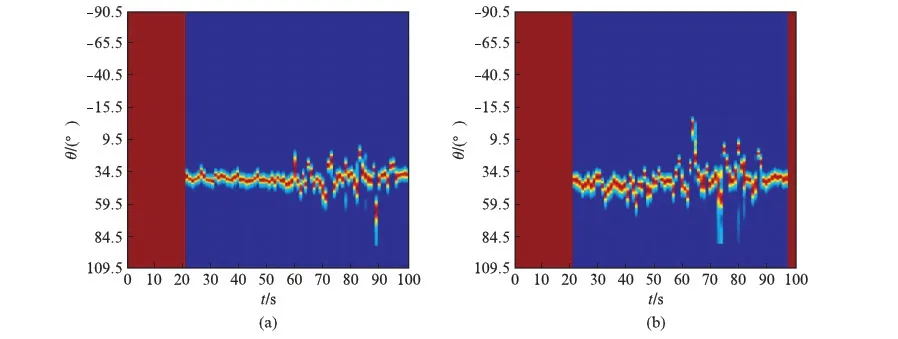
图11 人体横向运动测试结果Fig.11 Test results for the human lateral movement
4 结 语
本文描述了如何利用无线射频信号来探测障碍物后的移动目标.分别从OFDM软同步、信道估计,进而到干扰抵消,去除了强反射干扰信号;最后阐述了宽带OFDM信号的DOA估计算法.且对描述的系统在USRP N210的平台下进行了实验验证,结果表明: 系统能实时探测出障碍物后目标的运动方向.本系统不需要同步时钟,仅仅采用同步算法,亦实现了探测目标的目的,在简化系统硬件的同时增加了系统的实用性.
[1] SIGG S, BLANKE U,TROSTER G. The telepathic phone: Frictionless activity recognition from wifi- rssi[C]∥Pervasive Computing and Communications(PerCom), 2014 IEEE International Conference on. Budapest, Hungary: IEEE Press,2014: 148- 155.
[2] MELGAREJO P, ZHANG X, RAMANATHAN P,etal. Leveraging directional antenna capabilities for fine- grained gesture recognition[C]∥Proceedings of the 2014 ACM International Joint Conference on Pervasive and Ubiquitous Computing. Seattle, Washington DC, USA: ACM Press,2014: 541- 551.
[3] BANERJEE A, MAAS D, BOCCA M,etal. Violating privacy through walls by passive monitoring of radio windows[C]∥Proceedings of the 2014 ACM Conference on Security and Privacy in Wireless and Mobile Networks. Oxford, United Kingdom: ACM Press,2014: 69- 80.
[4] XIONG J,JAMIESON K. ArrayTrack: A fine- grained indoor location system[C]∥10th USENIX Symposium on Networked Systems Design and Implementation(NSDI’13). Lombard, IL, USA: USENIX Press,2013: 71- 84.
[5] SIGG S, SHI S, BUESCHING F,etal. Leveraging RF- channel fluctuation for activity recognition: active and passive systems, continuous and RSSI- based signal features[C]∥Proceedings of International Conference on Advances in Mobile Computing and Multimedia. Vienna, Austria: ACM Press,2013: 43- 52.
[6] PU Q, GUPTA S, GOLLAKOTA S,etal. Whole- home gesture recognition using wireless signals[C]∥Proceedings of the 19th Annual International Conference on Mobile Computing and Networking. Miami, Florida, USA: ACM Press,2013: 27- 38.
[7] JOSHI K R, HONG S S, KATTI S. PinPoint: Localizing interfering radios[C]∥The 10th USENIX Symposium on Networked Systems Design and Implementation(NSDI’13). Lombard, IL, USA: USENIX Press,2013: 241- 253.
[8] ADIB F, KATABI D. See through walls with WiFi![C]∥Proceedings of the ACM SIGCOMM 2013 Conference on SIGCOMM. Hong Kong, China: ACM Press,2013: 75- 86.
[9] ADIB F, KABELAC Z, KATABI D,etal. 3d tracking via body radio reflections[C]∥Proceedings of the 11th USENIX Conference on Networked Systems Design and Implementation. Seattle, USA: USENIX Association Press,2014: 317- 329.
[10] BHARADIA D, JOSHI K R,KATTI S. Full duplex backscatter[C]∥Proceedings of the 12th ACM Workshop on Hot Topics in Networks. College Park, Maryland, USA: ACM Press,2013: 1- 7.
[11] SHAN TJ, WAX M,KAILATH T. On spatial smoothing for direction- of- arrival estimation of coherent signals[J].IEEETransactionsonAcoustics,Speech,andSignalProcessing, 1985,33(4): 806- 811.
[12] BHARADIA D, KATTI S. Full duplex MIMO radios[C]∥Proceedings of the 11th USENIX Conference on Networked Systems Design and Implementation. Seattle, USA: USENIX Association Press,2014: 359- 372.
[13] BHARADIA D, MCMILIN E,KATTI S. Full duplex radios[C]∥Proceedings of the ACM SIGCOMM 2013 Conference on SIGCOMM. Hong Kong, China: ACM Press, 2013: 375- 386.
[14] LIN K C- J, GOLLAKOTA S,KATABI D. Random access heterogeneous MIMO networks[J].ProceedingsoftheACMSIGCOMMComputerCommunicationReview, 2011,41(4): 146- 157.
[15] SCHMIDL T M,COX D C. Robust frequency and timing synchronization for OFDM [J].IEEETransactionsonCommunications, 1997,45(12): 1613- 1621.
[16] HEISKALA J, TERRY Ph D J. OFDM wireless LANs: A theoretical and practical guide[M].Indianapolis, IN, USA: SAMS,2001: 51- 90.
[17] COLERI S, ERGEN M, PURI A,etal. Channel estimation techniques based on pilot arrangement in OFDM systems[J].IEEETransactionsonBroadcasting, 2002,48(3): 223- 229.
[18] JAIN M, CHOI J I, KIM T,etal. Practical, real- time, full duplex wireless[C]∥Proceedings of the 17th Annual International Conference on Mobile Computing and Networking. Las Vegas, USA: ACM Press,2011: 301- 312.
[19] SAHAI A, PATEL G, DICK C,etal. On the impact of phase noise on active cancelation in wireless full- duplex[J].IEEETransactionsonVehicularTechnology, 2013,62(9): 4494- 4510.
Abstract: A self- synchronization seeing- through- walls radar system is reported in this paper. Which is different from the already existing system used an external synchronization clock. Both the strong interference nulling and synchronization problems between the transmitters and receiver are solved by the self- synchronization technology and interference cancellation algorithm based on OFDM. The human movement status behind an obstacle is given by the combined multiple subcarriers direction of arrival estimation method. A prototype test system which includes two transmitters and a receiver is built on the software wireless platform to verify the above system. Experimental results show that our system can detect the human movement behind the obstacle within a 1.5 m maximum distance in real- time.
Keywords: USRP; OFDM; seeing- through- walls radar; interference cancellation; spectrum estimation
ASelf-SynchronizationSeeing-Through-WallsRadarSystemBaseonOFDM
WANG Xianda, LI Zhoufan, LI Dan, ZHANG Jianqiu
(DepartmentofElectronicEngineering,SchoolofInformationScienceandTechnology,FudanUniversity,Shanghai200433,China)
TN957.51
A
0427- 7104(2017)01- 0071- 08
2016- 02- 23
国家自然科学基金(61571131)
王先达(1992—),男,硕士研究生;张建秋,男,教授,通信联系人,E- mail: jqzhang01@fudan.edu.cn.
