油气管道检测机器人避障运动控制算法研究
2017-09-29曲伟亭孙首群
曲伟亭 孙首群
摘 要:针对油气管道专用检测机器人运动控制系统进行研究。在深入分析管道内机器人运动特性的基础上,利用基于模糊控制与神经网络控制的环境自学习网络方法对环境信息进行学习判断。利用模糊神经网络方法对管道机器人的运行轨迹进行自学习跟随,同时解决了管道机器人障碍物识别与规避的问题。仿真结果表明,该方法能够实现管道机器人的环境识别、路径跟随与障碍物识别等功能,符合管道检测的实用要求,具有较高的实际应用价值。
关键词:油气管道检测;机器人;模糊神经网络控制;避障
DOI:10.11907/rjdk.171544
中图分类号:TP312 文献标识码:A 文章编号:1672-7800(2017)009-0068-04
Abstract:The purpose of this paper is studying at the special oil and gas pipeline inspection robots motion control system, based on the analysis of the pipe robot movement characteristics to studying and judging environmental information, which from the fuzzy control and neural network of self-learning network environment. Using fuzzy neural network theory to track the running orbit of the pipeline robot, the obstacle recognition and avoidance problem of the pipeline is solved by the fuzzy neural network method. The simulation results show that the method can realize the environment recognition, path following and obstacle identification of pipeline robot. The method can meet the practical requirements of pipeline inspection and has high practical application value.
Key words:oil and gas pipeline detection; robot; fuzzy neural network control; obstacle avoidance
0 引言
