永磁同步电机四电流矢量转子预定位技术研究
2017-10-13麦志勤刘计龙
麦志勤,刘计龙,肖 飞
永磁同步电机四电流矢量转子预定位技术研究
麦志勤,刘计龙,肖 飞
(海军工程大学舰船综合电力技术国防科技重点实验室, 武汉 430033)
由于机械式位置传感器成本高、体积大,永磁同步电机的无位置传感器控制技术逐渐成为研究热点。在永磁同步电机无位置传感器控制中,转子初始位置检测对电机启动非常重要。目前常用于检测转子初始位置的定子绕组电流比较法和高频信号注入法存在运算量大、对电流检测精度要求高、算法复杂等不足。针对这一问题,提出了一种四电流矢量转子预定位方法,该方法通过在永磁同步电机的定子中依次产生大小相等、方向固定的四个电流矢量,利用定子绕组电流与转子相互作用产生的电磁转矩,将转子拖动至设定位置实现转子预定位。通过分析转子的受力情况与运动方程,推算出实现转子预定位的电流幅值。最后,通过仿真对所提预定位策略进行了验证。
永磁同步电机(PMSM) 无位置传感器 四电流矢量 转子预定位 转子初始位置
0 引言
本文提出一种四电流矢量转子预定位策略确定转子初始位置。在虚拟同步坐标系中依次产生大小相等、方向相差p/2的四个恒定电流矢量,利用定子绕组电流与转子磁场相互作用产生的电磁转矩,将转子引导至最后一个恒定电流矢量施加的位置实现转子预定位。这种方法的优点是简单直观、实现容易,且转子在预定位阶段运动平稳,对于大容量永磁电机来说,由于较大转动惯量引起的预定位误差相对较小。文章对整个转子预定位运动过程进行了分析,并计算了实现转子预定位的电流幅值。仿真结果表明,所提策略能够使转子平稳到达目标位置。
1 转子预定位原理
同步坐标系下,表贴式永磁同步电机电磁转矩表示为
式中:代表电机相数;p代表电机极对数;代表定子绕组中永磁磁链的幅值;|1|代表定子绕组合成电流矢量幅值;代表定子绕组合成电流矢量1超前d轴的电角度,该角度称为转矩角。通常称q=|1|sin为转矩电流,则式(1)可改写成
(2)
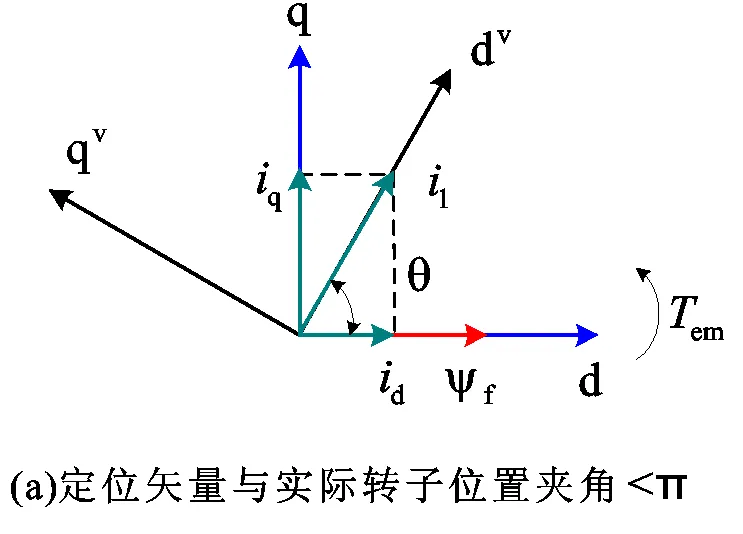
转子预定位原理如图1所示。以永磁体实际位置的N极方向为d轴作dq坐标系,通过电流闭环控制在目标位置产生一个恒定电流矢量,电流矢量位置记为dv轴,并以此为基础构建虚拟同步坐标系dvqv坐标系。由于电流闭环控制的作用,可认为其产生的定子绕组合成电流1幅值恒定。定子绕组合成电流矢量超前d轴电角度产生电磁转矩em,由式(1)和式(2)知,当小于p,q与em大于0,电磁转矩将沿逆时针方向拖动转子到dv轴位置;当大于p,q与em小于0, 电磁转矩将沿顺时针方向拖动转子到dv轴位置,实现转子预定位。
令|1|为能实现预定位的定子绕组合成电流矢量幅值,则(1)式可表示成:
(3)
