一种新的货运列车车号定位方法
2017-10-12王剑山西医科大学汾阳学院汾阳032200
王剑(山西医科大学 汾阳学院, 汾阳 032200)
一种新的货运列车车号定位方法
王剑
(山西医科大学 汾阳学院, 汾阳 032200)
货运列车车号定位是车号识别的关键步骤,在铁路货运物流管理方面有重要意义。为了适应室外复杂环境下的货运列车车号定位,对图像进行了图像增强处理,进行了二值化。对二值图进行形态学处理和连通域滤波,获得车号候选区域,利用水平投影法和连通域分析定位各块车号的大致位置,采用扫描线精确定位每部分车号。实验结果表明,对于不同的车型是鲁棒的,并且定位的准确率达到97%以上,基本满足了实际应用的需要。
货运列车; 车号定位; 车号识别
Abstract: Freight train license location is the key step in the train license identification, and has important significance in railway freight logistics management. In order to meet the complex outdoor environment of freight train license, firstly, image was enhanced, then binarized. Secondly, in order to get the train license candidate regions, morphological processing and connected domain filtering were used and horizontal projection and connected domain analysis were used to find train license general location of various pieces. Lastly, scanning line was used to accurately locate each part of the train license. The experimental results are robust to different models, and positioning accuracy is more than 97%. It basically meets the need of the practical application.
