盲区监测变道辅助系统标定方法的研究
2017-09-29李华俊
李华俊
(长城汽车股份有限公司,河北 保定 071000)
盲区监测变道辅助系统标定方法的研究
李华俊
(长城汽车股份有限公司,河北 保定 071000)
详细介绍盲区监测变道辅助系统静态与动态的标定方法及相关要求,并根据雷达生产厂家以及现场场地的限制因素来选取最优的标定方式,以提高汽车驾驶的安全性能。
无人驾驶技术;盲区监测;变道辅助;雷达;标定
越来越多的中高端汽车装配了盲区监测变道辅助系统(Rear Spot Detection System,以下简称RSDS),且无人驾驶技术的成型也离不开它。确保雷达安装的精度是保证安全驾驶的保障。由于雷达生产厂家的不同以及汽车厂场地、生产节拍的限制,雷达的标定要求也有所不同,本文对多种情况进行研究分析。
1 RSDS工作原理
由于汽车后视镜存在视觉盲区,如果盲区内有超车车辆,此时变道就会发生碰撞事故,RSDS系统就是为了解决后视镜盲区而产生的。通过在汽车后保险杠内安装2个雷达传感器(76 GHz),在车辆速度大于10km/h时自动启动,实时向左右3m,后方8 m范围发出探测微波信号,最大探测距离为50m[1],系统对反射回的微波信号进行处理,即可知后面车辆距离、速度和运动方向等信息。通过系统算法,排除固定物体和远离的物体,当探测到盲区内有车辆靠近时,指示灯将闪烁。如果此时驾驶员仍然没有注意到指示灯,打转向灯准备变道,那么系统就会发出“哔哔哔”的语音警报,如图1所示。
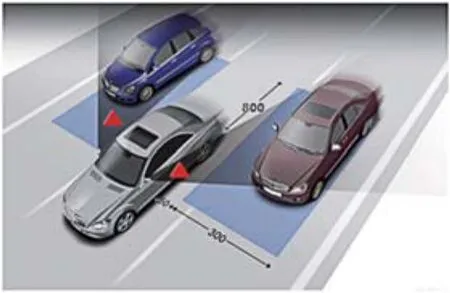
图1 RSDS工作原理
2 RSDS雷达标定方法
RSDS雷达标定方式主要分为静态标定与动态标定。
2.1 静态标定
静态标定的目的是通过确定雷达轴线与车辆行驶轴线在水平方向上的偏差,再通过参数写入使雷达确定自身与车辆行驶轴线之间的正确角度。对于静态标定校准反射器的布置形式分为垂直布置式和水平布置式。
2.1.1 垂直布置式
垂直布置式如图2所示,以DELPHI雷达为例。

图2 垂直布置式
2.1.1.1 雷达水平角度范围计算
因为水平发射面=150°,雷达平面=0°,允许的水平角度安装误差=±5°,所以全水平发射面=160°。因为标定兴趣角度=6°,允许的水平角度安装误差=±5°,所以标定兴趣全角度=6+5×2=16°,其中镜面的倾斜角度β为45°。
2.1.1.2 雷达垂直发射角度范围计算
当垂直发射面=9°,允许的垂直安装角度误差=±5°,全垂直发射面角度=9+5+5=19°。
2.1.1.3 镜面高度计算根据图3可得出

因为A=1.0 m,α=19/2=9.5°,所以HM=0.487 m。
注:这个高度应该是一个常数。但在生产线标定布置时,应该考虑到安装在车上的雷达必然会存在一定的高度误差,比如悬架高度误差,或者轮胎胎压直径误差等。因此在使用前,还要根据可能出现的误差范围再次标定这个数据。
图4是车辆高度变化影响的分析,公式

