差分法及前方交会在悬索桥基准索精确定位中的实践
2017-10-12,
,
(湖南路桥建设集团有限责任公司, 湖南 长沙 410004)
差分法及前方交会在悬索桥基准索精确定位中的实践
马林,石柱
(湖南路桥建设集团有限责任公司, 湖南 长沙 410004)
大岳高速洞庭湖大桥周边紧邻化工厂、氮肥厂及繁忙的河道,致使测量通视条件极差,给主桥基准索精密测量的实施带来极大困难。结合在实际生产中采用的差分法及前方交会法,有效解决了因气象条件变化异常而无法快速、精准进行主缆基准索测量的难题,为施工的顺利进行提供了有力的保证。
悬索桥; 基准索; 差分; 前方交会
0 引言
主缆被视为悬索桥的生命线,主缆基准索的定位准确性直接影响到悬索桥受力体系能否与设计模型吻合及桥梁后期运营的整体安全性,是悬索桥施工测量中的关键工作。在现有测量仪器条件下,基准索测量方法一般为采用单向三角高程。大气折光是制约三角高程测量精度的关键因素,由于桥位区地形条件复杂,大气折光改正数难以准确测定。同时这种异常气象条件对精密测距的实施也带来极大难度,如何快速、精确测量两岸索塔实时里程成为基准索实时理论高程计算准确性的关键因素。
大岳高速洞庭湖大桥是大岳高速的控制性工程,桥位位于洞庭湖入长江交汇口处岳阳市七里山,东起岳阳,西接君山,跨越湘江河道。桥跨布置为3×60 m悬浇钢构+(1480+453.6)m双塔双跨钢桁梁悬索桥+(32.58+3×60.5)m悬浇连续梁。桥位区化工厂较多、桥位处湘江河道挖沙船只十分密集、君山侧芦苇生长茂盛,导致桥位区所处位置雾霾非常严重,常年能见度极差,主缆中跨跨中点距离两岸控制点距离分别达0.8、1.1 km,对精密单向三角高程测量及精密测距的实施带来极大难度。
本文对采用多测站前方交会法对主缆精度定位,综合考虑地理环境、现有设备及监控要求,提出了针对此条件下大跨度悬索桥在传统测量方法上加以改进和优化,采用前方交会法实现了对主缆各施工阶段的精确高程定位,采用差分法对实时跨度的精确测量,在实践中验证了其可靠性和可行性。
1 两岸高程控制网的建立
1.1 高精度跨河水准的实施
由于君山岸近5 km范围内均为洞庭湖河滩,不宜设置水准基点。两岸水准基点设置在位于岳阳岸房屋基角处的BM01,为了验证该点的稳定性,在位于该点东南侧、东侧约2 km处的洞氮生活区及滨湖学校内分别设置2个水准检测点,通过精密陆地几何水准对水准基点进行检测,再跨河水准联测至君山岸。
由于湖区测量气象条件较差,能够利用的有效观测时间较短,跨河水准测量采用“测距三角高程法”[1],跨河点选择在岳阳岸的桥位处大堤与君山岸河滩上,跨河视线长度为1.35 km,两岸各设置1个观测墩,在该两点距离约10 m处地面再以扩大基础埋设2个地面跨河点,组成大地四边形,见图1。观测仪器采用2台Leica TS30全站仪以自动寻标、记录的方式两岸同步对向观测12个双测回,以精密陆地几何水准分别将两岸跨河点联测至本岸水准基点。
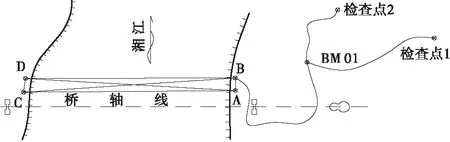
图1 跨河水准测量示意图
根据跨河水准图形,组成的闭合环共有5个,闭合差分别为ABC(+5.6 mm)、ABD(+5.2 mm)、ACD(+0.4 mm)、BCD(+5.0 mm)、ABCD(-5.6 mm),环闭合差限差计算公式见式(1):

