航空起动发电系统电动运行无传感器控制研究
2017-10-12李岩,吴迪,李运
李 岩,吴 迪,李 运
(1.海军航空工程学院 控制工程系,山东 烟台264001;2.海军航空工程学院 研究生管理大队,山东 烟台264001;3.海军驻贵阳地区军事代表办事处 贵州 安顺561000)
航空起动发电系统电动运行无传感器控制研究
李 岩1,吴 迪2,李 运3
(1.海军航空工程学院 控制工程系,山东 烟台264001;2.海军航空工程学院 研究生管理大队,山东 烟台264001;3.海军驻贵阳地区军事代表办事处 贵州 安顺561000)
针对航空起动发电系统电动运行状态下,永磁同步电机在起动过程中必须要准确知道转子的速度和位置,提出了一种基于高频信号注入法的无传感器控制策略。向电机的凸极注入高频电压信号,通过滤波器提取出所需要的转子位置信号,并且不受参数影响,有效的解决了传统机械传感器带来的各种弊端,尤其是在零速和低速有很好的控制效果。搭建了高频旋转电压注入法的Simulink仿真模型,仿真结果证明了该方法的有效性。
六相永磁同步电机;无传感器控制;高频信号注入法;位置观测
Abstract:For the state of the electric operation of the air starting power generation system,the permanent magnet synchronous motor must exactly know the speed and position of the rotor during the starting process,a sensorless control strategy based on high frequency signal injection method is proposed.The salient pole of the motor is injected into the high frequency voltage signal,and the desired rotor position signal is extracted by the filter, and are not subject to the parameters that affect,effectively solve the disadvantages of traditional mechanical sensor,especially in the zero speed and low speed has a good control effect.The Simulink simulation model of high frequency rotating voltage injection method is set up,and the simulation results show that the method is effective.
Key words:six phase permanent magnet synchronous motor; sensorless control; high frequency voltage injection method;position observation
实现起动/发电双功能是现代航空电源系统的一个重要发展方向,其核心思想是使电源系统中的发电机一机两用,先当电动机起动发动机,再当发电机供电,从而革除了发动机的起动系统,有效地简化了发动机的附件,减轻了重量,提高了飞机的可靠性和总体性能,成为未来飞机电源系统研究的一个热点[1-4]。而永磁同步电机因其结构简单可靠,控制性能优良,常被应用于航空起动发电系统中。
当发电机作为电动机运行时,必须要准确知道转子的速度和位置,采用传统的机械传感器来检测转子的位置和速度,使得整个系统的稳定性和可靠性降低,并且存在高成本和安装复杂等弊端。为了解决机械传感器带来的的各种缺陷,无传感器控制技术成为了现在研究的热点方向[5-9]。
高频信号注入法作为一种无传感器控制方法,是根据电机转子结构中的凸极,在静止坐标系上注入旋转高频电压载波信号[10],然后通过检测其对应高频电流的响应来确定转子凸极的速度和位置。这种方法追踪的是转子的空间凸极效应,对电机的参数变化不敏感,鲁棒性好,能较好解决在零速和低速下转子速度和位置的估计。
1 六相永磁同步电机数学模型
六相永磁同步电机在静止坐标系下的电压方程为:

磁链方程为:

其中,p为微分算子,Rs为定子电阻,ψf为永磁体磁链,θr为转子位置角,L=(Ld+Lq)/2 为平均电感,ΔL=(Lq-Ld)/2为半差电感。 Ld和Lq分别为同步旋转坐标下的直轴同步电感和交轴同步电感[7]。
在静止坐标系α-β轴上分别注入高频旋转电压信号:

其中,Vh为高频旋转电压幅值,ωh为高频旋转电压频率。当电压频率很高时,电机的阻抗主要为电感,在定子电阻上的压降忽略不计,因此高频信号在静止坐标系下产生的定子磁链为

求解上式,可得高频电压产生的高频电流响应为:

2 转子的位置估计
2.1 负相序分量提取
由上节可知,高频电流中含有正相序和负相序电流,只有负相序分量中含有转子位置信息,因此为了获得转子位置信息必须对载波电流信号进行解调滤波处理,滤除基波电流,低次谐波电流,PWM开关谐波电流以及正相序分量,进而得到高频电流负相序分量[8-10]。同时用低通滤波器滤除载波电流中的高频信号,得到基波电流信号,形成电流闭环控制。
2.1.1 纯延时滤波
因为基波和低次谐波的频率远低于高频信号的频率,而PWM开关谐波的频率远高于高频信号的频率,一般采用一个合适的带通滤波器来实现这两种频率信号的滤除。但经过带通滤波的高频电流,其幅值会有衰减,相位发生滞后,将影响之后滤波和转子位置估计的准确性,文中设计一种纯延时滤波[11-13]。
这种方法的原理是将检测得到的电流信号延迟高频电流信号的半个周期即然后原电流信号再与延时后的电流信号做差即可得到高频电流。以α轴电流为例,检测到的电流为基波电流和高频电流之和,即:
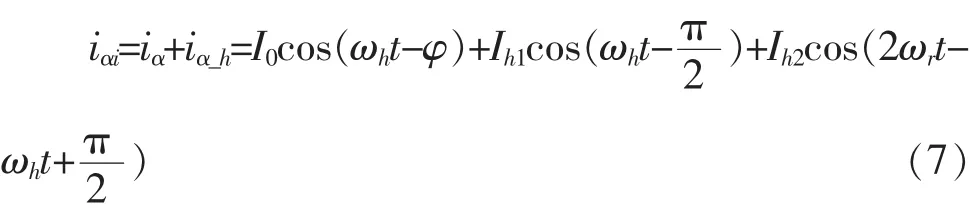
当电流延时半个周期后作差,可得:
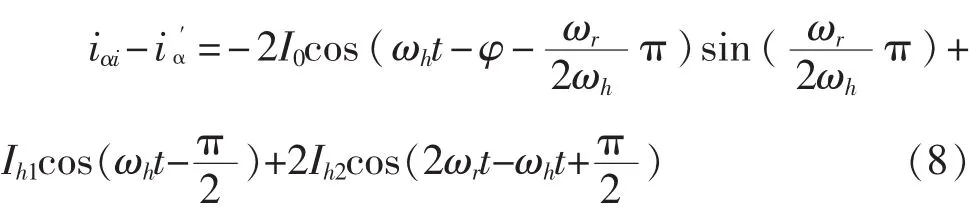
由式(8)可以看出,经过纯延时滤波后的基波电流减小到原来的倍,由于 ωh>>ωr,所以趋近于零,基波电流的衰减很大,几乎都被滤除了。而高频电流经过滤波后变为原来的2倍,这样可以用较小的高频电压信号得到较大的高频电流信号,从而避免了注入较大高频电压信号带来的系统噪声和功率损耗。并且这种滤波方法不会使高频电流相位滞后,从而保证了估测转子位置的精度。
2.1.2 同步轴高通滤波
通过纯延时滤波环节提取到了高频电流响应信号,其中包含了正相序和负相序电流分量,为了得到包含有转子位置信息的负相序电流分量,这里采用同步轴高通滤波器来进行滤波。同步轴高通滤波器通过坐标变换把高频电流矢量变换到一个与注入的高频电压矢量同步旋转的参考坐标系中[14]。
在式(6)两边同乘 e-jωht,可得:

式(9)中,高频正相序电流为一直流分量,只需用一个高通滤波器就可以完全滤除,得到再将Iαβ_h2变换到静止坐标系下就可以提取到负相序电流分量:
2.2 锁相环估计位置信息
通过同步轴高通滤波器可以得到负相序电流分量,下面要将位置信息从负相序分量中提取出来。这里采用基于锁相环理论的方法来估计转子位置信息[15]。锁相环一般由鉴相器、环路滤波器和压控振荡器组成,其原理图如图1所示。