图3 镜面高度计算

因为α=9.5°,从这个分析可知,当雷达高度变化±1 cm,镜面高度需要变化±1.32 cm。
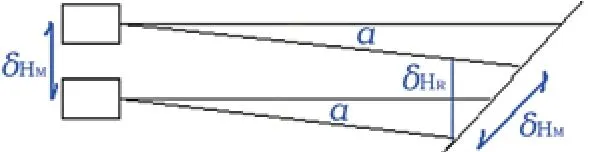
图4 车辆高度变化分析
2.1.1.4 镜面宽度计算
由于反射镜面是倾斜的,所以理论上,雷达反射波束在倾斜的镜面上的射影是一个梯形,且镜面应该大于雷达波束的投影,如图5所示。

图5 镜面宽度计算
实际生产中,很明显异型的金属反射板不易加工,且如果按照160°来进行现场标定占用场地过大,所以选取前面提到的标定兴趣角度(16°)来完成现场实际标定,具体计算方法如下。
由图5a得出,A〃=A/(1-tanα);
因为A=1.0 m,α=9.5°,所以得出A〃=1.200 m,WM=0.410 m。
这样做出的反射板宽度明显减少,且可以取长边长度做长方形的金属反射板。但是当车辆进入车轮定位位置时,雷达的相对位置会产生一定的变化误差,这个变化范围会对雷达发射中心线与镜面中心线的相对位置产生变化。这个变化范围的计算如下,如图6所示。

因为α=9.5°,所以雷达高度变化为±1 cm时,镜面宽度的发射面宽度变化为0.24 cm。
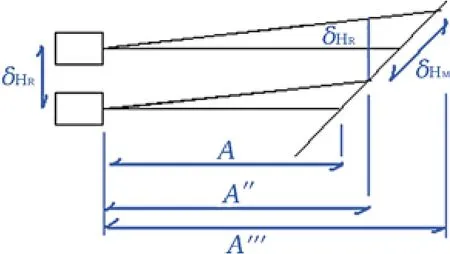
图6 雷达高度变化
2.1.1.5 目标板高度计算
由图7可得

已知A=1.0 m,B=2.0 m,α=9.5°,所以HB≈1.002 m。
由于雷达可能存在的高度变化,背板的长度也需符合变化范围。如±1cm的雷达高度变化范围,背板长度也需要±1cm的变化范围。
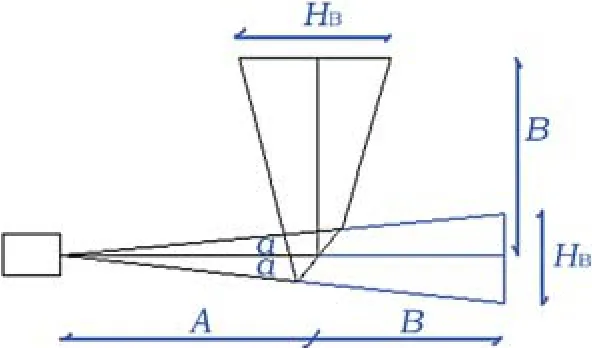
图7 目标板高度计算
2.1.1.6 目标板宽度计算由于反射镜镜面是倾斜的,吸波器背板的投影实际应该是梯形,但由于异型背板不易制作,且雷达安装误差对背板的影响较大,所以取长边制作为长方形。
由图8可得
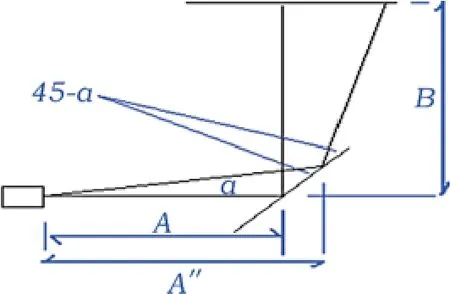
图8 目标板宽度计算

因为A=1.0 m,B=2.0 m,α=9.5°,得出WB=34.50 m;取兴趣标定角度16°进行计算,WB=0.855 m。
2.1.1.7 目标角反射器位置
1)需要保证角反射器与雷达反射中心线同心放置。

