四轮转向车辆操纵稳定性分析
2017-09-27姚东强谭永营吴文文
姚东强+谭永营+吴文文


摘 要:首先介绍四轮转向的概念、基本原理及系统结构和应用;,以两自由度操纵模型为例,对四轮转向(4WS)车辆的转向特性及操纵稳定性进行分析,并与传统的前轮转向(FWS)车辆进行比较;最后,给出了一个关于车辆质心侧偏角和横摆角速度的线性两自由度分析模型。
关键词:四轮转向;前轮转向;操纵稳定性;横摆角速度
DOI:10.16640/j.cnki.37-1222/t.2017.19.001
0 引言
从上世纪八十年代开始,后轮转向控制律的研究逐步兴起,对四轮转向车辆来说,当车速较低时,为了减小转向半径,通常使后轮转向方向與前轮相反;当高速行驶时,为了提高车辆的稳定性,后轮将产生与前轮同向的转向角。四轮转向的基本原理是:利用车辆行驶中的某些信息来控制后轮的转角输入,以提高车辆的操纵稳定性。本质上讲,四轮转向的优点主要是系统对后轮轮胎侧向力独立控制的能力。由于四轮转向车辆可同时改变前后轮的侧偏角和轮胎侧向力,因而可提高车辆的瞬态响应,并改善车辆的转向控制能力。下面采用两自由度单轨模型,在线性域内对4WS系统进行动力学分析。
1 四轮转向车辆的动力学模型
四轮转向车辆的操纵动力学原理见图1。通常、、、较小,因此有
COS=,COS=,tan=,tan=。在此假设汽车质心出沿前进方向速度u与车辆侧向速度v相比很大,可看做常量,轮胎切向力及迎风阻力不计,则根据受力关系,可建立如下方程:
采用前后轮转向比c为定值的控制方式,即将控制目标设为使车辆转向时其质心侧偏角,可导出稳态条件下车辆质心侧偏角时前后轮转向比c应满足的条件。按照几何定义:,因而令,同时消去存在的项,就得到稳态条件下车辆质心侧偏角时c应满足的条件:
上式说明,车辆在高速工况行驶时后轮应与前轮同方向转向;而低速时后轮应与前轮反方向转向。
2 前轮角阶跃输入下的稳态响应分析
汽车等速行驶时,前轮角阶跃输入下的稳态响应可用稳态横摆角速度增益来评价。令方程(12)中的动态项和为0,使输入项即前轮转角为定值,即可解出输出项,即稳态响应,这时车作等速圆周行驶。即:
当稳定性因数K=0时为中性转向,K>0时为不足转向,K<0时为过多转向。与前轮转向相比,在高速行驶时,c>0,横摆角速度增益减小,转向灵敏度降低,可提高车辆操纵稳定性;在低速时,c>0,横摆角速度增益增加,转向灵敏度增加,则使汽车操纵更为灵活。
3 时域响应分析
汽车的操纵稳定性同汽车行驶时的瞬态响应有密切关系。现以稳态转向时车辆质心侧偏角等于0为控制目标的四轮转向车辆为例进行仿真分析。车辆具体参数如下:
利用(13)式,在Simulink下建立角阶跃输入下车辆横摆角速度的时域响应仿真框图。
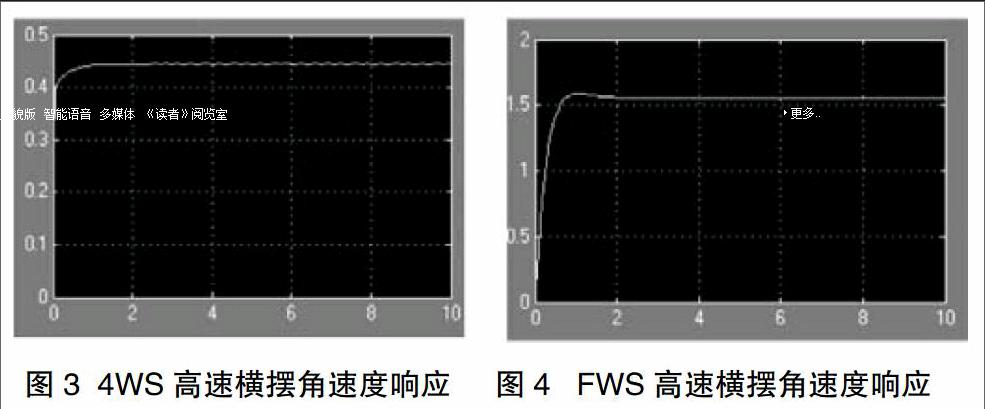
这里主要针对高速工况进行分析。仿真框图中对速度取值为25m/s。前轮角阶跃输入取15°,仿真时间设为10秒。仿真结果如下图所示:
从以上两图对比发现,高速时,前后轮同方向转向的4WS车辆横摆角速度峰值和稳定值要远小于FWS车辆,且瞬态响应时间也比FWS车辆要小,由此说明高速转向行驶时,4WS车辆比FWS车辆具有更好的转向特性。
4 频域响应分析
利用MATLAB求解系统的幅频响应和相频响应。幅频特性反映了不同频率输入时,汽车本身失真的程度。相频特性反映了汽车横摆角速度滞后于前轮转角的失真程度。
由图5、图6可以看出,低速时,4WS车辆横摆角速度增益大于FWS的车辆,而高速时4WS则小于FWS,即刚好相反。从相频特性看,而这相位变化相差很小,且随着频率增加,变化趋势接近相同。
5 结论及展望
根据以上理论和仿真分析表明:首先,高速时,4WS车辆横摆角速度低于FWS车辆,提高了转向稳定性;低速时,4WS车辆横摆角速度高于FWS车辆,提高了车辆的机动性;其次,通过合理选择比例系数,4WS车辆几乎完全实现了车辆转向过程中的零侧偏角;最后,从车辆横摆角速度频率特性来看,4WS车辆有效改善了系统的滞后。
但同时,本4WS车辆模型也有不足之处。首先,中高速时,4WS车辆的横摆角速度增益要低于FWS车辆,这会加重驾驶员的负担;其次,本车辆模型是基于线性考虑的,而实际车辆本身则具有非线性的特性;最后,实际中车辆的载荷及运动状态会变化,且质心位置也并不固定,因此实际中前后轮转向比系数c并不是固定的。
参考文献:
[1]余志生.汽车理论[M].北京:机械工业出版社.
[2]刘豹.现代控制理论[M].北京:机械工业出版社.
[3]喻凡.汽车系统动力学[M].北京:机械工业出版社.
[4]杨叔子等.机械工程控制基础[M].武汉:华中科技大学出版社.
[5]王正林等.MATLAB/Simulink与控制系统仿真[M].电子工业出版社.
[6]舒进.四轮转向车辆运动仿真分析[J].汽车技术.
作者简介:姚东强(1992-),男,河南信阳人,硕士研究生在读,研究方向:车辆总体技术。endprint