Keywords: Freight train; License position; License identification
0 引言
铁路货物运输是现代运输的主要方式之一,而货运列车车厢上的车号信息,作为车厢的唯一标识,在铁路运输过程中起着举重轻重的作用[1]。现阶段,大多数的铁路运输站使用无线射频技术来记录车厢信息,该技术具有识别准确率高,全天候工作,不受光照等客观条件影响的优点,但是,此方法的一个最大缺点是随着使用时间的长久化,车厢底部的标签会被污损甚至自动脱落,这使得人工维护起来非常的耗时耗力。
随着数字图像处理技术的不断发展,人们开始探索以数字图像处理技术为主的视频识别技术,货运列车车号定位也成为了研究热点,至今,人们的探索已经初见成效,收货了一些可借鉴的方法,但是,目前的方法受室外复杂光照条件和各类环境因素的影响,车号定位的鲁棒性欠佳,而且准确率还有待进一步的提高[2]。
本文借鉴已有的研究,针对车号定位过程中面临的一系列难点,譬如,不同光照条件下的图像增强问题、背景较为复杂时的图像二值化问题和车号区域规格不统一等,利用数字图像处理相关知识,挖掘车号区域的形状、位置、几何以及纹理等特征,探索和研究车号自动定位的技术和方法。本文的车号定位技术着眼于不同车型的鲁棒性和定位的准确率,实验表明,该方法能够满足实际中的应用需求。
1 算法总体设计
铁路货车车号定位是车号识别的前提,为了保证车号识别的准确率,必须准确定位好车号的位置,将车号进行提取。在实际的车号识别过程中,图像的采集过程是在室外条件下进行的,这样采集到的图像就存在光照不均,阴影以及噪声的影响,如果不考虑到这些因素直接去进行车号定位与识别,那么识别率会受到很大的影响。因此设计了如下的一系列车号定位方法。
(1) 为了提高车号字符与车厢皮的对比度,对车厢图像进行了幂次变换;为了压制图像中存在的光照不均、阴影和噪声,采用了同态滤波和中值滤波对车厢图像进行增强[3]。
(2) 针对从车厢图像中提取车号候选区域的问题,提出了一种车厢图像的综合二值化和连通域滤波方法。首先选择多个结构元素分别对图像进行顶帽变换和二值化,以获得多幅二值图,再通过加权融合得到最终的二值图,接下来对二值图进行形态学处理[4],以将连通域集结成块区,最后根据车号字块的先验知识,提取并分析块区的连通域特征,进而去除非车号区域,保留车号区域。
(3) 针对从连通域滤波后的车厢图像中定位车号区域的问题,提出了适用于货运列车车号区域的粗精组合的定位算法。首先,结合车号区域的位置和形状特征,并利用水平投影和连通域分析实现了各个车号小区域的粗(初步)定位;然后,利用扫描线算法结合车号字符的纹理和边缘特征,实现小区域的精确定位。