隨着石油、天然气运输管道大范围铺设,上述管道的维护、维修与检测等工作大量增加。传统的维修检测方法包括全面挖掘法、随机抽样法等,都存在参与人员多、工作量大、效率低的缺点[1-3]。为了克服上述缺点,管道机器人应运而生。管道机器人在管道内部自动或半自动运动,对管道进行检查,工作过程仅需要少量机器人控制人员参与,从根本上解决了传统油气管道检测方法存在的弊端,因而近年来获得了大量的研究和应用。
管道机器人在作业过程中,运行速度、平稳性以及过弯能力、越障能力等运动性能,直接关系到作业效果;机器人的运动性能又受管道内障碍、机器人执行机构的输出误差以及机器人自身载荷变化等影响。因此,管道机器人的运动控制问题成为该领域的研究重点与难点之一[4]。国外管道机器人始于20世纪40年代[5],并于90年代初迅猛发展,接近于应用水平。由于国内关于管道机器人的研究起步较晚,管道机器人运动控制技术在精确性、稳定性、反应速度等方面与欧美等技术发达国家相比,还存在一定的差距[6]。上海交通大学的履带式管道机器人,其控制系统采用基于分层模糊控制的路径跟踪控制算法、模仿学习中的最大化边际规划方法,有效降低了控制器运算量,提高了机器人自主导航的鲁棒性能与自主避障能力[7-8]。文献[9]研制的轮式管道机器人,在机器人控制器中采用模糊控制、复合式学习算法与PID调节,可实现机器人本体的灵活弯曲与越障,可在水平管道或坡度较小的倾斜管道内运行。
传统的控制方法可以满足简单、易行走管道内机器人运动稳定性与灵活性的要求,但是若管道内部环境复杂,如出现大量腐蚀凹陷、障碍物以及弯道较多,要保证机器人运动控制的稳定性与实时性是十分困难的。本文基于模糊控制与神经网络控制算法,提出一种新的模糊神经控制算法,克服了单一控制方法中神经网络学习收敛性差以及模糊逻辑控制规则过多的缺点,能够显著提高机器人的反应能力,从而实现机器人快速、准确地避障。
1 机器人运动控制方法分析
1.1 模糊控制方法
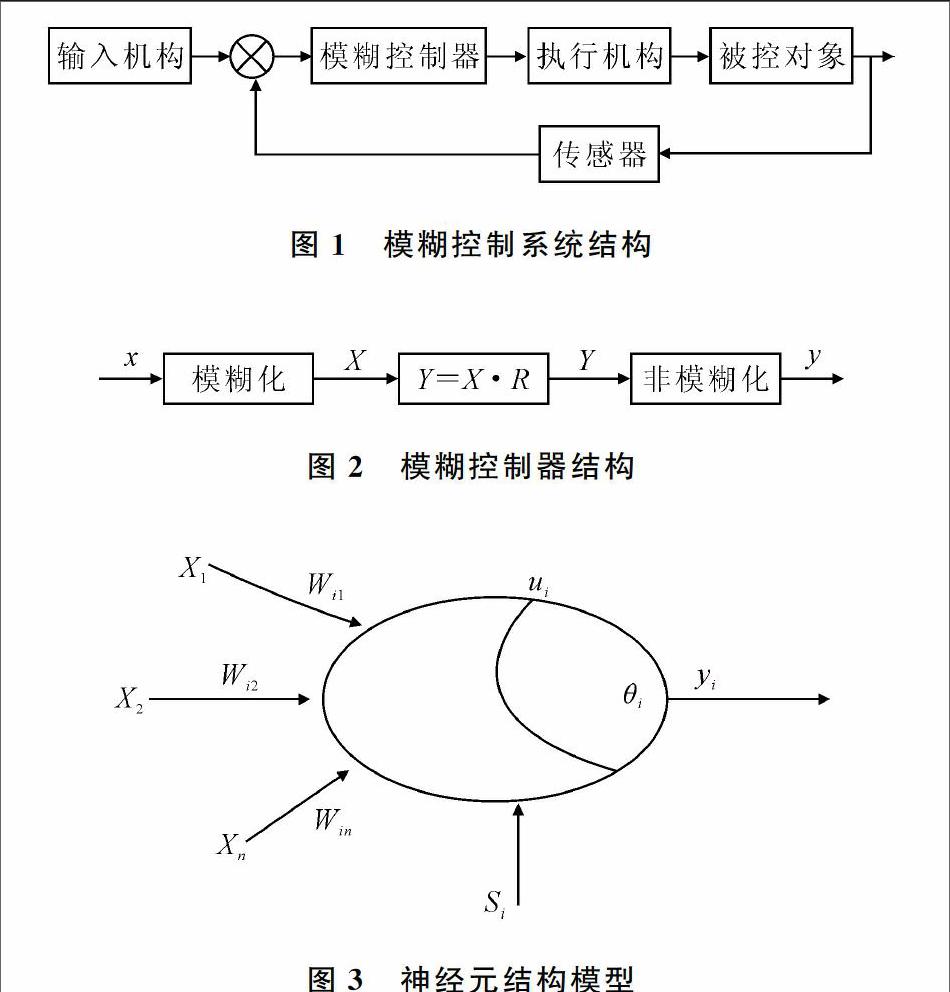
模糊控制系统是一种典型的智能控制系统,通过模拟人的模糊逻辑思维方法,对复杂过程进行控制[10]。它是以模糊数学、模糊语言形式的知识表示并以模糊逻辑推理为理论基础,采用计算机控制技术构成的一种具有闭环结构的数字控制系统[3]。模糊控制系统通常由输入机构、模糊控制器、执行机构、被控对象与传感器等5个部分组成。其结构如图1所示。
对于检测机器人的运动系统控制而言,要想采用模糊控制系统,其关键问题是要建立合适的模糊控制器,模糊控制器的理论结构如图2所示。其中:x表示模糊控制的数值输入值,y表示模糊控制的精确数值输出值,X表示模糊控制系统中经过模糊化的数值输入值,Y表示模糊控制系统中经过模糊化的数值输出值,关系R可视为模糊控制系统中受约束的[0,1]区间的N个变量的函数。
1.2 神经网络控制方法
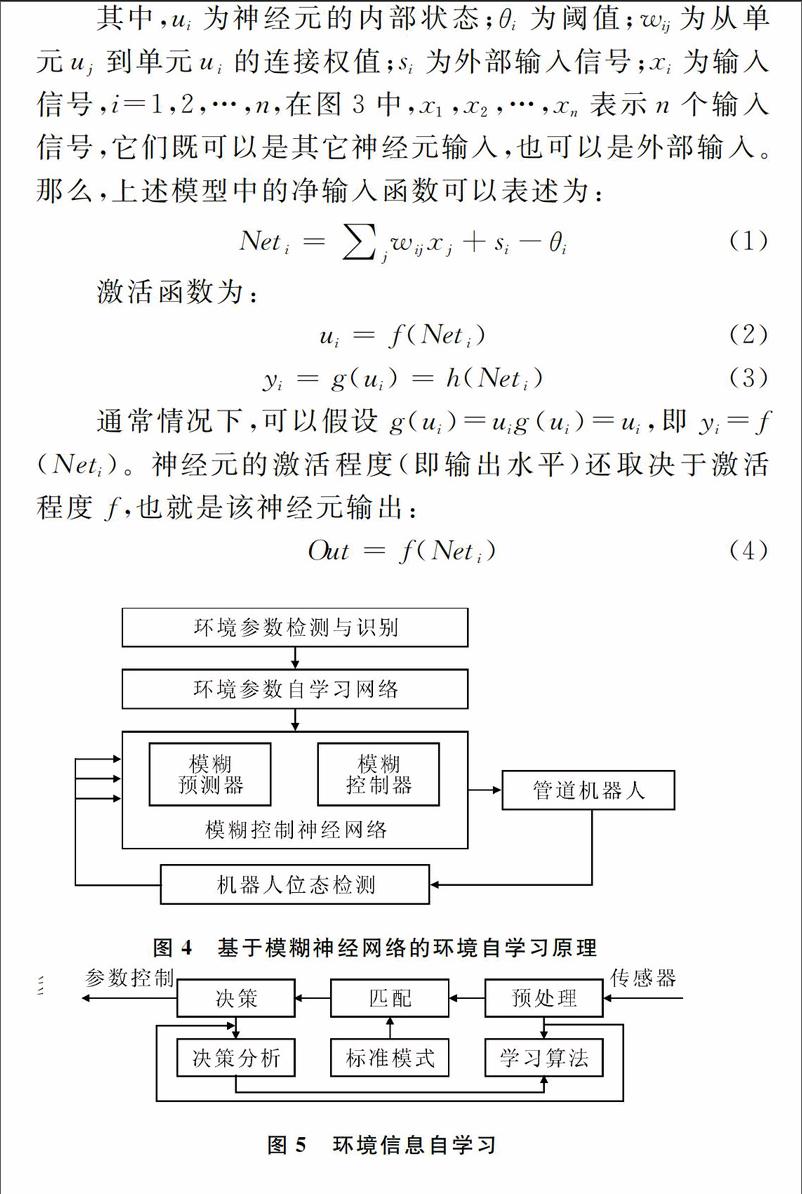