图9 目标角反射器位置
2)如图9所示,角反射器在WCR方向上的误差不能超过±0.5°,假设雷达安装误差是±1 cm,那么在3.0 m处误差角度为±0.19°,因此△WCR,=(A+B)tan0.35°,WCR方向上误差为±1.8 cm。
3)不需要定义△DCR,因为角反射器安装在吸波板表面。
对于△HCR,如果安装过高或者过低,反射器可能超出标定时雷达的检测范围。因此在这个方向上,要保证雷达安装在反射面的±9.5°范围内,即△HCR=(A+B)tan9.5°≈0.5 m。
2.1.1.8 各部件要求
1)反射镜面 反射镜面不是一个真正意义的镜子,而是一块抛光镜面钢板,表面粗糙度小于0.6 μm,反射镜面的大小按照实际计算值来确定。
2)目标背板 目标背板是一个覆盖了吸波材料的铝板,一般设计为正方形,角反射器安装在目标背板的中心位置,偏差不能超过±0.5 cm。背板大小按照实际计算值来确定。
3)角反射器 目标背板上安装的角反射器一般用15 dB/m2,材料可以是铝、铜或钢,如图10所示。其中,角反射器3个外边长为147 mm±5 mm,3个内边长为104 mm±5 mm。
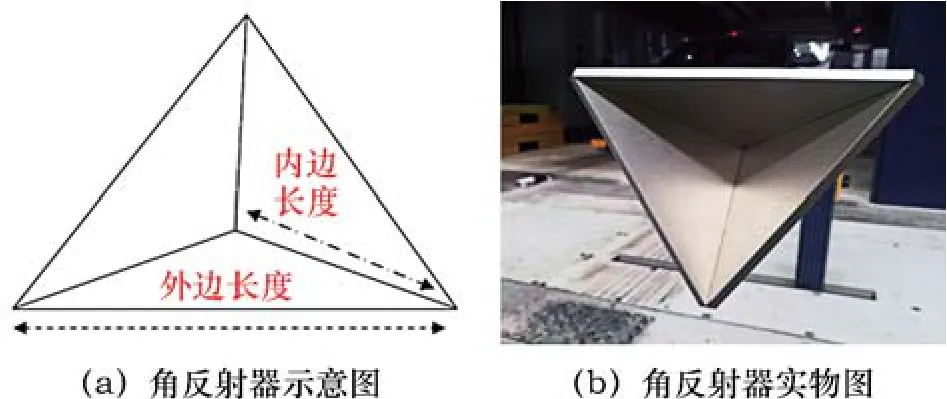
图10 角反射器
4)吸波材料 吸波材料的关键特性是可以吸收高频率电磁波(>20 GHz),吸波材料的吸收能力需要进行专业部门的认证。如图11所示。
2.1.1.9 RSDS下线检测流程以某车间实际检测流程为例,具体见图12。
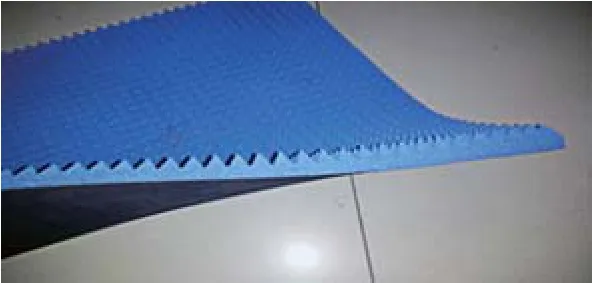
图11 吸波材料

图12 RSDS下线检测流程
2.1.2 水平布置式
水平布置式见图13,其中雷达以BOSCH为例。

图13 水平布置式
2.1.2.1 基础条件
角反射器位置:雷达到角反射器的距离>1.4 m,角反射器到角反射器立柱的距离>0.7 m(一般推荐大于1.4 m)。
环境条件:在地面上不应有其他金属反射物体,如果有,需要用吸波材料进行遮挡。对角反射器的要求见表1。