(4) 为了评价本文算法的定位准确率,设计了实验,并对车号定位准确度的进行了评价。
2 关键模块设计
2.1 图像预处理
基于实际情况的调研和图像处理的研究,设计了一个车厢图像预处理流程,如图1所示。
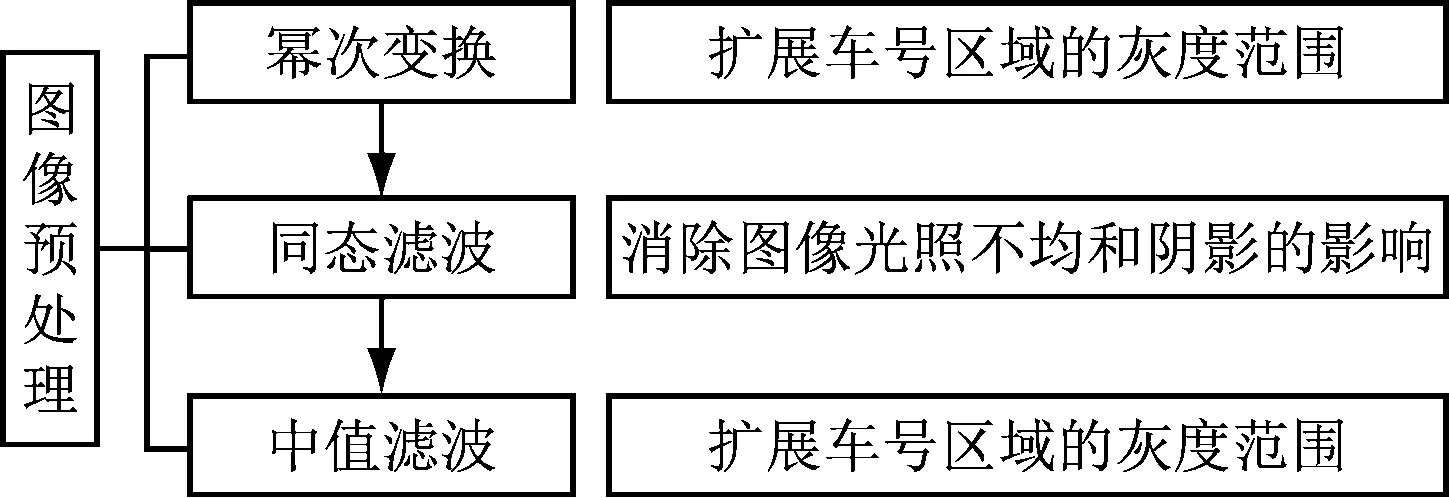
图1 图像预处理流程图
(1) 用幂次变换提高字符和背景的对比度。有些车厢的车号字符与车厢背景之间的对比度不明显,给车号区域的定位带来不便,采用幂次变换提高车号字符和车厢背景之间的对比度。
(2) 用同态滤波抑制光照不均和阴影影响。野外环境下拍摄的车厢图像有时存在的阴影、反光等光照不均现象,不利于车号区域的定位,采用同态滤波消除图像中存在的光照不均并减弱阴影的影响。
(3) 用中值滤波压制噪声点。车厢图像在采集和传输中,往往受到噪声的干扰,利用中值滤波降低图像中的噪声点。
利用以上的预处理方法对车厢图像进行预处理。结果如图2所示。
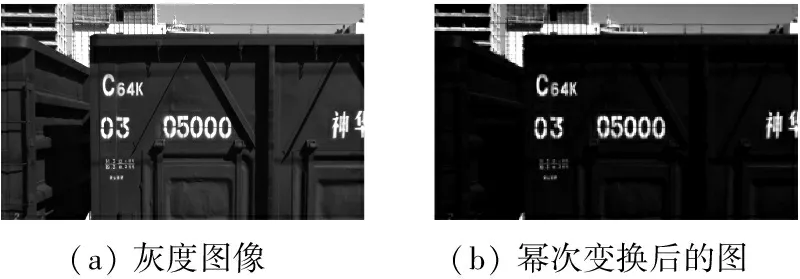
(a)灰度图像(b)幂次变换后的图

(c)同态滤波后的图(d)中值滤波后的图
图2 图像预处理示例
可见,经过预处理,图像中的噪声点减少了,车厢图像中的车号字符和车厢背景之间的对比度有了很大提高,而且,图像的细节保留得很好。
2.2 连通域滤波
(1) 车厢图像大多存在复杂的背景,直接二值化图像效果欠佳,采用顶帽变化可以使背景变得简单均匀,但是顶帽变化需要选择合适的结构算子。然而,列车车厢号的印刷没有严格统一的规范,车号字符的笔画宽度、字符间距、字符高度和宽度存在一定差异,这是导致适合不同车厢图像的结构算子也不相同。结构算子尺寸较小时,导致车号作为背景被抹掉,相反,则使更多的背景保留下来,使得背景抑制效果降低。因此,提出了二值图的加权融合算法。具体的算法如下[5]:
第一步:选用尺寸大小D为2、4和6的圆形结构算子分别对车厢图像进行顶帽变换和二值化,得到三幅二值图(BW1、BW2和BW3)。另外,为了增加二值化的鲁棒性,补偿经顶帽处理可能造成的车号缺失,再将车厢图像直接利用Otsu算法二值化,得到二值图BW0。
第二步:将四幅二值图BW0、BW1、BW2和BW3,按照公式(1)进行加权融合,得到灰度图BW,如式(1)。
BW=BW0*w0+BW1*w1+BW2*w2+BW3*w3
(1)
其中,加权系数的取值为:w0=w1=0.2,w2=w3=0.4。
第三步:依据公式(2)把BW的灰度范围线性扩展到[0,1]区间,如式(2)。
BW=[BW-min(BW)]/[max(BW)-min(BW)]
(2)
