基于OSPA距离和特征点采样的路标识别算法*
2017-10-09刘伟峰杨爱兰
陈 利,刘伟峰,杨爱兰
(杭州电子科技大学)
基于OSPA距离和特征点采样的路标识别算法*
陈 利,刘伟峰,杨爱兰
(杭州电子科技大学)
提出了一种基于最优次模式(OSPA)距离的路标识别算法.算法引入Markov随机场建立噪声的待检图像,然后采用条件迭代算法(ICM)恢复图像,进一步提取路标边缘点.这些边缘点作为特征点;该特征点看作为待检特征点集,计算其和标准路标库图像之间的OSPA的距离,以此来识别待检路标.分析表明,该算法对于路标的形态识别具有明显的优势,最后分析了图像尺寸大小、特征点数量对OSPA距离的影响.
OSPA距离; 马尔科夫随机场; 路标图像; 边缘点
0 引言
路标识别在智能/辅助驾驶中有非常广泛的应用,比如辅助驾驶时,车载仪器通过识别路标可以提醒驾驶员.智能汽车自动驾驶时,路标的正确识别有助于减少交通事故,因此,路标识别具有广泛的应用前景.通常路标具有特定的颜色以及形状,颜色主要是红色表示禁令,黄色表示警示,蓝色表示指示,形状主要是三角形,圆形,矩形,外轮廓都是对称的.现在的对于路标识别问题的研究可以基本分为颜色和形状两个方面研究.
但是,噪声的存在对路标识别有着比较大的影响,为此,文献[1-2]针对噪声路标的识别问题,提出了一种Markov随机场算法.此外,基于颜色和形状混合的检测模型和基于模板匹配算法的识别模型[3],彩色阀值分割算法[4-5],主成分分析方法[6].由于图像识别需要遍历寻优,所以这样做的计算量非常大.在文献[1-2]的基础上,该文进一步提出平均最优次模式(OSPA)集合点集距离识别路标图像.
1 背景及其问题描述
对于图像库库中第i张图片来说,Pi={pi(i),p2(i),p3(i),…,pn(i)}代表了这张图片所有的特征点集合,Qj={q1(j),q2(j),q3(j),…,qm(j)}表示待检验图片的所有特征点集合,两组特征点个数可能不同,该文通过两个集合之间距离评价待识别图像;由于读取图片时存在外界因素的干扰,会导致待检验图像特征点集合发生改变,对于这种噪声的产生无法避免.
2 路标图像的Markov随机场噪声处理方法
假设y={yi}为观测路标图像,i表示第i个像素点,建立如下的路标噪声图像:
yi=fi+ei
(1)
其中yi为标识第i个点观测像素值,fi为第i个点真实像素值,ei是噪声变量.则后验概率为:
(2)
δ(fs,fr)=1(fs=fr) or -1(fs≠fr)
其中,fs,fr为恢复图像,s,r像素点的标识变量,h,β,η为参数,ys为观测图像s像素点的标志值.公式(3)可以等价地转换为求解能量函数U(f|y)的最小值.即:

(3)
这里采用ICM 算法遍历每个噪声像素点的能量值,获得恢复后的图像.边缘点刻画了路标图像的形状信息,是识别路标图像的关键信息之一.由于得到的边缘点的个数比较多,平均采样点算法来减少特征点数,同时保证采样后的点能充分描述路标的形状.