(1)
计算限差为±13.9 mm,满足二等跨河水准测量精度。
跨河水准4条往返路线、12个测回的较差分别为52、52、49、55 mm,根据规范要求,各测回的互差限差按式 (2)计算:

(2)
计算限差为±24.1 mm,超出规范规定的限差要求。在实际工作中多次增加测回数仍出现测回间互差超限情况,分析主要是由于测区基本为雾霾较为严重天气而导致大气折光出现不均匀异常变化,出现因时间跨度较大(共计观测18 d)出现明显分群现象,因此才会出现环闭合差远小于规范限差的现象,根据规范要求,在环闭合差合格的情况下允许该误差的存在,处理方式为取其算术平均值再进行严密平差计算。同时计算GPS跨河水准拟合高程与三角跨河高差之差为8 mm,说明只要经过足够的多余观测、严格同步测量,在极端恶劣通视条件下依然可以实现高精度跨河水准测量[2]。
1.2 控制点稳定性的检验与偏位纠正
根据测绘部门历年对附近国家水准点的监测显示存在不均匀下沉现象,在岳阳岸施工项目部四层办公楼基角处埋设水准基点,分别在距离基点约2 km东南侧洞氮生活区及东侧小学房屋基角处埋设水准检核点,通过精密陆地几何水准的联测,能够及时、快速、有效地修正水准基点的沉降量。
2 基于三角高程测量的主缆测量
2.1 实时跨度测量
边、中跨跨度的测量工作贯穿整个上构施工直至全桥合龙,跨度测量即两岸索塔顶部里程实时测量。若采用两岸控制点分别测量各自索塔顶部预埋棱镜,由于控制点间误差、短边大高差测量误差较大等因素,难以达到监控要求的3 mm精度要求。
采用2个测站同步对索塔顶预埋棱镜进行测量,岳阳岸索塔测量在NT01点直接进行观测,该点位于楼顶,与塔顶仰角为18°,采用极坐标法直接测量。
在岳阳岸索塔北侧大堤外侧埋设观测墩,直接测量君山岸索塔顶部预埋棱镜,同时在两岸索塔塔座上方埋设棱镜,采用差分法同步测量索塔底、顶棱镜点边长,初始边长在第1次塔锚联测时进行,在3个时段(均为夜间)同步对岳阳岸索塔、君山岸索塔测量作为差分的初始值。由于测站点位于过往重型车辆较多的大堤上,在垂直于大堤的岳阳岸下游侧索塔底部埋设棱镜,每次实测边长,作为测站点稳定性修正依据。后期各次测量同步观测岳阳岸索塔底部、君山岸索塔底部及顶部棱镜,通过岳阳岸棱镜对测站稳定性进行实时修正,通过君山岸索塔底部实时边长与初始边长之差值,与君山岸索塔顶部实时边长进行差分,能够最大程度抵消因大气异常变化引起长距离测量误差。结合塔锚联测时的索鞍初始位置,直接解算出两岸索塔实时里程。如图2。

图2 差分法索塔跨度测量示意图
在进行实时跨度测量的同时需要测量塔顶实时高程,按照常规三角高程难以满足监控计算精度要求。在两岸索塔承台上预埋棱镜,通过陆地几何水准与三角高程相结合的方法测量出预埋棱镜的高程,分别置仪于NT01、DT6,以中间法三角高程差测量索塔顶预埋棱镜,差分计算出塔顶实时高程,能够最大程度减弱大气折光对三角高程的影响。大岳高速洞庭湖大桥主缆基准索调整、稳定观测期间测站至基准点(索塔底座)、索塔顶的平距观测值见表1。
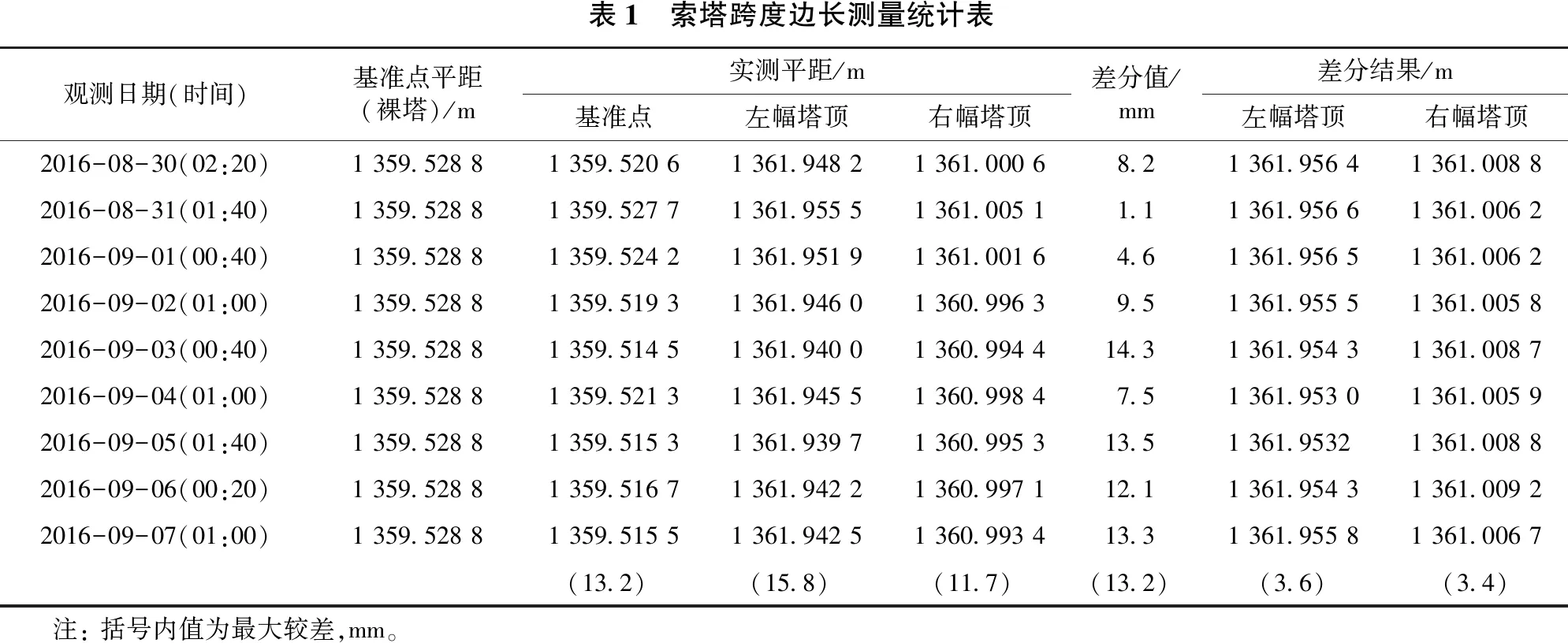