神经网络控制是模拟人脑神经中枢系统智能活动的一种控制方式。神经元是神经网络的基本单元,是生物神经元的抽象与模拟,通过模拟生物神经元的结构与功能,从数学角度抽象出来的一个基本单元[11-12]。神经元一般是多输入单输出的非线性器件,结构如图3所示。endprint
其中,ui为神经元的内部状态;θi为阈值;wij为从单元uj到单元ui的连接权值;si为外部输入信号;xi为输入信号,i=1,2,…,n,在图3中,x1,x2,…,xn表示n个输入信号,它们既可以是其它神经元输入,也可以是外部输入。那么,上述模型中的净输入函数可以表述为:Neti=∑jwijxj+si-θi
(1) 激活函数为:ui=f(Neti)
(2)
yi=g(ui)=h(Neti)
(3) 通常情况下,可以假设g(ui)=uig(ui)=ui,即yi=f(Neti)。神经元的激活程度(即输出水平)还取决于激活程度f,也就是该神经元输出:Out=f(Neti)
(4)2 机器人控制算法设计
本文基于模糊控制与神经网络控制算法,采用模糊神经网络控制算法[13],在处理非线性、模糊性等问题上有很大的优越性,能够显著提高机器人的反应能力,从而实现机器人快速、准确地避障。
利用模糊神经网络实现环境信息的自学习。识别包括有障碍物的直管和空直管、有障碍物的弯管和空弯管、多种形状弯道等管道环境信息,具体如图4所示。
选用E18-D80NK-Y型红外传感器作为避障传感器。一方面,工作过程中传感器将采集的信号输入到预处理器,算法隨后将数据结果输入到匹配器与学习算法中,匹配器对预处理器输入数据与标准模式进行匹配,并将结果输出到决策器;另一方面,决策器结合决策与预处理器信息进行决策分析,对学习算法进行修正。具体过程如图5所示。
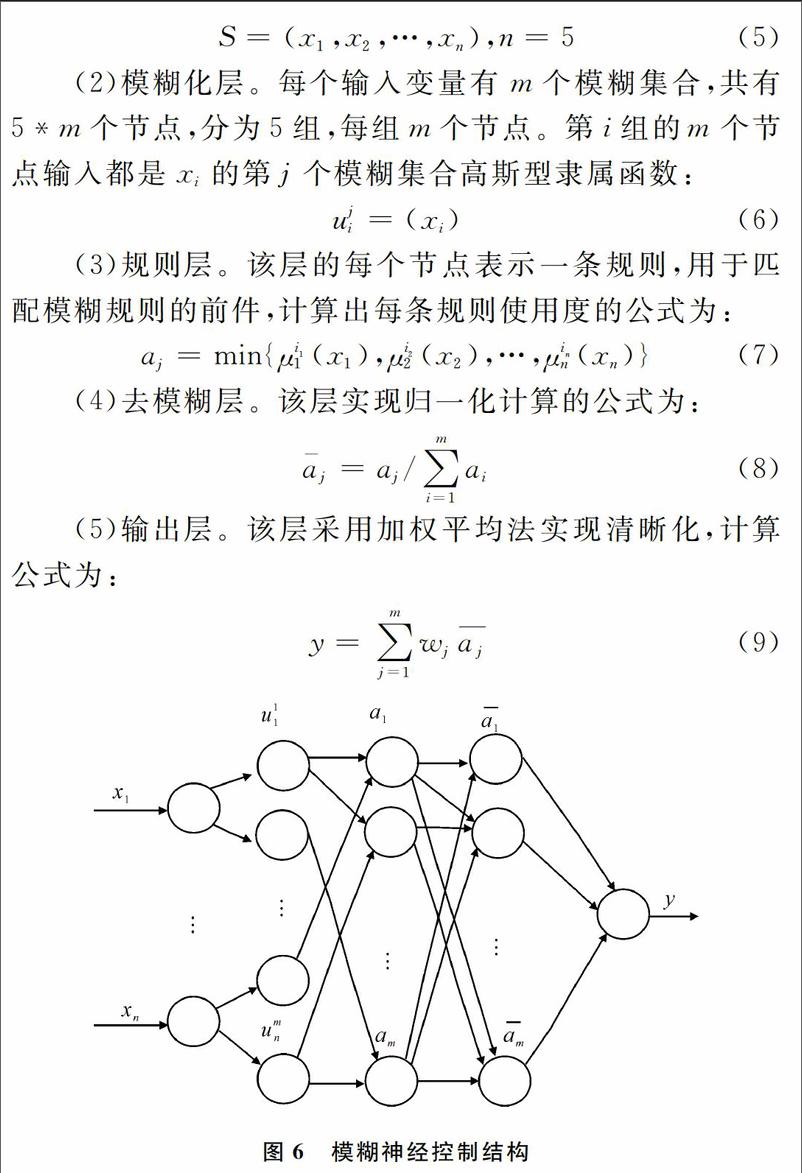
如图6所示,模糊神经网络控制结构具有模式识别的功能,它包含输入层、模糊化层、规则层、去模糊层、输出层5层[14]。
(1)输入层。其作用是将传感器的检测数据作为输入值与n个节点直接连接,并将输入变量传送到下一层。模糊神经控制的输入值为:S=(x1,x2,…,xn),n=5
(5) (2)模糊化层。每个输入变量有m个模糊集合,共有5*m个节点,分为5组,每组m个节点。第i组的m个节点输入都是xi的第j个模糊集合高斯型隶属函数:uji=(xi)
(6) (3)规则层。该层的每个节点表示一条规则,用于匹配模糊规则的前件,计算出每条规则使用度的公式为:aj=min{μi11(x1),μi22(x2),…,μinn(xn)}
(7) (4)去模糊层。该层实现归一化计算的公式为:j=aj/∑mi=1ai
(8) (5)输出层。该层采用加权平均法实现清晰化,计算公式为:y=∑mj=1wjaj
(9)
3 仿真模拟实验
本文利用红外传感器的感应信号作为控制输入,经过模糊神经网络控制算法进行处理,控制检测机器人的运动方向。
3.1 实验方案