图1 锁相环原理图
2.2.1 鉴相器
鉴相器又叫做相位比较器,它的主要作用是得到输入和输出信号的相位差,并将其以电压信号的形式作为输出,这里利用相位比较器将估计转子位置角和实际转子位置角进行比较,从而得到转子误差角。
经过同步轴高通滤波器的到的负相序电流式(10)从极坐标变换到α-β坐标系下得:


若转子的估计位置角十分接近实际位置,则:

2.2.2 环路滤波器
环路滤波器的主要作用是对转子位置的误差角进行环路滤波,滤除噪声以及干扰信号,确保锁相环的稳定性。这里增加一个PI调节器来替代环路滤波器实现环路滤波功能,转子位置误差角通过PI调节器可以得到转子角速度的估计值。
2.2.3 压控振荡器
压控振荡器是一种电压-频率变换装置,它在锁相环中起到了一次积分的作用,因此设置一个积分器,通过一次积分就能达到压控振荡器的效果,即对转子角速度的估计值进行积分,就可以得到转子位置估计值
3 仿真模型及结果
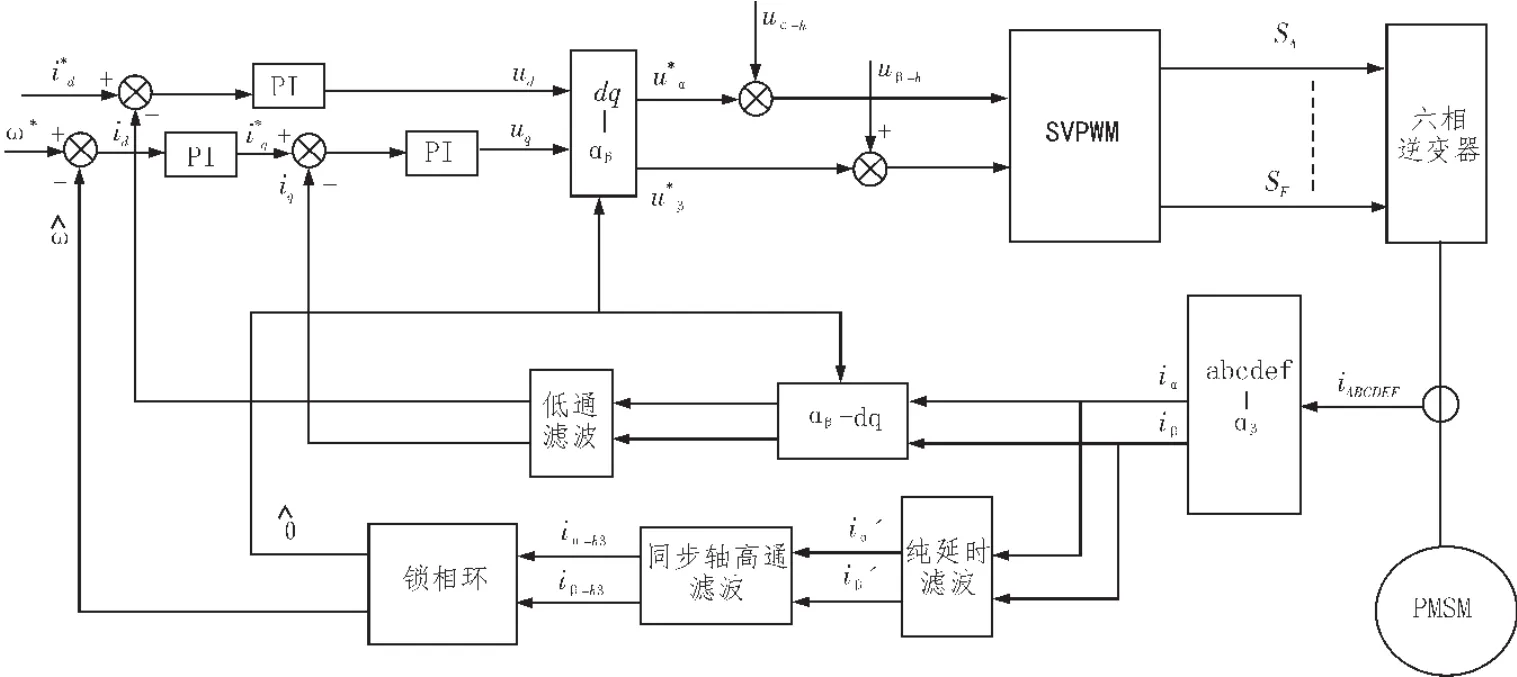
图2 高频信号注入法原理图
上节分析了基于高频旋转电压注入法的六相永磁同步电机无传感器控制系统的原理和各滤波环节的设计方法,为了验证所采用方法的有效性,在Matlab/Simulink平台上搭建系统仿真模型,对系统进行仿真研究。系统的原理图如图2所示,整个无传感器控制系统由PMSM模块、坐标转换模块、逆变器模块、高频旋转电压注入模块、速度调节模块、电流调节模块以及滤波器和锁相环模块构成。
下面对一台六相永磁同步电机进行Simulink仿真验证, 其中电机的参数为:J=0.008kg*m2,p=2,Rs=2.4 Ω,Ld=0.007 H,Lq=0.005 H,ψf=0.167 Wb。取转速给定为50 rad/s,给定转矩为 10 N·m,到 0.9 s时,转矩变为5 N·m,系统仿真运行,得到的转速跟踪,跟踪误差,位置跟踪和位置跟踪误差波形分别如图3~图6所示:
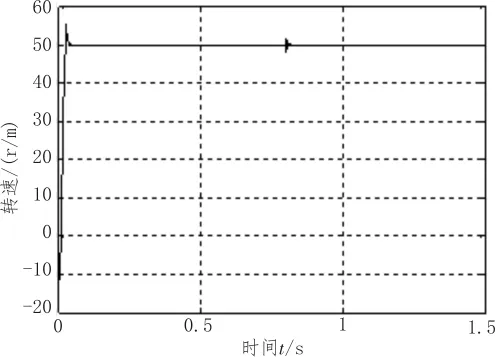
图3 转速跟踪
