一种新型变胞机构的拓扑结构变换
2017-09-23叶兵李洪汉韦为
叶兵,李洪汉,韦为
一种新型变胞机构的拓扑结构变换
叶兵,李洪汉,韦为
(广西大学机械工程学院,广西南宁530004)
变胞机构是机构中一种特殊的形式,具有改变结构和改变功能的特点。本文基于对机构的变胞机构的几何与拓扑分析,开发出新的变胞构型,从而进行分析。在文章中采用矩阵变换的运算方法,通过分析一个全新的构型,建立相应的数学模型,最后得出终态的拓扑结构以及相应的邻接矩阵,并且深刻地揭示了变胞机构的实质及其演变的规律。
变胞机构;拓扑分析;模型;邻接矩阵
自从1998年25届ASME机构学与机器人学双年会上首次提出变胞机构以来,经历了十几年的发展,变胞机构的相应理论已经日趋成熟。同时,变胞机构的发展也使得机器人的发展被推向一个新的台阶。通过不断地发展,变胞机构的实质也逐渐被揭开,变胞机构在变换的过程中发生了构件的相互结合重组,同时新构件的自由度也发生了变化。由于变胞机构的灵活变换和重组的特点而为传统的机械设计打开了一个新的思路。变胞机构不仅在机器人行业有着广泛的应用前景,同时也较多的应用于航天事业之中。此前,英国伦敦大学国王学院的戴建生就发明了一种变胞的机械手,可以用于机器人;而北航也通过不断地努力开发出了火星变胞探测车,这些研究都为进一步发展变胞机构提供了现实依据[1-5]。
1 变胞机构的构态变换
1.1 整体结构设计
通常变胞机构的获得有两种途径,一种是通过生活中的折纸艺术来折叠出符合要求的机构,另一种是通过几何分析与旋量原理来获得变胞机构。本文将着重于讲述通过折叠纸张的方法来获得变胞机构。
对于通过折纸工艺所得到的机构,可以清晰地看到在此过程中机构的构态及其自由度不断地发生变化。所以,变胞机构的本质就是构态及自由度的改变。正如以上所述,此处以一个变胞机构为例,并且对此机构的初态和终态的构态进行分析,此机构是从折纸中所获得,而此构型为一个带门的折叠帐篷,如图1所示为折叠帐篷的立体图,而A为此帐篷的门。

图1 折叠帐篷的立体图
现在为了有效地研究此构型的变胞过程以及拓扑结构,故进行以下分析,同时绘制初态变胞机构的结构图拓扑图以及处于始态时的折纸结构图。如图2所示的(1)(2)(3)分别为初态变胞机构的结构图、相应的拓扑图以及处于初态时的折纸结构图。
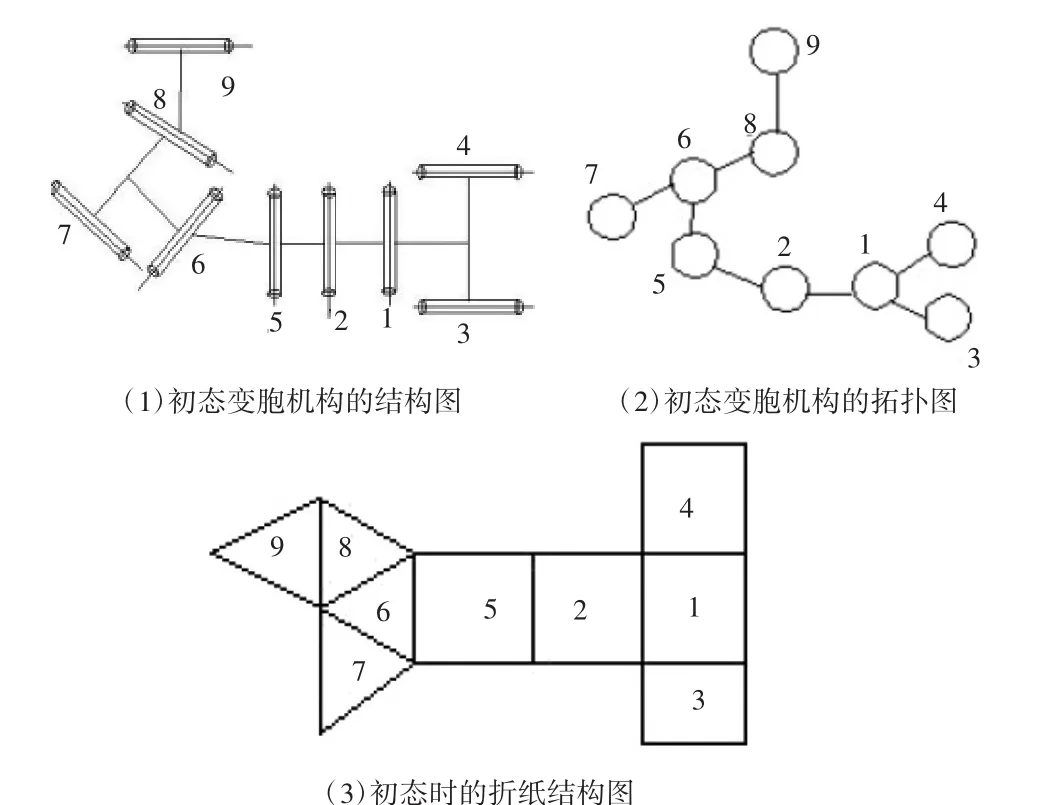
图2 初态变胞机构
在此变胞机构之中,变换前由9个部分组成,随着机构杆件的变换而不断的发生变化。此外,可以在此处定义每两个构件之间的连接所需要的运动副为转动副。所以变胞机构再连接的过程实质上就是结构和自由度变化的过程的重要体现。那么,在该结构的初态结构中有9个部分组成,即活动构件的数目N= 9,共有8个转动副即低副数目PL=8,高副数目Ph= 0,所以根据公式自由度F=3n-2PL-Ph,代入数据可得F′=3×9-2×8=11,即初态是变胞机构的自由度为11.并且,在此处为了能清晰的表达各个杆件之间的连接关系,所以用矩阵的形式来表示。此处令初态变胞机构的邻接矩阵为A0,则有:

在第一次变换时,首先分别让杆件3和杆件4与杆件2连接合并,合并之后得到第一构态,并且变胞机构的结构图和相应的拓扑图也都会随着发生变化。其变胞机构的结构图和相应的拓扑图分别如图3中第一初态所示。

图3 第一构态中构件图与拓扑图
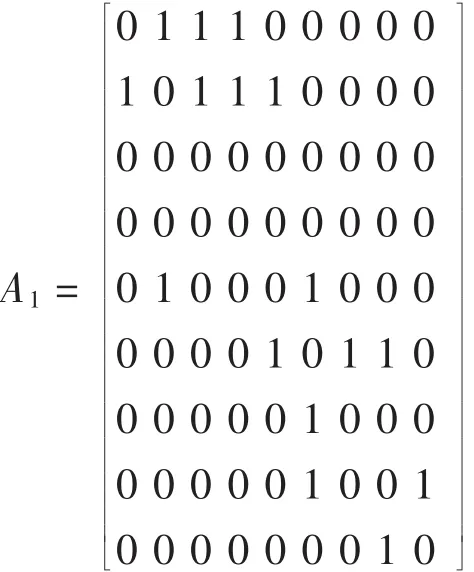
此时杆件3和杆件4的连接关系便已经转移到了杆件2上面,为了更好地表示出新的连接关系,在矩阵中将杆件3和杆件4的行元素和列元素全部添加到杆件2的行和列上面,并且将原来的杆件3和杆件4的行元素和列元素全部置为0,表示原有的杆件3和原有的杆件4的连接关系不存在,而以新的连接关系来代替,这就便得到了第一构态的邻接矩阵,邻接矩阵的获得必须要借助于矩阵的一系列初等变换来实现的,根据这些便可以写出第一构态的邻接矩阵。其中:
其第一构态的空间结构图如下图4所示。