3 点集集合距离匹配算法
最优次模式(OSPA)距离用于评价两个集合之间的距离,定义如下[7]
(4)
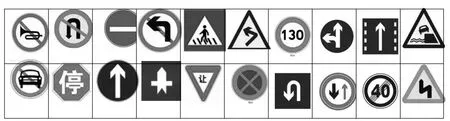
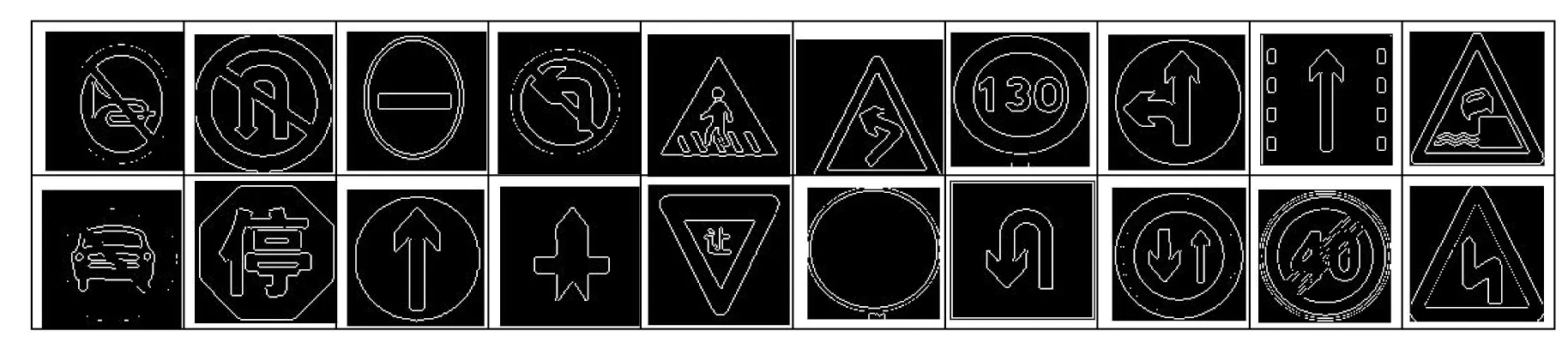
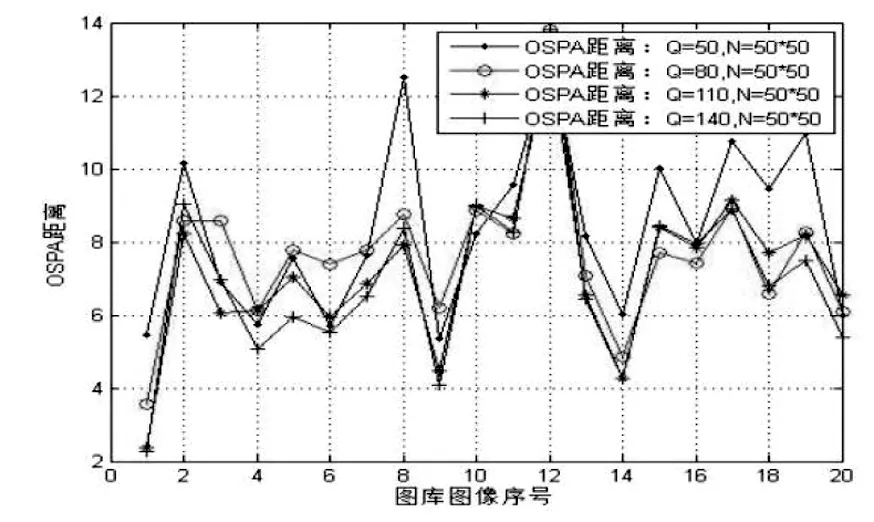
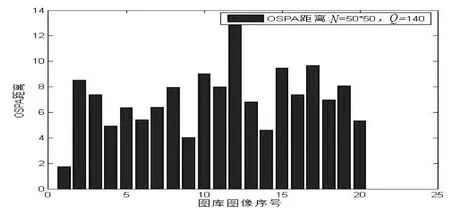
d(p,c,Pi,Qj)=d(p,c,Qj,Pj) ifm p代表阶数,c代表一个水平调节参数,用于调节集合元素个数的误差比重,相当于把特征点个数差异转换为特征点误差,点个数差异重要的话选择比较大的数.m,n分别标识Pi,Qj中的特征点个数.由于Pi,Qj是采样后的特征点集,采样点具有很大的波动性和随机性,为此,在本算法中,通过统计K次平均点集距离来计算两幅图像的OSPA距离,即: 图1 标准路标图像 图1选取了一组具有代表性的路标图像作为实验的标准图库,针对各种形状和颜色都有选取,得到的实验结果可靠性较高,路标图像的边缘提取后如图2所示. 图2 图像边缘检测 图3给出了特征点个数变化时,待检图像和标准库各图像之间的距离,均为50×50的时候检索第一幅图片得到的数据结果,其中N代表了图像的大小,Q代表了特征点个数.图4是图像大小在不同采样点条件下相对于第1幅图像的OSPA评价距离,可以看出,该文算法都很好地识别出待检路标图像. 分析图像大小、特征采样点个数对待检路标图像的OSPA距离的影响,其中,OSPA距离采用5次采样循环平均值,以减少随机误差.从图3和图4可以看出:当图像的大小相同时,图像的特征点数量越多,得到的OSPA距离就越小;而且路标图像识别的准确率就越高,但是随着准确率的提高,识别所需要的时间也有所增加. 对于两种不同尺寸图像进行对比分析(如图5所示),图像尺寸较小时,得到的OPSA距离值变小;不过,小尺寸图像在相同特征点数量时,其识别率比大尺寸图像的识别率高,而且所需要的时间大大减少. 图3 特征点个数-OSPA距离关系 图4 图像大小-OSPA距离关系 图5 待检图像-标准图库OSPA距离平匹配 (路标图像大小50×50,采样特征点140) 该文提出了一种基于集合点集距离的路标图像识别算法,可以噪声干扰条件下稳定识别路标图像.所给算法首先建立待检图像的Markov模型,然后采用ICM算法恢复带噪声的图像,然后提取其边缘点,最后使用平均OSPA距离评价两幅图像之间的距离.此外,特征点采样过程来选择和减少特征点个数,有效提高了运算速度.最后,分别围绕图像尺寸、特征点个数对集合距离的影响进行了分析. [1] Yang Ailan,Liu Weifeng,Wen Chenglin.Denoising and Recognition for Road Signs Based on Markov Random Fields [C].Lecture Notes in Electrical Engineering,Electrical,Information Engineering and Mechatr- onics,2012:679-687. [2] 杨爱兰.基于马尔科夫随场的路标识别算法研究[D].杭州电子科技大学,2012. [3] 陈攀,李钦富.一种自动路标检测与识别模型设计与实现[J].