如取=10,则em是转矩角的正弦函数,当(0,p/2),将em与转矩角关系以极坐标表示如图2

从图中可以看出随着转子运动,转子N极与dv轴的夹角由p/2变化到0,图中红点到原点的距离代表电磁转矩幅值,其与不同的转矩角一一对应,当转矩角逐渐变小,电磁转矩逐渐变小直至为零,最终停在目标位置附近。
2 四电流矢量转子预定位法实现
四电流矢量转子预定位实现过程是在永磁同步电机的定子中依次施加大小相等、方向固定的四个电流矢量,利用定子绕组电流与转子相互作用产生的电磁转矩,将转子拖动至设定位置实现转子预定位。
空载时转子要克服的转矩是空载转矩0,负载时转子要克服的转矩是0与L之和,L代表负载转矩。本文以空载时为例进行分析,带负载时与空载时分析原理相同。对于大容量永磁电机,忽略粘滞效应,电机工作时,定子绕组合成电流矢量产生的电磁转矩em需要克服空载转矩0从而带动转子转动,其运动方程方程为:
式中,代表转子的转动惯量,0代表电机空载转矩,代表转子电角速度。
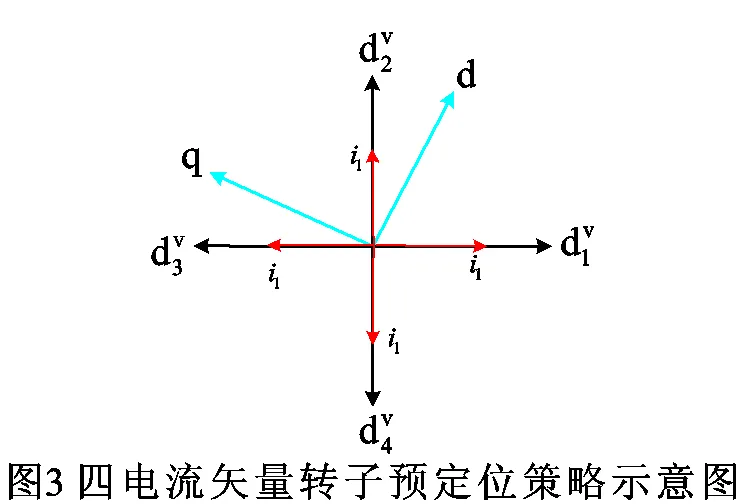
本文采用的四电流矢量转子预定位策略如图3所示,四个电流定位矢量的方向分别用四个虚拟同步坐标系表示,图中给出了这四个虚拟同步坐标系的dv轴。本文采用的四个预定位电流矢量电角度分别为0、p/2、p、3p/2。四个电流矢量轮流实施,逐步引导转子到达最终目标位置3p/2电角度处。
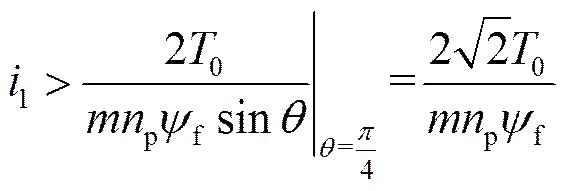
在转子预定位策略中,若转子处于某一块区域,所有电流矢量产生的电磁转矩都不足以使其转动,则该区域称为定位死区。通常空载转矩已知,在确定电流矢量施加位置以后,可借助电磁转矩与空载转矩相等这个特殊工况,求取使转子转动的绕组合成电流矢量临界值,消除定位死区。
根据电磁转矩的计算公式和四个电流矢量的相位关系,可以发现当转矩角为p/4时,所需要的绕组合成电流矢量幅值最大。即p/4电角度对于四电流矢量预定位策略来讲,是最恶劣的情况,若相差p/4电角度时施加的电流矢量能使转子实现预定位,则该预定位策略不存在定位死区。于是根据式(1),令=p/4,令电磁转矩等于空载转矩,则能使转子转动的临界值表示为
在预定位策略实施过程中,应该保证绕组合成电流矢量幅值大于该值。下图4描绘四电流矢量预定位全过程,依次在0、p/2、p、3p/2四个方向施加恒定电流矢量,经过一定时间后转子定位在目标位置3p/2。
3 定位电流计算与定位误差分析