表1 索塔跨度边长测量统计表观测日期(时间)基准点平距(裸塔)/m实测平距/m基准点左幅塔顶右幅塔顶差分值/mm差分结果/m左幅塔顶右幅塔顶2016-08-30(02:20)135952881359520613619482136100068213619564136100882016-08-31(01:40)135952881359527713619555136100511113619566136100622016-09-01(00:40)135952881359524213619519136100164613619565136100622016-09-02(01:00)135952881359519313619460136099639513619555136100582016-09-03(00:40)1359528813595145136194001360994414313619543136100872016-09-04(01:00)135952881359521313619455136099847513619530136100592016-09-05(01:40)1359528813595153136193971360995313513619532136100882016-09-06(00:20)1359528813595167136194221360997112113619543136100922016-09-07(01:00)135952881359515513619425136099341331361955813610067(132)(158)(117)(132)(36)(34) 注:括号内值为最大较差,mm。
2.2 基准索定位测量
2.2.1 实时大气折光测量
因大气折光系数随气候、时间、地区等因素变化而不同,即使精确测定了某一测线折光系数,但随着时间和测线穿越地物的不同也会无规律的变化[4],成为制约三角高程测量精度的最关键因素。大气折光的测量方法主要有单向和对向三角高程测量,两岸边跨跨中大气折光采用单向三角高程测量,中跨跨中采用对向三角高程测量。在基准索测量前1 h测量大气折光,如图3,同步在NT01、DT6架设全站仪(Leica TS30),往返测量NT01~DT6斜距及天顶距,差分法量取仪高、觇高,计算实时大气折光。岳阳岸以NT01-NT04、君山岸以DT6~DT4进行单向测量,按式(3)计算大气折光k值。
(3)
式中:s为观测斜距;i为仪器高;l为觇高;α为垂直角;R为观测处曲率半径。
NT01-NT06测线距离中跨跨中垂距约为150 m,岳阳岸测线与边跨跨中测线基本重合,君山岸测线距离边跨跨中垂距约为50 m,基本能够替代各测站至跨中点大气折光。
2.2.2 基准索单向三角高程测量
图3 基准索测量示意图

图4 精加工卡环
基准索定位测量含左、右幅的边、中跨跨中点共计6个测点,采用3台Leica TS30全站仪,如图3,中跨跨中点在NT01、DT6三站进行同步测量,DT7为检核测量站,其中NT01兼顾观测岳阳岸边跨跨中及岳阳岸索塔偏位,DT6兼顾观测君山岸边跨跨中。采用精加工卡环(见图4),固定于跨中位置,分别观测卡环上、下棱镜斜距、天顶距。中跨跨中处的实时里程根据实测距离、测站至基准索实际垂距几何算得。边跨跨中实时里程由于线性垂度较大原因需要精密测量,NT01以NT02、DT6以DQ23为定向点同步测量水平角、斜距、天顶距。现场观测数据均自动记录于仪器内部,现场通过计算机导出后传回位于岳阳岸的总部统一计算。加入大气折光k值改正后的待测点高程计算方法如式(4):