第四步:根据公式(3)阈值T取为0.4将图像BW二值化,至此,得到融合的二值图,如式(3)。

(3)
根据以上二值化过程,图像二值化流程如图3所示。
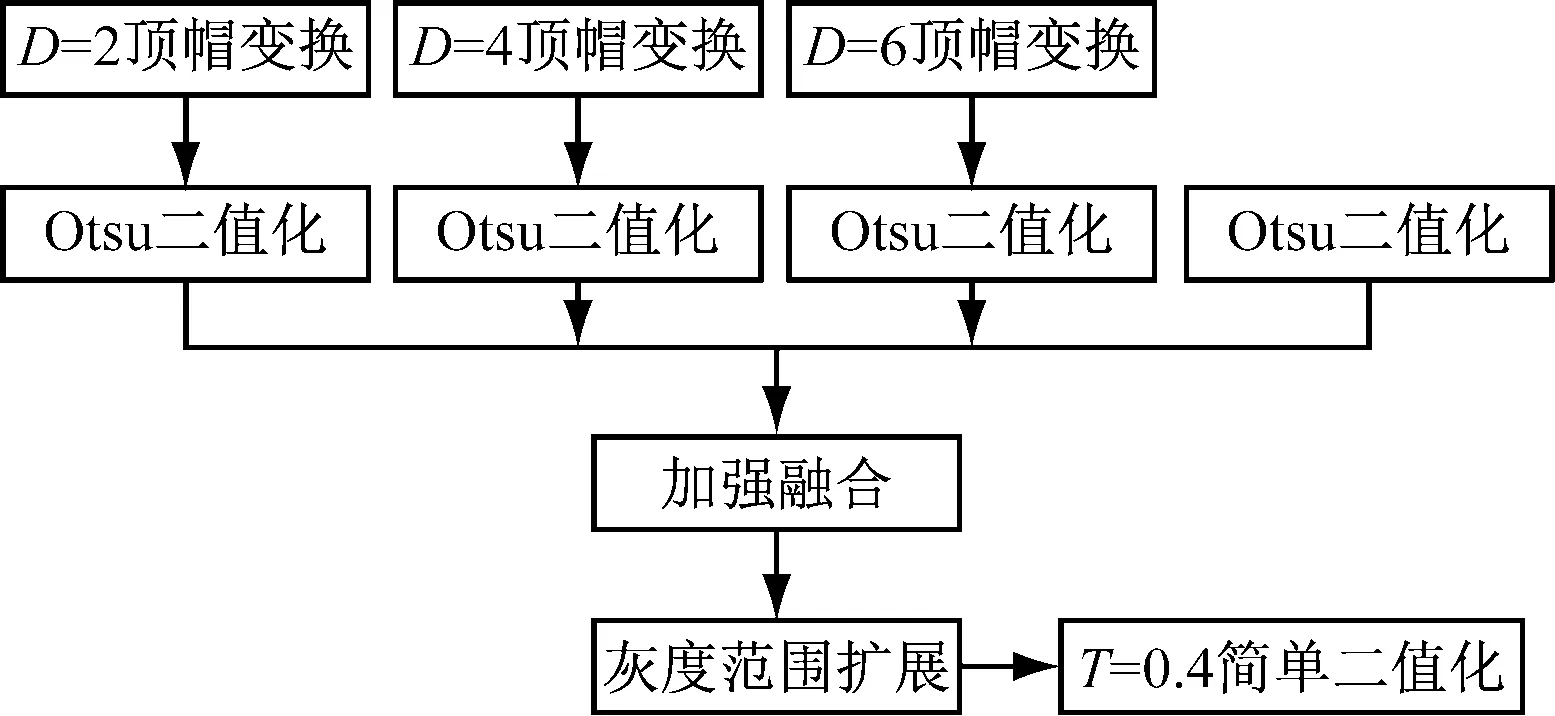
图3 基于顶帽变换的二值化流程图
(2) 经过二值化处理的车厢图像往往包含车号字符连通域和干扰连通域,因此采用连通域分析的方法提取车号候选区域。由于车号字符没有统一的喷绘规格,字符存在粘连和断裂现象,并且字符间距大小不等,为了屏蔽这些差异,首先对车厢二值图像中的前景像素点进行形态学处理,将字符区域集结成块,然后标记图像中的连通区域,提取连通区域的特征,再结合先验知识,对图像进行连通域滤波。连通域滤波方法的流程图如图4所示。

图4 图像连通域滤波流程图
采用以上的预处理和连通域滤波处理三种主要车型(即C64K、C70A和C80)的车厢图像,如图5~图7所示。
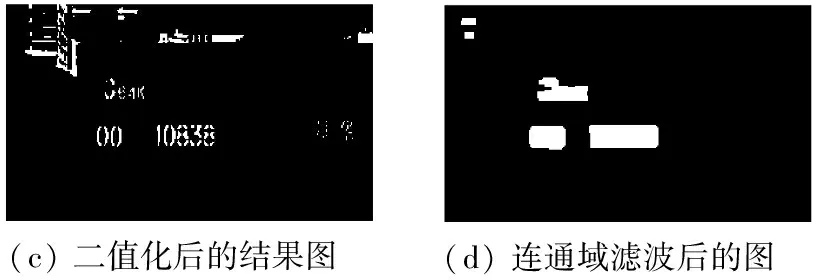
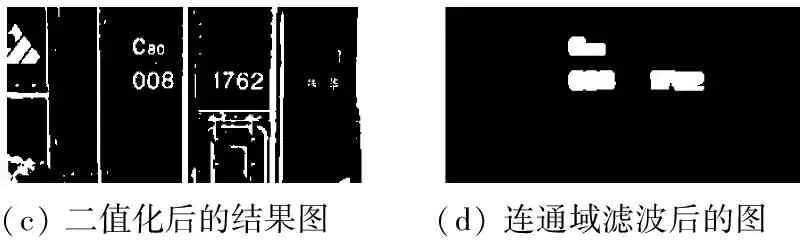
由图5、图6和图7可见,车厢图像经过预处理和连通域滤波后,得到只包含少数白块的车厢二值图,极大地方便了车厢号区域的定位。同时,这也说明,本文的预处理和连通域滤波方法对于不同车型的车厢图像是鲁棒的。
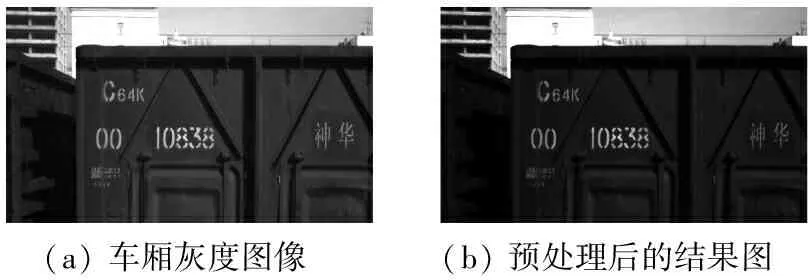
(a)车厢灰度图像(b)预处理后的结果图
(c)二值化后的结果图(d)连通域滤波后的图
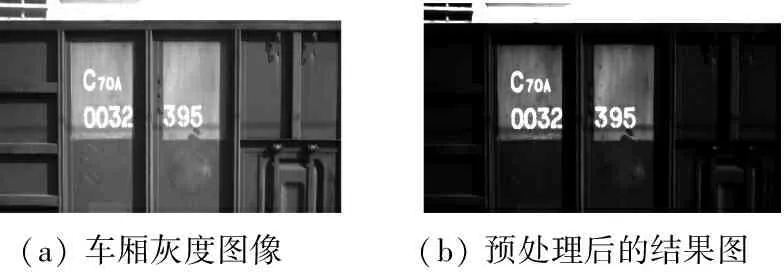
图5 C64K车厢预处理和连通域滤波示例图
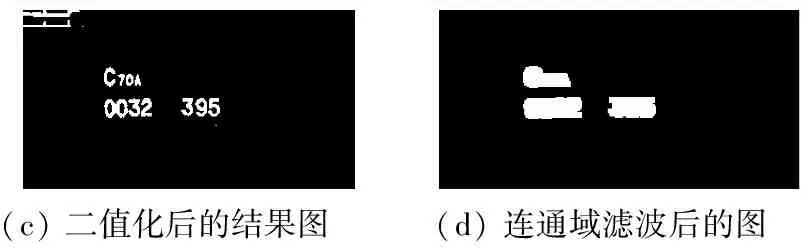
(c)二值化后的结果图(d)连通域滤波后的图
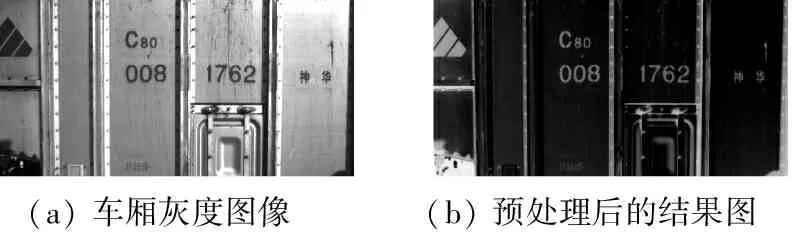
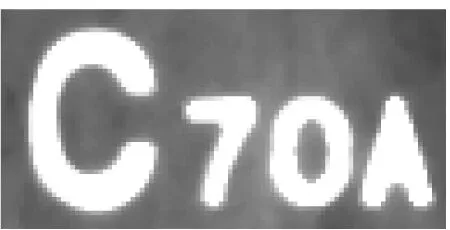
图6 C70A车厢预处理和连通域滤波示例图
(c)二值化后的结果图(d)连通域滤波后的图
图7 C80车厢预处理和连通域滤波示例
3 车号区域定位
车厢图像经过连通域滤波得到的白色块,不仅包含车厢号的粗略区域,也包含某些非车号区域,还可能含有许多干扰像素,它还不能精确指示车型、车箱号的外边界。关于车号区域定位的主要研究内容是通过分析连通域滤波后的二值图,初步获得车号区域的边框位置和车号子图,然后去除车号子图中的干扰像素,精确定位出车号区域。该部分是列车车号定位的关键内容,最终得到的车号区域应包含全部车号字符,并且包含尽可能得少的噪声像素[6-7]。
