基于向量的步履式挖掘机姿态调平规划
2017-09-28刘子超
刘子超
(中国兵器装备集团自动化研究所武器装备信息与控制技术研发中心, 四川 绵阳 621000)
【信息科学与控制工程】
基于向量的步履式挖掘机姿态调平规划
刘子超
(中国兵器装备集团自动化研究所武器装备信息与控制技术研发中心, 四川 绵阳 621000)
针对步履式挖掘机自动控制的需求,设计了一种步履式挖掘机姿态调平规划方法,使用向量描述了步履式挖掘机支腿与底座之间的角约束关系,使用向量长度以及各向量表示的支腿与底座的铰接关系确定姿态调平的目标位置,解算结果能够满足地面对轮的约束;通过仿真验证该方法能够对目标位置进行解算,且在各个支腿起始端均位于底座上的同时,末端位置共面。
步履式挖掘机;姿态调节;运动学逆解
步履式挖掘机是一种适用于特殊地形的工程机械,工作装置与传统履带式挖掘机大致相同,主要区别在于底盘行走部分克服了传统履带式挖掘机不能在复杂地形工作的特点,利用独立多自由度转向液压支腿进行自由角度调整,补偿地形凸凹高度差,实现在大角度倾斜地形行驶、行走、施工[1]。
步履式挖掘机行走装置结构上与轮腿式机器人类似,其各个支腿对车身姿态的影响受其他支腿的当前状态影响[2],为了实现步履式挖掘机姿态的智能调平,本文通过姿态传感器获取当前位置,运用向量针对其底盘进行运动学逆解,根据当前位置规划各关节的目标位置,为人工操作提供指导或实现姿态调平的自动规划。
1 步履式挖掘机行走底盘建模
1.1 步履式挖掘机行走装置简介
为使步履式挖掘机适应非结构化地形工况,底座周围设置4条支腿,并通过8个液压缸对支腿关节独立驱动,使其成为既能上下俯仰又能左右摆动的多自由度空间运动机构,从而调平车体姿态,适应各种复杂地形。小轮支腿安装有支爪,在工作时展开,用于承受挖掘反力,保持车身稳定;在非工作状态下,步履式挖掘机通过四个车轮内安装的液压马达接受发动机的动力,驱动整机行进,大轮设有转向液压缸用于转向[3]。步履式行走底盘结构如图1所示。
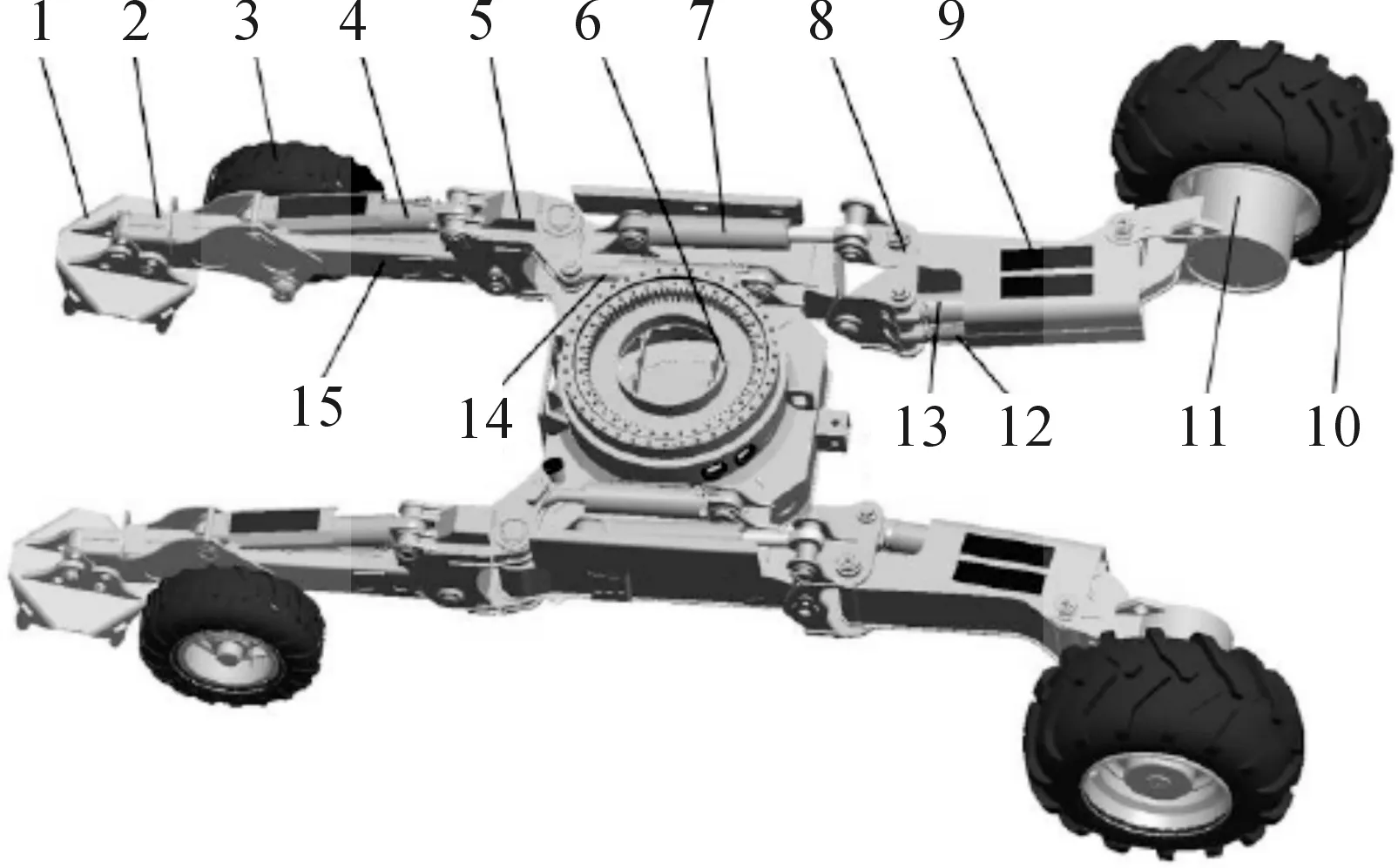
1.支爪; 2.前伸缩支腿; 3.前车轮; 4.前支腿俯仰液压缸; 5.前支腿铰接体; 6.底座; 7.后支腿俯仰液压缸; 8.后支腿铰接体; 9.后支腿; 10.后车轮; 11.后车轮驱动马达; 12.后支腿摆动液压缸; 13.后车轮转向液压缸; 14.前支腿摆动液压缸; 15.前支腿套筒
图1 行走底盘结构示意图
一般在使用人力操纵或遥控操作时,姿态调平仅使用4个升降油缸,待调平结束后,伸缩油缸驱动支爪插入地面,挖掘机即可正常作业[4]。
1.2 步履式挖掘机行走底盘向量表示方法
1987年就有学者提出使用向量进行串联机构的运动学正解[5]。步履式挖掘机行走装置为并联机构,直接使用三角函数计算较为复杂,本文采用向量关系表示关节角。在使用向量进行运动学解算时,首先构建适当的坐标系,确定表示底盘的向量组,再对向量组进行运算后。从原点出发,沿向量间的关系逐一确定向量所表示的边在空间中的位置,完成运动学逆解。