图5给出了电磁转矩-转速-转矩角的关系示意图。图5 (c)中定位电流1=1*,空载转矩为0,转子从距离dv轴p/2的位置逆时针转动至dv轴。转子刚启动时转矩角等于p/2,电磁转矩有最大值emmax。随后,在电磁转矩从最大值逐渐减少直至等于空载转矩这一过程,由于作用于转子的合力矩恒大于零,转子一直加速转动。直至em减少至与0相等,转子转速达到最大值,此后转子开始减速直至停下。图中弧线是电磁转矩在转矩角[0,p/2]中的变化情况,其对转矩角的积分等于电磁转矩对转子做的功,表现为弧线与两坐标轴所围成的面积,记为1,该能量促使转子转动。水平线表示空载转矩0,在转矩角[0,p/2] 空载转矩对的积分等于空载转矩对转子做的功,表现为水平线与两坐标轴所围成的面积,记为2,该能量阻碍转子转动。由能量守恒定律,若这两个面积完全相等,电磁能完全转化为内能,转子便定位在dv轴处。
因此根据能量守恒定律求取能实现准确定位的绕组合成电流1*。在转矩角[0,p/2]中,忽略粘滞效应,当电磁转矩对转子做的功等于空载转矩对转子做的功

预定位时绕组合成电流幅值表达式为
(7)
当定位电流1≠1*,则会引起定位误差。图5 (a) 中,定位电流1远小于1*,最大电磁转矩em小于空载转矩0,转子不能转动。图5 (b)中,定位电流1小于1*,电磁转矩拖动转子转动所做的功不足以使转子转至位置目标位置,转子落后于目标位置。图5 (d)中,定位电流1大于1*,即电磁转矩拖动转子转动所做的功超过使转子转至目标位置所需要的总能量,转子超过目标位置。
同时,由1*的表达式可以看出,影响定位精度的因素在于空载转矩0,因此准确定位的关键在于准确确定空载转矩0。
4 仿真结果分析
为了检验上述方法对电机预定位策略的可行性,利用Matlab/Simulink搭建仿真模型进行仿真验证。通过仿真发现,四电流矢量预定位策略可以实现转子位置准确定位,当转矩角为p/4时,可以实现对转子的成功引导。同时,实验结果验证了空载转矩是影响定位电流大小的关键因素。空载转矩越大,所需要的准确定位电流越大,越不利于电机启动。系统模块图如图6所示。
仿真时所用的电机部分参数如表1所示。
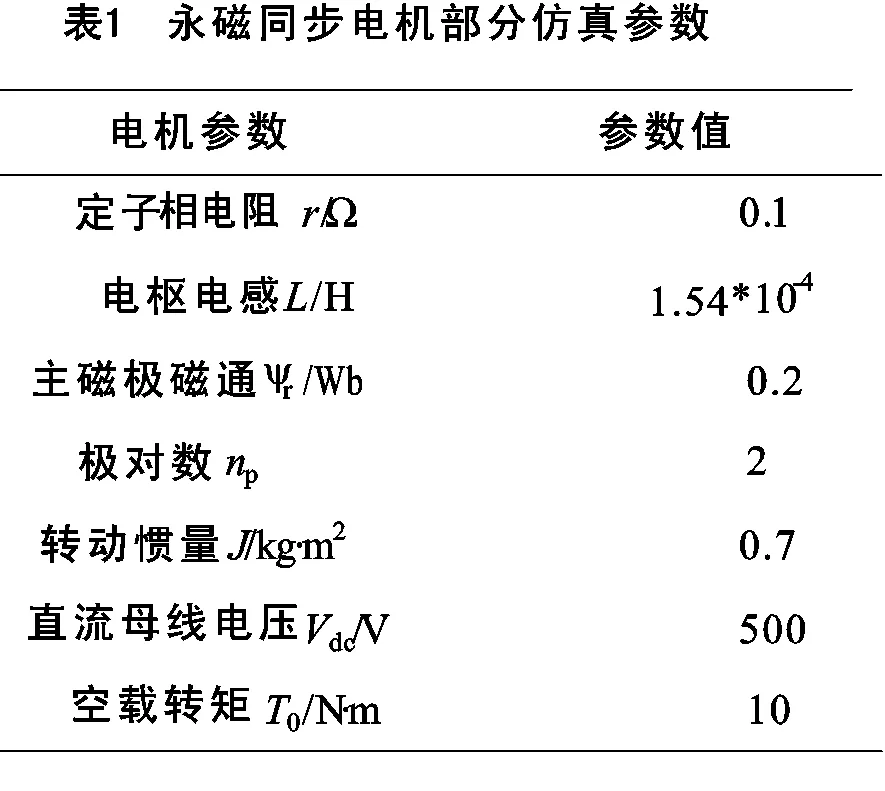
仿真环境中电机空载,三相逆变桥采样与控制频率5 kHz,直流母线电压500 V,电机空载转矩10 N·m,电机转子初始位置p/4。设定定位次序依次在0、p/2、p、3p/2四个方向,选择了四个幅值不同的定位电流矢量,分别进行仿真观察得到转子定位波形如图7所示。
图7(a)输入定子绕组合成电流矢量幅值为3.52A,产生的最大电磁转矩小于空载转矩,因此转子不能转动,转子保持位置不变,预定位失败。图7(b)输入定子绕组合成电流矢量幅值为18.64A,小于准确定位所需电流,可以看出转子定位结果均滞后于目标位置,预定位存在误差。图7(c)输入定子绕组合成电流矢量幅值为26.18A,等于准确定位所需电流,四次转子定位均能准确的定位在目标位置,准确实现预定位。图7(d)输入定子绕组合成电流矢量幅值为35.57A,大于准确定位所需电流,使得转子在转动惯量作用下超过了预定的目标位置,预定位存在误差。仿真结果表明,当能够准确计算出定位电流,就能使得转子准确定位在目标位置,验证了四电流矢量转子预定位策略的可靠性。