3.1 车号区域初步定位
车厢二值图经连通域滤波后往往包含非车号区域,本文结合车号区域的特征,采用水平投影和连通域分析的方法从中定位每部分车号区域,如图8所示。

图8 初步定位
(1) 水平投影
专有知识成员比例被定义为CPIKN中专有知识成员数量占CPIKN成员总数量的比例。进一步,专有知识成员比例
由于滤波后二值图中的车型号和车厢号区域在水平方向具有较多的白色像素,水平投影后,车型号和车厢号区域对应两个波峰,而且波峰宽度基本相同,并且峰顶位置在一定的距离范围之内。因而,对连通域滤波后的二值图进行水平投影,保留在一定距离和宽度范围内的水平波峰组合,即可得到可能包含两行车号的波峰组合[6,8]。
(2) 连通域分析
以上的水平投影只能描述车号区域所在的行,并不能准确描述每块车号的具体位置。需要结合车号区域的先验知识,对每组波峰的左右边界(即二值图中可能包含车号区域的上下边界)之间的连通域进行分析。
车号区域有一定的印刷规范,即车型号位于上一行,车厢号两部分位于下一行且水平对齐,车型号和左半部分的车厢号左边框基本对齐,3块区域高度基本相同,中心之间满足一定的距离范围,两行车号有一定的水平间距。
结合以上3块车号的先验知识,考查相应连通域的高度、宽度、长宽比和中心位置等是否满足预设的比例或范围,直至得到可能包含车厢号和车型号的车号区域。通常情况下,车厢号和车型号区域位于水平投影的最大峰和次大峰处。至此,可以得到车号区域图像和每部分车号区域的位置[9]。
3.2 扫描线精确定位技术
初步定位后的车厢图像大多存在较宽的边缘和噪声点,为了获得更怯准确的车号图像,本文首先采用Canny算法提取每部分车号图像的边缘信息,然后按行扫描边缘图像中的跳变点并统计其信息,最后,分析扫描行的跳变点信息,缩紧车号图像的边框,实现精确定位,其流程,如图9所示。

图9 精确定位
第一步,采用Canny算子检测车号子图像的边缘,并将边缘图二值化。
第二步,对边缘二值图按行扫描,统计在一定距离范围(车厢号小于等于30个像素,车厢号小于等于60个像素)的跳变点个数、首尾跳变点所在的列坐标以及跳变点之间的间距和。每个扫描行的跳变点个数与间距和必须满足一定的范围(跳变点大于1个且小于等于60个,间距和大于子图像宽度的1/10且小于等于子图像宽度),舍弃不符合要求的扫描行,合并相邻的扫描行,然后保留连续行数在[20, 45]之间的扫描行。
第三步,由于车号字符印刷时本身存在一定的间隙,需要合并上一步得到的连续扫描行间距小于等于5的扫描行。扫描行数在[35, 45]范围内,则完成一个车号子图像的定位。
第四步,重复以上过程,直到完成3个子图像定位。