本文使用欧拉角方位表示法[6]。首先将坐标系原点固定于回转中心,以车辆行驶方向为x轴, 小轮侧为正半轴;以回转平台平面法向量为z轴方向,回转平台上方为正半轴;以xoz平面法向量为y轴方向,右边为y轴正半轴。当车体姿态调平时,该坐标系不随车体运动。各坐标值以毫米为单位,后文不再标注。
将底座视为一个固定的等腰梯形,顶点为四个升降机构铰接点。该等腰梯形不会随支腿的运动变化,可通过事先测量确定[7]。轮支腿的末端为大、小轮的轴,轴与地平面的间距为定值,即轮的半径。在建模时,将轮轴中心视作整条轮腿末端。
建模后的向量组如图2所示。图2中l表示左,r表示右,f表示前,b表示右,下标0表示支腿末端,下标1表示支腿始端与回转平台铰接处。回转平台的俯仰角θf为向量k与其水平面投影之间的夹角,横滚角θh为向量f或向量b与其水平面投影之间的夹角。
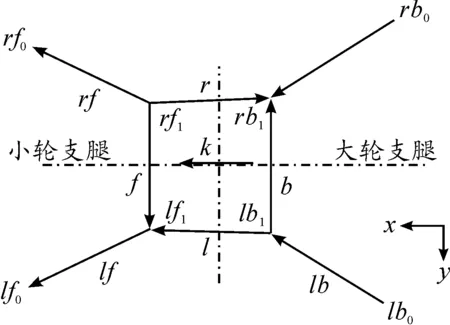
图2 行走底盘向量组表示
2 姿态调平解算
在姿态调平前,车体一般处于行走状态,在该状态下回转平台与地面平行,无需使用正解求解回转平台与地面的夹角。因为姿态调平需要的输入量为车体与水平面夹角,即俯仰角、横滚角,调平前先假定使用姿态角传感器已经获知了当前位姿。
各个支腿仅升降机构动作,理论上支腿末端所能到达的全部位置构成一段以其铰接点为圆心、以支腿在xoz平面投影的长度为半径的圆弧[8]。为了使姿态调平算法具有最大的调节量,首先确定最高侧腿的位置,应当与回转平台位于同一平面内。最高侧腿由俯仰角与横滚角值的决定,如表1所示。
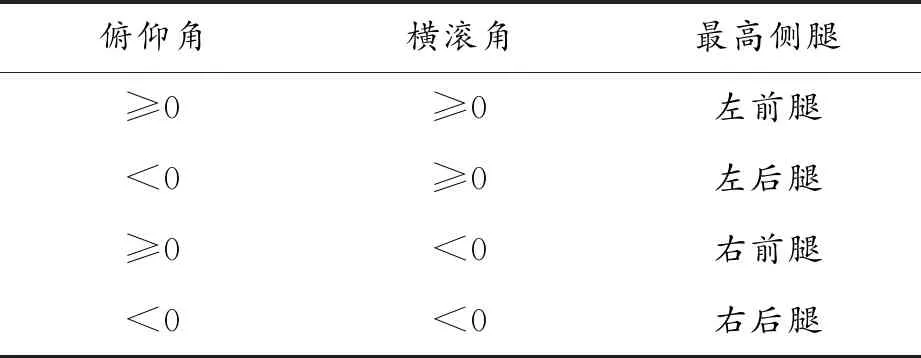
表1 最高侧腿与各倾角关系
假设当前俯仰角θf与横滚角θh均小于0,最高侧腿则为右后腿。首先根据某型步履式挖掘机结构数据[9]设定初始状态下的已知向量l、r、f、b、rb:
(1)
先计算俯仰角调节至0后各向量的方向,即各向量绕y轴旋转θf。根据罗德里格旋转公式[10]:
vr=cosφv+(1-cosφ)(v·k)k+sinφk×v=Rv
(2)
将已知的5个向量分别旋转,记为lf、rf、ff、bf、rbf,其中,旋转矩阵R如式(3)所示:
(3)
经过上述旋转变换后回转平台与水平面的几何关系改变,在调横滚角时需要先对横滚角进行修正。使用式(4)修正θh:
(4)
由于坐标系固定,而回转平台与xoy平面不再平行,旋转轴应当选取回转平台上与x轴方向共面的中轴线,定义单位向量k为旋转轴:

(5)
令k=(xk,yk,zk)T,则旋转矩阵R如式(6)所示:


(6)
将旋转后的各个向量记为lfh、rfh、ffh、bfh、rbfh,姿态调平时最高侧腿无升降运动, 即轮腿末端位置在调平过程中固定,根据实际尺寸可测得右后轮轴在坐标系中的坐标如式(7)所示:
rb0=(4, -1 710, -2 160)
(7)
回转平台4个顶点坐标可通过式(8)求得:
(8)
各轮均位于地面,则各支腿末端距地面高度为轮的半径。由于xoy平面与地面平行,在姿态调平后各点z坐标保持不变。以lf0点为例,其z坐标为-121,理想圆弧所处的平面记为α,其法向量为ffh,平面α与对应的支腿铰接点间距为初始状态下各支腿向量的y坐标,在摆动机构摆至与行驶方向平行时,该值为619。在平面α上可确定一点tlf,该点坐标如式(9)所示:

(9)
将平面α表示为解析形式,如式(10)所示:
Ax+By+Cz+D=0
(10)
根据法向量的性质,可令(A,B,C)T=ffh。将tlf代入式(10),可解得
D=-tlf·ffh
(11)
令lf0=(xlf0,ylfo,zlf0),lf1=(xlf1,ylf1,zlf1),则两点间距满足式(12):
|lf1-lf0|=|lf|
(12)
经实测得|lf|=1 255,代入zlf0=-121,可得
(13)
在方程组(13)中仅有两个未知数xlf0、ylf0,若该方程组有解,即可确定lf0点在坐标系中的位置。同法可解得rf0、lb0。
姿态调平规划的结果为各升降油缸的伸缩量,所以还需要通过支腿目标位置求解上述调平结束后支腿的关节角。仍以左前腿为例,调平后的向量如式(14)所示:
lf=lf0-lf1
(14)
将向量lf分解为升降机构分向量lfsj与摆动机构分向量lfbd。求解升降机构的关节角时,首先需要消除摆动机构产生的分向量,该分向量为向量lf在向量f或向量b的投影:

(15)
左前腿升降关节角如式(16)所示:
(16)
同法可解得θrf、θlb。
3 仿真验证
本文中仅涉及目标位置解算,仿真验证的内容为行走底盘处于姿态调平规划的目标位置时,回转平台的位姿是否到位,以及4条支腿是否共面。
首先使用UG工具测量图纸,得到各个向量与坐标点的初值,使用Matlab工具实现上述算法,分别输入多组俯仰角与横滚角得出规划结果,再使用UG绘制,如图3所示,每张图上半部分为主视图,表示横滚角,下半部分为左视图,表示俯仰角:
从图3可以看出:各支腿末端位置共面,回转平台在目标位置调节方向与调节量正确,通过对模型的测量,角度误差较小。通过人工操作在水平地面采集了一组实际数据,使用姿态传感器测出俯仰角与横滚角后取负值代入Matlab程序,得到仿真数据与实际数据的对比,结果如表2所示。
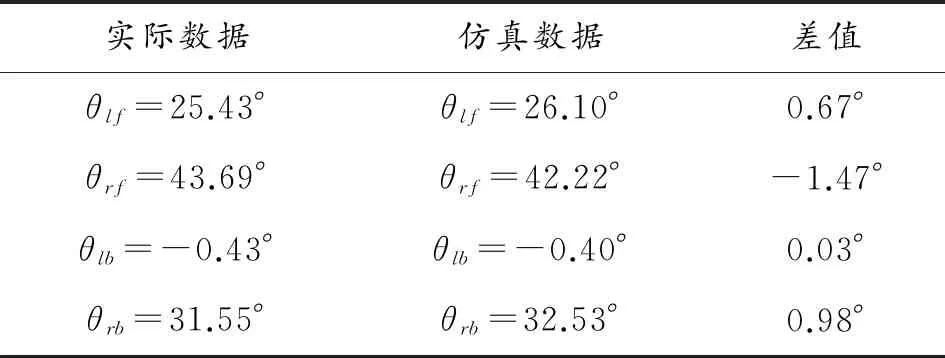
表2 实际数据与仿真数据
从表2可以看出误差较小,结果基本正确,满足实际工作的需求。

图3 目标位置仿真结果
4 结论
步履式挖掘机行走底盘是一种并联机构,其姿态调平规划包含大量的角度计算。笔者在进行逆解时使用向量对行走底盘的角度进行描述,在计算目标位置时先满足角约束条件,再按照铰接关系确定整个车体模型,最后使用向量计算关节转角。该方法仿真结果正确,易于理解,可通过修改向量与各坐标点的初值应用在不同型号、尺寸的步履式挖掘机行走装置,具有较好的应用前景。如何运用文中所得的结果进行轨迹规划与跟踪控制,是下一步重点研究的课题。
[1] 张鑫.智能型步履式挖掘机动态稳定性分析[D].大庆:东北石油大学,2014.
[2] 王进,王树彦,步履式液压挖掘机的发展概况[J].建筑机械化,2002(3):17-19.
[3] 张云.一种步履式挖掘机的设计与研制[D].西安:长安大学,2016.