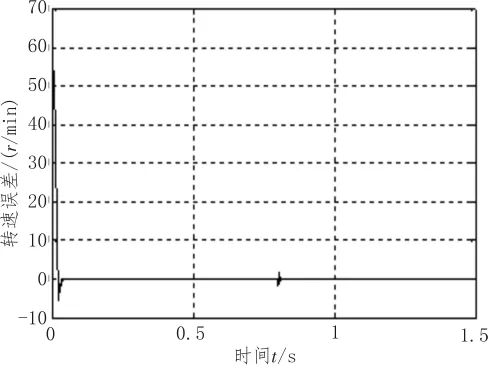
图4 转速跟踪误差
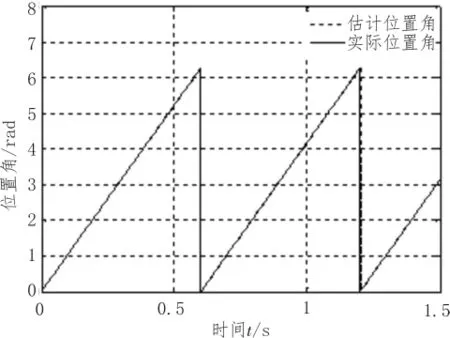
图5 位置跟踪
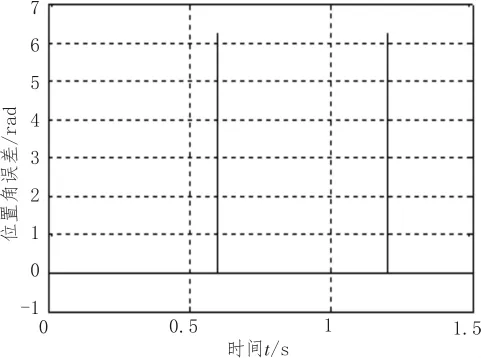
图6 位置跟踪误差
从图3~图6可以看出,刚开始系统经过很短时间就跟踪上了给定转速,之后除了转矩突变时转速有一些波动,但马上又稳定下来,其它时间转速跟踪良好,转速误差几乎为零;同时位置角也能较好跟踪,位置跟踪误差趋近于零,系统跟踪性能和稳定性能良好。通过上图可知,系统实现了无传感器的速度和位置跟踪并且取得较好的效果。
4 结 论
本文中的高频信号注入法的无传感器控制研究,通过跟踪转子的凸极,采用各种滤波器和滤波方法从高频载波信号中解调出实际的转子速度和位置信息,仿真结果表明了在低速条件下,高频信号注入法无传感器控制的有效性。无传感器控制的研究目前正处于发展和完善阶段,较适合工程实际应用。航空飞机在恶劣条件下,发动机可能突然变速变载,这种方法对电机参数变换不敏感,有较强的鲁棒性,在航空飞机的起动发电系统中有重要应用价值。
[1]周波.飞机电源系统的现状与发展[J].国际航空,2011(3):46.
[2]戴卫力,王慧贞,严仰光,等.航空起动/发电系统的发展趋势与研究现状 [J].航空科学技术,2010(5):28.
[3]张新伟,骆光照,马升潘,等.一体化起动/发电机起动控制器设计[J].微特电机,2013,41(1):35.
[4]葛红岩.电动汽车用永磁同步电机设计及其控制系统研究[D].哈尔滨:哈尔滨理工大学,2015.
[5]高越.基于高频信号注入法的永磁同步电机无传感器控制研究[D].兰州:兰州交通大学,2014.
[6]何国星.基于DSP和滑模观测器的PMSM控制系统研究[D].武汉:武汉理工大学,2010.
[7]张辰,何平,杜少华.永磁同步电动机无传感器控制方法综述[J].制造技术与机床,2012(11):44-48.
[8]韩飞飞.无速度传感器的永磁同步电动机调速控制[D].济南:济南大学,2015.