将6个传感器分为两组,通过第一组传感器H1、H2、H3的输入信号控制机器人的前进运动,通过第二组传感器H4、H5、H6的输入信号控制机器人的后退运动。两组控制规则相同,本文以第一组的控制规则为例,进行机器人的运动控制。
3.2 机器人运动路径规划规则
检测机器人在管道内的运动过程中成功避开障碍物,必须对检测机器人进行路径规划,路径规划原则是路径尽可能短、消耗能量尽可能小、时间尽可能短。
根据红外传感器的布置情况,可将检测机器人当前感知环境的期望分为7类,分别为:类型1,前方无障碍;类型2,正前方有障碍;类型3,左前方有障碍;类型4,右前方有障碍;类型5,正前方、左前方均有障碍;类型6,正前方、右前方均有障碍;类型7,正前方、左前方、右前方均有障碍。
根据检测机器人所使用传感器的测距范围(5~100cm)与机器人的尺寸,得出反映机器人当前感知环境期望类别的期望特征向量,输入该期望特征向量,组成模糊神经网络控制训练样本数据库。
3.3 结果分析
为了验证本文提出模糊神经网络控制算法的有效性和可行性,利用仿真软件对控制算法进行仿真实验。机器人采用6个红外传感器探测局部障碍信息。每隔2s进行一次检测,将获得的传感器数据经初次融合后,作为模糊神经网络的输入,再次进行数据融合,模糊神经网络输出结果作为系统的控制量。以图7数据作为目标跟随的初始样本数据,进行模糊神经网络算法分析,最终得到经过不同周期学习后系统管道内运动轨迹的学习。
对比图8-图10可发现,经过35个学习周期后,目标跟随误差达到0.18;经过70个周期后,目标跟随误差达到0.08;经过350个周期后,目标跟随误差达到0.06。所选择算法能够很好地跟随目标。
管道机器人对管道内障碍物规避结果如下:图11、图12代表障碍物,三角形构成的曲线表示机器人的运动轨迹,机器人从左向右移动。
(1)机器人在运动过程中,若右前方有障碍物,运动路径如图11所示。当机器人检测到右前方出现障碍物时,控制系统读取红外传感器,扫描障碍物的位置及大小等数据,通过模糊神经控制算法快速准确地调整运动路线,在原定路线的基础上靠左行驶躲避障碍物,经过障碍物后再回归原定路线,继续直行。
(2)机器人在运动过程中,若正前方、右前方均有障碍物,运动路径如图12所示。当机器人检测到正前方、右前方均出现障碍物时,控制系统读取红外传感器,扫描障碍物的位置及大小等数据,通过模糊神经控制算法快速准确地调整运动路线,在原定路线的基础上,从两个障碍物中间行驶通过障碍物,经过障碍物后再回归原定路线,继续直行。
4 结论
机器人从出发点开始,在多障碍物的仿真环境中安全、快速、无碰撞地前进,到达终点,满足了安全、快速避障的性能要求。结合模糊控制与神经网络控制组成的模糊神经网络控制,可以更高效地实现机器人的避障运动,证明本文提出的模糊神经网络控制算法是正确、有效的。endprint
参考文献:
[1] 康勇.油气管道工程[M].北京:中国石化出版社,2008.