利用以上的车号定位方法对三种主要车型(即C64K、C70A和C80)的车厢图像进行了车号定位实验,结果如图10、图11和图12所示。
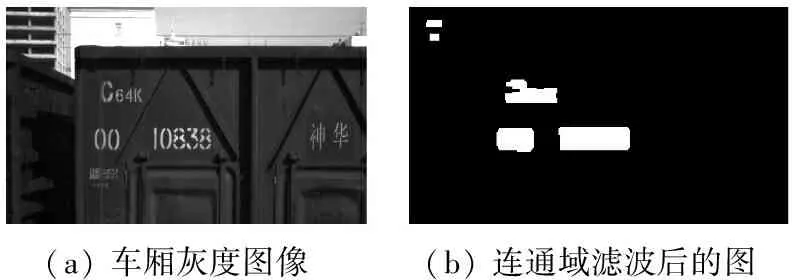
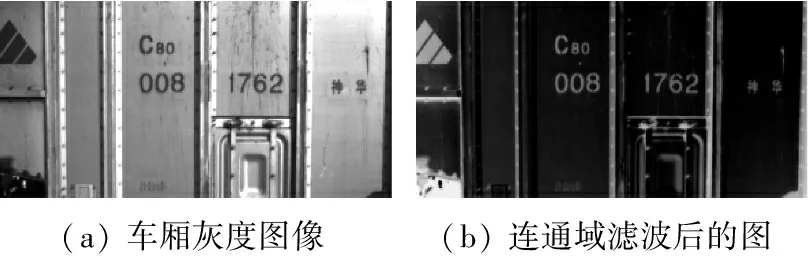
(a)车厢灰度图像(b)连通域滤波后的图

(c) 图(a)经初步定位后得到的车号子图,从左到右依次为:车型号子图、左车号子图和有车号子图

(a)车厢灰度图像(b)连通域滤波后的图
(c) 图(a)经初步定位后得到的车号子图,从左到右依次为:车型号子图、左车号子图和有车号子图
由图10、图11和图12可见,对于连通域滤波后的车厢二值图,采用本文的定位方法能够准确的定位出车厢图中的车号区域。同时,这也表明,本文的车号定位方法对于不同车型的车厢图像均适用。
4 实验结果
为了说明本文提出的一系列方法是有效的,做了以下的实验,实验结果如表1所示。
由表1可知3部分车号区域和整体车号区域的定位准确率基本相同,均达到了97%以上,但存在一定的差异。具体表现为以下3点:
(a)车厢灰度图像(b)连通域滤波后的图

(c) 图(a)经初步定位后得到的车号子图,从左到右依次为:车型号子图、左车号子图和有车号子图

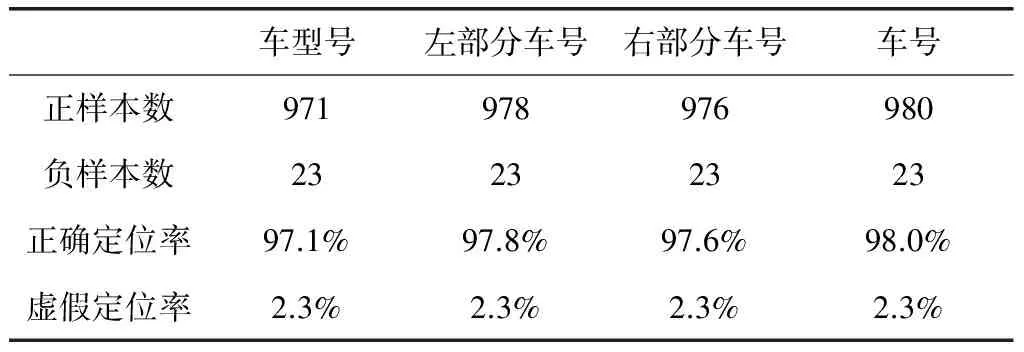
表1 车号定位实验结果
(1) 车型号区域的定位准确率最低,分析原因:一方面,车型号部分的字体高度不完全一致,在定位过程中的形态学连通域处理后,得到的白块不够完整;另一方面,车型号区域位于车厢号上方,但水平位置不固定,在结合位置信息和连通域分析定位时,得到的车型号区域的位置存在偏差。
(2) 左部分和右部分车号区域的高度基本相同,上下边界基本一致,因而定位的准确率几乎相等。
(3) 整个车号区域的准确率较高,这是由于整个车号区域在三块区域之间包含一些干扰的区域,考虑整个区域的位置时,这些干扰区域不必去除,使得定位容易一些。
综上所述,本文提出的铁路货运列车车号对于不同的车型是鲁棒的,并且定位的准确率达到97%以上,基本满足了实际应用的需要。
5 总结
分析了铁路货运列车车号的特点和定位过程中面临的难点,并针对这些特点和难点提出了一系列的解决方案,首先完成图像的预处理,车厢图像经过预处理,不仅噪声点减少了,而且车号字符和车厢背景之间的对比度提高了,还很好的保留了图像的细节信息,为后续处理奠定了基础。其次利用综合二值化与连通域滤波方法检测车号候选区域。最后利用精确扫描法准确定位车号区域。并通过实验结果说明,本文提出的方法是确实可行的,定位率达到了97%以上。