表1 对角反射器的要求
2.1.2.2 角反射器安装方案
1)对于角反射器在侧后方的方案1(图14)。 ①吸波材料大小规则:吸波材料的高度=雷达到角反射器的距离×tan20°+雷达的高度,由于雷达到角反射器的距离应不小于1 410 mm,雷达高度根据不同车型应在300~1 000 mm之间。据此,吸波材料高度为813~1 513 mm。②两组吸波材料墙之间的距离为500 mm。③吸波材料到车辆的距离为≥1.2 m。④吸波材料的宽度:车辆侧面的吸波材料宽度1 000 mm;车辆后方的吸波材料宽度4 000 mm。⑤车辆后方4.4 m范围内不许有其他反射物,否则需要吸波材料遮挡。

图14 角反射器在侧后方
2)对于角反射器在后方的方案2(图15)。①吸波材料大小规则:吸波材料的高度=雷达到角反射器的距离×tan20°+
雷达的高度。由于雷达到角反射器的距离应不小于1 410 mm,雷达高度根据不同车型应在300~1 000 mm之间,据此,吸波材料高度为813~1 513 mm。②吸波材料的宽度:车辆侧面的吸波材料宽度1 000 mm;车辆后方的吸波材料宽度4 000 mm。③吸波材料到车辆的距离≥1.2 m。④车辆后方4.4 m范围内不许有其他反射物,否则需要吸波材料遮挡。
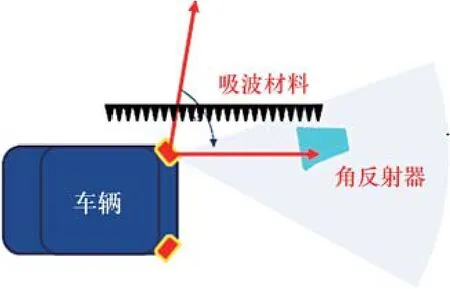
图15 角反射器在后方
2.1.2.3 校准失败的可能原因
校准失败的可能原因:①反射器到雷达前方距离过近;②发射向反射器的雷达波被遮挡;③雷达的安装偏差过大;④有来自其他类似距离的反射干扰;⑤在目标区域内有来自其他目标更强烈的反射。
2.2 动态标定
标定短道是一条长度为100 m±10 m的道路,在短道两侧安装角反射器。当安装有为标定雷达的车辆在短道上行驶时,启动标定服务的车辆将自动进行下线标定。如图16所示。

图16 动态标定(以DELPHI产品为例)
2.2.1 基本要求
1)道路要求 ①长度为100 m±10 m;②路况为平路、直路。
2)目标间距 ①角反射器之间的间距为3.5 m±0.5 m;②角反射器的布置总数应该是75 m/(3.5±0.5 m)。
3)标定短道宽度 7 m±0.5 m。
4)标定驾驶速度 标定驾驶速度为>20 m/s。
5)目标支架高度 目标安装高度应该是雷达安装高度±10cm。
6)目标支架需求 ①不需要在目标支架上安装吸波材料;②目标支架的材料可以是塑料、木材、金属等。
7)角反射器 ①目标背板上安装的角反射器是15 dB/m2,材料可铝、钢、铜;②角反射器3个外边长度:147 mm±5 mm;③角反射器3个内边长度:104 mm±5 mm。
2.2.2 动态标定计算雷达安装角度的误差方法
车辆向前开(图17中长方形沿箭头方向),斜线代表雷达实际安装位置,(r1,θ1)为雷达第1次探测到的数据。(r2,θ2)为雷达第2次
探测到的同一目标的数据。α为雷达实际安装角度。