[2] GOBI AF, PEDRYCZ W. The potential of fuzzy neural networks in the realization of approximate reasoning engines[J].Fuzzy Sets and Systems,2006,157(22):2954-2973.
[3] 陈向坚,李迪.模糊神经网络在自适应双轴运动控制中的应用[J].光学精密工程,2011,19(7):1645-1646.
[4] 张凯,钱锋,刘曼丹.模糊神经网络技术综述[J].信息与控制,2003,32(5):431-435.
[5] DENG XS, WANG XZ. Incremental learning of dynamic fuzzy neural networks for accurate system modeling[J].Fuzzy Sets and Systems, 2009,160(7):972-987.
[6] 刘晓洪.新型蠕动式气动微型管道机器人[J].液压气动与密封,2007,(1):16-18.
[7] 郭凤.管道机器人弯道处驱动力研究[J].哈尔滨工业大学学报,2006,38(8):1265-1266.
[8] 郭瑜.微小型螺旋推进管道机器人设计分析[D].长沙:国防科技大学,2006.
[9] AMIR H HEIDARI, MEHRANDEZH M, PARANJAPE R,et al. Dynamic analysis and human analogous control of a pipe crawling robot[C]. Louis,USA: The 2009 IEEE/RSJ International Conference on Intelligent Robots and SystemsSt,2009.
[10] SE-GON R, HYOUK R C. Differential-drive in-pipe robot for moving inside urban gas pipelines[J]. IEEE Transactions on robotics, 2005,21(1):1-17.
[11] 朱玉芳,施祖康.智能管道檢测机器人[J].机械制造,2003,41(463):13-14.
[12] 蔡阳春.管道检测机器人结构优化以及运动控制研究[D].北京:北京科技大学,2010.
[13] JUANG CF, CHEN TM. Birdsong recognition using prediction-based recurrent neural fuzzy networks[J]. Neurocomputing,2007,71(3):121-130 .
[14] 徐翔.管道机器人研制与工程应用[D].上海:东华大学,2006.
(责任编辑:何 丽)endprint