H镜=H测+s·sinα+i+
(4)
式中:s为观测斜距;α为垂直角;i为仪器高;k为大气折光值;R为观测处曲率半径,按式(5)求出:
(5)
式中:C为光速;e′为扁率;B为纬度。
基准索的计算包括各跨中点里程和标高、索塔实时里程、塔顶实时高程3个项目。以上3项同步计算是一项极其繁琐、复杂的工作,需要测量人员提前充分考虑现场实际情况,提前在电子表格编制计算程序,每个测量数据需进行测距加乘常数、测距边投影及大气折光改正,在索塔实时里程的计算中,需要同时顾及裸塔状态的主、散索鞍定位值与索塔预埋棱镜的相对关系。需要特别注意的是,监控单位计算的建模高程投影面应与测量计算所提供的投影面取值一致(大岳高速洞庭湖大桥建模高程面为索塔顶),大岳高速公路洞庭湖大桥主缆基准索稳定观测成果见表2。
基准索调整到位后需进行3 d的稳定观测,大岳高速洞庭湖大桥主缆基准索稳定观测左、右幅索股相对高差中跨最大差值为9 mm,满足要求。
表2 主缆基准索稳定观测成果表(中跨跨中)测量日期位置实测里程/m实测高程/m理论高程/m绝对高差/mm相对高差/mm2016-09-05左幅53815.492105.799105.814-153右幅53815.466105.720105.738-182016-09-06左幅53815.442105.886105.88429右幅53815.398105.800105.807-72016-09-07左幅53815.416105.885105.88413右幅53815.399105.801105.803-2
3 结论
采用差分法测量固定的长距离,通过初始精准测量,能够有效抵消绝大部分因气象变化带来的长边测量误差。大气折光是制约三角高程测量精度的关键因素,随时不断变化,尤其在洞庭湖区更难准确测量,大岳高速洞庭湖大桥主缆基准索定位测量通过多测站、沿测线方向测量大气折光,能够最大限度对三角高程进行大气折光改正提高测量精度。
从以上的分析中可以看出,使用本文提出的基于差分法及前方交会对悬索桥基准索精确定位的方法,完全能够克服了桥梁跨度大、气候条件恶劣等各种因素的影响,在实际的测量应用中,其测量结果也能够很好地满足施工的需求,在精度、效益、经济成本等方面都得到了很好的控制,能够为桥梁等恶劣条件下的精密测量实施提供一定参考依据。
[1] 梁振英,董鸿闻,姬恒炼.精密水准测量的理论和实践[M].北京:测绘出版社,2004.
[2] 吴迪军,熊伟,郑强.港珠澳大桥首级控制网复测方法研究[J].工程勘察,2011(9):74-78.
[3] 肖海威,秦亮军,刘洋.广州新光大桥变形监测控制网试验[J].工程勘察,2010(5):71-74.
1008-844X(2017)03-0161-04
U 448.25
A
2017-08-16
马 林(1980-),男,工程师,主要从事桥梁施工测量等精密测量工作。