5 结论
本文提出一种针对永磁同步电机的四电流矢量转子预定位技术,采用了四个相差p/2电角度的电流矢量,轮流施加在电机定子绕组上,最终实现将电机转子定位在目标位置。分析了四电流矢量转子预定位阶段的转子运动过程、转子运动方程以及受力情况。运用转子运动过程中的能量守恒原理,计算了实现精确定位所需的定子绕组电流,空载转矩是影响预定位阶段所施加的定子绕组电流幅值的重要因素。应用该技术,使电机启动前明确了转子初始位置,为大容量永磁同步电机的无位置传感器控制提供了重要的初始位置参数。
[1] 李冉. 永磁同步电机无位置传感器运行控制技术研究[D]. 杭州: 浙江大学,2012.
[2] 刘颖. 永磁同步电机脉振高频信号注入无位置传感器技术研究[D]. 南京: 南京航空航天大学,2012.
[3] Zhu Z Q, Gong L M. Investigation of effectiveness of sensorless operation in carrier-signal-injection based sensorless control methods[J]. IEEE Transactions on Industrial Electronics, 2011, 58(8): 3431-3439.
[4] Paul P A, John F W. Review of position-sensorless operation of brushless permanent-magnet machines[J]. IEEE Transactions on Industrial Electronics, 2006, 53(2): 352-362.
Research on Presetting Rotor Position Technique for PMSM with Four Current Vectors
Mai Zhiqin, Liu Jilong, Xiao Fei
(National Key Laboratory of Science and Technology on Vessel Integrated Power System, Naval University of Engineering, Wuhan 430033, China)
TM351
A
1003-4862(2017)03-0040-05
2016-09-15
国家自然科学基金(51477180)
麦志勤(1992-),男,硕士研究生。研究方向为永磁同步电机驱动控制技术。