信息技术,2015,8(33):124-128. [4] Jacopo G,pierre S.Edge preserving smoothing using a similarity measure in adaptive geodesic neighhourhoods[J].Pattern Recognition,2009,42(10):2306-2316. [5] Mescarn M,Kretowski M,Beywendling J.Multiscale model of liveDce-Mn towaeds a better under-standing oftumor complexity [J].IEEE Transactions on Image Processing,2010,29(3):699-707. [6] Desale R P,Verma S V.Study and Analysis of PCA,DCT and DWT Based Image Fusion Techniques[C].International Conference on Signal Processing Image Processing and Pattern Recognition,2013:66-69. [7] Schuhmacher D,Vo B T,Vo B N.A consistent Metric for performance evaluation of multi-object filters.IEEE Transactions on Signal Processing,2008,56(8):3447-3457 Abstract:In this paper,a recognition algorithm for road signs based on the optimal sub-pattern assignment (OSPA) metric is proposed.The noisy road sign picture is gained by using Markov random fields.The true picture is then recovered by using iterative condition method (ICM).Based on the recovered picture,the marginal points are derived and seen as pending characteristic points.Then,the OSPA metric is proposed to evaluate the distance between standard characteristic points and pending characteristic points.The standard one which has the smallest OSPA distance is judged to be the correct class.The final results show that proposed algorithm gives a better recognition.Finally,the influence of picture size,the number of characteristic points on OSPA is analyzed. Keywords:OSPA distance; Markov random field; Landmark image; Edge point (责任编辑:季春阳) ARecognitionAlgorithmforRoadSignsBasedontheOSPAMetricandCharacteristicPointSampling ChenLi,LiuWeifeng,YangAilan (HangzhouDianziUniversity) TP391 A 1000-5617(2017)02-0055-03 2017-01-04 *浙江省自然科学基金资助项目(LY15F030020);杭州电子科技大学2016年高等教育研究资助项目资助.“本科生实验室科研创新研究与实践”(YB201662)
4 实验仿真

5 结束语