[4] 王福德,寇智慧,张云.基于ADAMS的灾害救援步履式挖掘机姿态规划与越障分析[J].建筑机械,2014(11):71-74.
[5] 王晓星.用球面向量法解机械手逆运动学问题[J].机器人,1988,2(1):1-8.
[6] 徐岩,段星光.轮腿式机器人的姿态耦合优化控制[J].中国机械工程,2016(2):427-432.
[7] 魏宇明,陈秀峰,张云.ET80型步履式挖掘机[J].建筑机械,2014(11):4-7.
[8] 邬俊奇,张云,施晓明,等.某型步履式挖掘机步行式底盘自由度分析[J].工程机械,2015(4):39-45.
[9] 施晓明,梁滨.ET111型步履式液压挖掘机[J].建筑机械,2015(11):46-48.
[10] JOHN.J.CRAIG,贠超.机器人学导论[M].北京:机械工业出版社,2006.
(责任编辑杨继森)
AttitudeAdjustmentofWalkingExcavatorBasedonVector
LIU Zichao
(Research & Development Center of Weapon Equipment information & Control, Automation Research Institute of China South Industries Group Corporation, Mianyang 621000, China)
To apply automatic control technology on walking excavator, this paper describes the angle between base and four legs by vector, and then calculates the desired location by the articulation of four legs and base. The simulation results show that the method can correctly give the desired location, and every wheel is on the ground.
walking excavator; attitude adjustment; inverse kinematics
2017-03-22;
:2017-04-25
刘子超(1994—),男,硕士,助理工程师,主要从事计算机控制技术研究。
10.11809/scbgxb2017.09.024
format:LIU Zichao.Attitude Adjustment of Walking Excavator Based on Vector[J].Journal of Ordnance Equipment Engineering,2017(9):117-120.
TJ812.2
:A
2096-2304(2017)09-0117-04
本文引用格式:刘子超.基于向量的步履式挖掘机姿态调平规划[J].兵器装备工程学报,2017(9):117-120.