[9]郝磊.基于自适应的永磁同步电机无位置传感器控制系统研究[D].鞍山:辽宁科技大学,2013.
[10]廖军,张兴,杨淑英,等.改进高频信号注入法的IPMSM转子位置检测研究[J].合肥工业大学学报:自然科学版,2010,33(8):1161-1165.
[11]郭晓蒙.永磁同步电机无速度传感器矢量控制技术的研究[D].长沙:湖南大学,2014.
[12]尹文杰.永磁同步电机无位置检测器的自抗扰控制算法研究[D].上海:华东理工大学,2010.
[13]王正林,郭阳宽.Matlab/Simulink与过程控制系统仿真[M].北京:电子工业出版社,2012.
[14]盛正印.航空高压直流电源系统永磁同步电机起动/发电技术研究[D].烟台:海军航空工程学院,2013.
[15]曾庆贵.锁相环集成电路原理与应用[M].上海:上海科学技术出版社,2012.
Research on sensorless control of the electric operation of the air starting and powering generation system
LI Yan1, WU Di2,LI Yun3
(1.Department of Control Engineer, Naval Aeronautical Engineering Institute, Yantai264001,China;2.Graduate Management Group, Naval Aeronautical Engineering Institute, Yantai264001,China;3.The Navy's Military Representation Office in Guiyang, Anshun561000,China)
TN081
A
1674-6236(2017)19-0118-04
2016-07-27稿件编号201607192
李 岩(1967—),女,山东淄博人,硕士,教授。研究方向:航空电源系统与电气控制技术。