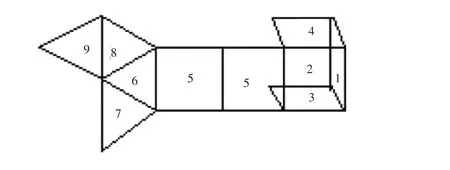
图4 第一构态的空间结构图
1.2 变胞机构的构态变换
接下来为了获得第二构态,就需要进一步的连接变换以便于产生新的连接关系。如上所述,要将构件5与构件3和构件4相连接,到此就完成了变胞机构底部的连接了。所以为了便于计算,故将底部的构件1,2,3,4,5视为一个构件,并且用构件1’来代替,而杆件6,7,8,9也分别用2’、3’、4’和5’来代替。此时第二构态也随即产生了。如图5所显示为第二构态的构件图与拓扑图。
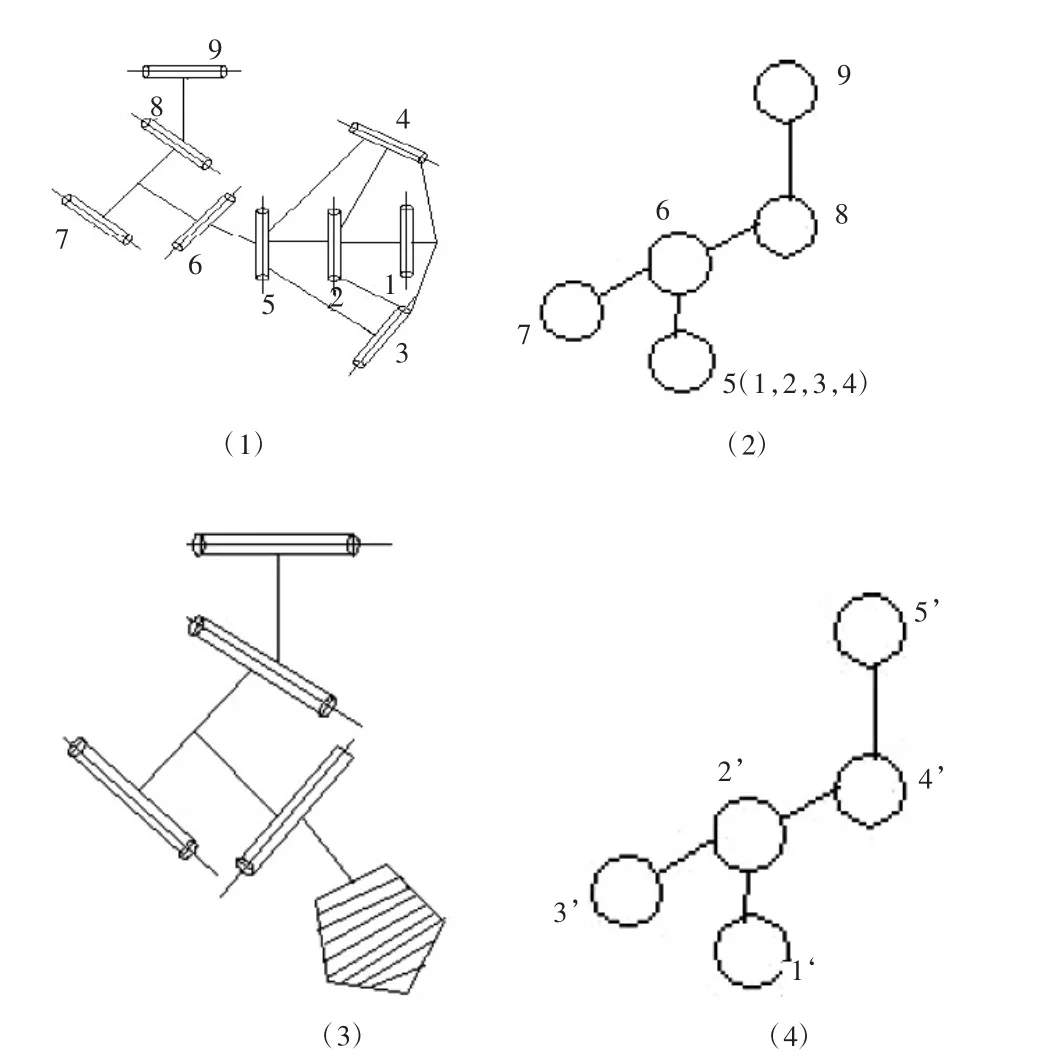
图5 第二构态中变化前后的构件图与拓扑图
如前面的方法所示,也可以写出经过变化后的变胞机构第二构态的邻接矩阵A2.由于已经将其中构件1,2,3,4,5合并为一个构件,所以A2已经变成一个5×5阶的矩阵。其中:

其第二构态的空间图如图6所示。

图6 杆4’与杆1’合并后的构件图与拓扑图
若对此变化过后的第二构态进行自由度的计算,并且将构件1’视为机架,即不可动的构件则有F=3N-2PL-Ph=3×4-2×4-0=4,此式表明该构型的第二构态有4个自由度。而后为了完成机构的变换还需要分为2步来进行。其2个步骤分别为:4’杆与1’合并如图7所示,杆3’与5’合并,如图8所示。
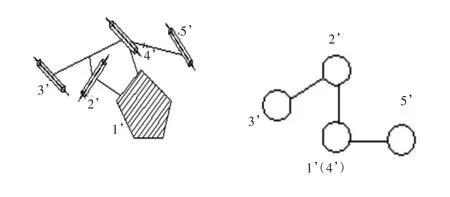
图7 杆4’与杆1’合并后的构件图与拓扑图

图8 杆3’与杆5’合并后的变胞机构第四构态的构件图与拓扑图
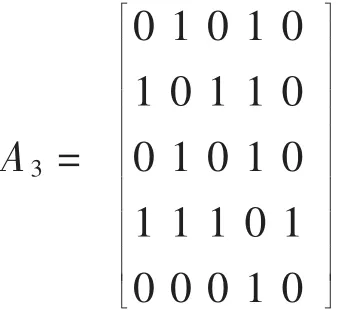
此时机构的邻接矩阵发生了变化,由A2变成了A3,其中A3也是一个5×5阶的方阵,如下所示。
其空间构态图如下图9所示。

图9 第三构态空间结构图
若对此机构进行自由度的计算,则有F=3n-2PL-Ph=3×2-2×2=2,此式表明此机构的自由度为2.
在经过以上各个步骤后,就得到了变胞机构的终态结构,并由以上的一个帐篷机构可知,变胞机构变换从本质上就是机构自由度以及拓扑机构变化的过程。因此,通过采用观察构件图与拓扑图的方法可以有效地预测每一步变胞机构所得到的新构型,并可以通过文中所述的折纸得到变胞机构的方法将其延伸到机械的各个领域,有利于新的机构的开发与科学研究。
2 结论与分析
本文利用自主设计的变胞机构,通过不断的杆件合并最终形成了完整的立体帐篷模型。在杆件的合并过程之中主要运用变胞机构的拓扑分析原理来实现,然后经过反复的变换,实现了变胞机构的构态变换,经过分析,得到以下结论:
(1)变胞机构的构态变换实际上就是机构的拓扑结构以及自由度发生变化的过程,每次从一个构态过渡到下一个构态,自由度都相应的减少。
(2)利用邻接矩阵来表示的方法能够清楚的描述机构之间的连接关系与拓扑结构,便于实现变胞机构的变换。
[1]李瑞玲,戴建生,张启先,等.基于构态变换的变胞机构综合[J].机械工程学报,2002,38(7):35-38.
[2]L i D L,D a i J S,S un H.Configuration based synthesis of aCarton-like metamorphic mechanism of foldable and erectable. Journal of Engineering Design,2005,16(4):375-386.
[3]杨廷力,沈惠平,刘安心,等.机构自由度公式的基本形式、自由度分析及其物理内涵[J].机械工程学报,2015,51(13):69-80.
[4]王德伦,戴建生.变胞机构及其综合的理论基础[J].机械工程学报,2007,43(8):32-42.
[5]王汝贵,戴建生.一种新型平面-空间多面体可重构变胞机构的设计与分析[J].机械工程学报,2013,49(11):29-35,42.
TheTopology Change of a New Type of Variable Cell Organization
YE Bing,LI Hong-han,WEI Wei
(College of Mechanical Engineering,Nanning Guangxi 530004,China)
The variable cell mechanism is a kind of special form,has the characteristics of change structure and function.In this paper,based on the change of body cell body geometry and topology analysis,developed a new variable cell configuration,which is analyzed.Matrix computing method is used in the article,by analyzing the configuration of a new,establish the corresponding mathematical model,finally it is concluded that the topological structure of the final state and the corresponding adjacency matrix,and profoundly reveals the essence of the cell organization and evolution of the rules.
variable cell mechanism;topology analysis;model;adjacency matrix
TH112.1
A
1672-545X(2017)07-0023-04
2017-04-07
叶兵(1991-),男,安徽滁州人,硕士研究生,研究方向:机械创新设计,机构学。
