一种自循迹小车循迹方案优化系统
2017-10-09陈思常峰何光普乐山师范学院物理与电子工程学院四川乐山614000
陈思,常峰,何光普(乐山师范学院物理与电子工程学院,四川乐山,614000)
一种自循迹小车循迹方案优化系统
陈思,常峰,何光普
(乐山师范学院物理与电子工程学院,四川乐山,614000)
自循迹小车沿不同特征的曲线轨道运行,运行轨迹直接决定了小车能否快捷到达目的地。本文以高清摄像头捕获小车运行坐标,再利用LabVIEW根据坐标数组绘制运行轨迹,根据背景差分法对比轨道图和实际小车运行轨迹图,实现快速获得当前曲线特征的轨道对应的PID控制参数。
自循迹小车;LabVIEW;背景差分法;PID
0 引言
自循迹智能小车是融汽车电子技术、传感器技术、计算机技术、机械技术以及控制和模式识别算法等为一体的现代产物。以智能车为研究对象的各种学科竞赛应运而生,研究和探索自循迹小车最优轨迹包含两个方面,一方面是研究控制算法,另一方面是调试过程中的方法和手段。两者各有偏重,又互相补充。本文以电磁传感智能小车为载体,设计了一个帮助研究者调试小车运行参数的系统,为探索最佳路径提供更好的依据。
1 系统总体设计
以电磁传感智能小车在一条中心铺设有引导线的赛道上运行为例,如图1所示,通过高清摄像头采集小车运动的多帧图片,建立数学模型,对小车目标进行轨迹跟踪,在上位机界面中绘制运动轨迹并与实际赛道进行对比,通过无线模块由上位机将PID参数值传输给下位机实时更新参数,通过PID参数调整实现运动轨迹最优化设置,以利于研究更好地小车循迹方案。

图1 自循迹小车循迹方案优化系统结构框图
该系统使用K60单片机为主控芯片的电磁传感器智能小车组成下位机,采用虚拟仪器技术开发软件LabVIEW设计上位机,并通过NRF24L01无线模块实现上位机和下位机的数据通信。
2 PID算法
PID算法是自循迹小车使用的最多的控制算法,控制小车的PWM输出,一是使小车运行速度稳定,二是使小车快速达到预期速度。在控制小车速度时,PID算法通过读出被控对象的当前速度值减去预期设定速度值构成偏差值,然后将将偏差值与比例(P)、积分(I)、微分(D)通过线性组合构成控制量进而对PWM输出进行控制。PID算法又分位置式和增量式,位置式PID的输出与过去的所有状态有关,所以小车控制多以位置式为主。公式如下:

如果要运用好这个公式,那么公式中KP、KI、KD必须自己一点一点的调出来,这个过程非常复制和繁琐,需要多次设置KP、KI、KD值,观察小车运行状态,检测小车运行时间,甚至在某段轨道上反复试验,以求最佳通过这段轨道的参数。本系统高清摄像头捕获的小车轨迹,在上位机上和原始轨道图像进行重合,提供给研究人员更加直观的小车状态。然后上位机通过无线模块把修订过的KP、KI、KD值快速回传给小车更新PID算法参数,研究人员可以快捷的进行下一次试验,提高了工作效率。
3 背景差分法
背景差分法是当前比较流行的目标检测方法,是静止背景下,运动目标识别最直接和最简单的一种方法[2],其原理是将当前图片与背景图片进行差分,提取并得到目标。
如果当前视频图像序列第t帧图像的坐标为It(x,y),该坐标的像素灰度值为I(x,y,t),对应的背景灰度值为B(x,y,t),那么作差分运算后得到的目标值为M(x,y,t),此时设定一阀值T,判断如果M(x,y,t)是当前与背景中灰度值相差较大的点,则记录下当前坐标It(x,y)并保存到坐标数组里。其示意图如图2所示。
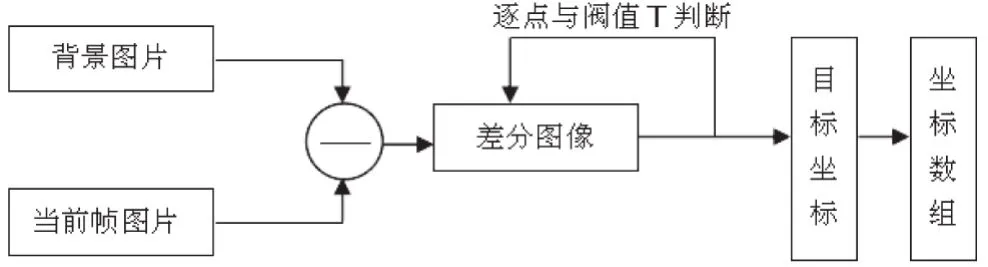
图2 背景差分法示意图
4 LABVIEW实现
LabVIEW中提供了强大的机器视觉模块IMAQVision,内含大量视觉开发函数库。其中NI公司推出的VAS(VisionAcquisitionSoftware)软件可以直接支持众多相机。本文使用NI-IMAQdx模块[3],首先调用IMAQdxOpenCameraVI打开函数打开相机,获得相机使用,同时加载摄像头的配置文件配置摄像头数据,之后调用SnapVI对赛道进行单帧连续采集,使用完成后调用IMAQdxCloseCameraVI关闭摄像头。LabVIEW还有一强大的功能就是可以采用MatlabScript节点进行导入并完成Matlab程序的编写,本系统利用MatlabScript节点将事先编写好的图像背景差分算法导入LabVIEW作为运算节点。图2中目标坐标建立坐标数组时,需要把时间因素考虑进去,这里将坐标作为一个元素,再加上时间元素构成一个二维簇数组。LabVIEW根据这个二维簇数组描绘出完整的小车运行轨迹,为了把小车实际运行轨迹图与背景轨道图相比较,只需在LabVIEW中运用两次“绘制平化像素图.VI”即可将两幅图合并在一副图中。
5 结语
本文介绍了一种可行的自循迹小车循迹方案优化系统,通过现代电子技术可以帮助研究者达到更加精确的路径分析和参数设定的目的,使智能循迹小车在循迹过程中的路径更加形象的展现在研究者面前,有利于更好地探索最佳路径及控制算法的研究。
[1]朱里红,王定文.基于模糊PID的电磁循迹小车控制系统[J].兵工自动化,2016(2):44-47.
[2]于成忠,朱骏,袁晓辉.基于背景差法的运动目标检测[J].东南大学学报(自然科学版),2005(s2):159-161.
A self tracking car tracking optimization system
Chen Si,Chang Feng,He Guangpu
(School of physics and electronic engineering, Leshan Normal University,Leshan Sichuan,614000)
Since the curve track tracking car along different characteristics of the operation, running directly determines the car can quickly reach the destination. In order to capture high-definition camera car running coordinates, then use LabVIEW array according to the coordinate drawing trajectory, according to background difference method to contrast the orbits and the actual car track map, PID control parameters to achieve rapid access to the current curve corresponding to the track.
self tracking car; LabVIEW; background subtraction; PID
常峰(通讯作者)(1980-),男,汉族,硕士,高级实验师,研究方向:电子测量技术及仪器、自动测试技术及系统集成。
2015年度四川省大学生创新创业训练计划项目(项目编号:201510649067)。