[1] 王晓锋,马钟. 基于卷积神经网络LeNet-5的货运列车车号识别研究[J]. 现代电子技术,2016,(13):63-66+71.
[2] 程达文. 基于动态信息集成的铁路调度指挥系统研究[D].成都:西南交通大学,2015.
[3] Al-amri S S, Kalyankar N V, Khamitkar S D.Linear and non-linear contrast enhancement image[J]. Int. J. Comput. Sci. Network Security, 2010, 10(2): 139-143.
[4] 鲁昌华, 刘玉娜. 基于同态滤波和改进形态学的图像边缘检测[J].仪器仪表学报, 2011, 32(6): 74-78.
[5] Abolghasemi V, Ahmadyfard A. Local Enhancement of Car Image for License Plate Detection[C]. 15th European Signal Processing Conference (EUSIPCO). 2007: 2179-2183.
[6] 顾胜兰. 自然场景下的文本定位与提取[D]. 上海:上海交通大学, 2008.
[7] 朱成军, 蒲菊华. 基于Tophat变换和文字纹理的车牌定位算法[J]. 北京航空航天大学学报, 2008, 34(5): 541-545.
[8] 任俊明. 铁路车号识别系统数据的自动化采集[J]. 电脑迷,2016,(04):30.
[9] Kai-Hsiang Lin, Hao Tang, Thomas S. Huang. Robust License Plate Detection Using Image Saliency[C]. Proceedings of 2010 IEEE 17th International Conference on Image Processing, 2010: 3945-3948.
ANewMethodofFreightTrainLicenseLocation
Wang Jian
(FengYang College, Shanxi Medical University, Fenyang 032200, China)
TP391
A
2017.04.25)
山西医科大学汾阳学院人才引进科研启动基金的支持(2016D01)
王剑(1988-),男,山西省汾阳市,工学硕士,助教,研究方向:图像处理、视线跟踪。
1007-757X(2017)09-0032-04