图17 计算雷达安装角度的误差
根据余弦定理可以算出

计算得到的实际安装角度和理想状态下安装角度之差即为安装角度偏差。
2.2.3 雷达测速原理
雷达的测速原理同ACC雷达测速原理类同,图18是绘制CAD进行简易计算车距与车速的方法。

图18 雷达测速原理
前提是假设前后两车车速为恒定值,分别为 V1,V2,雷达波的频率为f,雷达波长为λ,雷达传播速度v0=ƒλ。
在t0时刻,汽车1发出雷达波开启盲区监测系统,雷达波向汽车2传播。经过时间t1,雷达波到达汽车2,此时雷达走过的距离为L1=v0×t1,S1=v1×t1,S2=v2×t1;经过时间t2,雷达波返回至汽车1,雷达返回的距离为L2=v0×(t2-t1),S3=v1×(t2-t1)。得出t1=t2(ƒλ+v1)/ 2ƒλ,所以L1=t2(ƒλ+v1)/2。
雷达波的频率较快,所以只测定出雷达波第1次触碰到前车的距离即可为当前的两车距离。
3 结论
汽车的安全性能是保证自动驾驶技术最重要的指标,驾驶辅助系统能够很好的帮助车主避免各种危险情况的发生,所以驾驶辅助系统的标定就显得非常重要。文中盲区监测变道辅助系统标定主要研究了3种形式的标定方法,具体选型可以根据检测场地的大小及生产节拍要求来选择标定方式。静态标定场地不受天气影响,但是浪费生产节拍,而动态标定受天气、雨雪等环境因素影响较大。因此,垂直式适用于标定场所较小,而水平布置式不受场地要求。
[1] 李守晓,毕欣,曹云侠.毫米波雷达的汽车盲点检测系统研究与设计[J].机械设计与制造,2013(9):25-27.
(编辑 凌 波)
ARPA-E在第13届年度锂电池材料和化学会议上介绍了固态电池商业化路径
先进能源计划署-能源(ARPA-E)正在为电池和燃料电池固态材料的研究投资,支持工作包括晶体和无定形无机物,以及玻璃成型、吹塑/挤出、轧制/压延、带铸造和气相沉积制造的聚合物。在即将举行的第13届锂电池材料和化学年会上,ARPA-E高级商业化顾问Sue Babinec将介绍该机构对这些技术的研究和商业化的看法,包括经济评估。
Babinec帮助领导ARPA-E的技术到市场的努力,强化的重点是将突破性的储能技术商业化。Babinec的职业生涯专注于材料、电活性材料、显示器、传感器和电化学等领域的研究和商业项目,在锂离子电池方面具有丰富的经验。
在ARPA-E之前,Babinec担任A123系统公司的技术总监,在那里她领导研究团队创新锂离子电池材料和电池技术,并开发了一个分析机构来支持公司的全球业务。
Babinec在陶氏化学公司工作了20多年,在那里被授予年度发明家,并且是该公司的第一位女企业研究员,她的角色还包括道德风险投资机构——物理科学的科学家领先的投资机会技术分析和初创投资的实际合作的合伙人。
Babinec拥有45项专利,并在她的专业领域撰写或合作撰写了数十篇期刊文章和书籍章节,她是材料研究学会和电化学学会的积极成员。
(信息来源:2017.7.28 Green Car Congress) ess戴朝典编译
The Research of RSDS Calibration Method
LI Hua-jun
(Great Wall Motor Co.,Ltd.,Baoding 071000,China)
This article focuses on the static and dyna mic calibration met hod of RSDS and relevant require ments.The optimized calibration method should be chosen based on specific radar manufacturer and environ ment variables,in order to improve the driving safety.
unmanned driving tec hnology; blind spot detection; lane-change assist; radar; calibration
U463.675
A
1003-8639(2017)09-0007-05
2016-11-15;
2017-05-10
李华俊(1990-),男,主要从事车辆试制及总装车间检测设备设计选型工作。
