转向器试验台液压位置伺服系统建模与仿真
2017-09-20陈永芝麦云飞
陈永芝,麦云飞
(上海理工大学 机械工程学院,上海 200093)
转向器试验台液压位置伺服系统建模与仿真
陈永芝,麦云飞
(上海理工大学 机械工程学院,上海 200093)
随着对汽车安全性以及舒适性要求的提高,汽车厂商对于负载模拟系统的动态响应和控制精度也有了更高的要求。在电机控制系统中,参数的突变会引起试验台的稳定性降低并且伴有震荡产生。为克服震荡,文中使用伺服控制液压马达模拟EPS的方向盘系统以及负载系统代替原有的电机控制。通过Simulink仿真得到的系统阶跃响应图和Bode图分析发现,该试验台液压系统闭环稳定,且在一定程度上克服了震荡现象,具有可借鉴性。
试验台; 液压位置伺服系统;建模;Simulink仿真
汽车转向器、发动机、车轮以及制动系统都属于汽车的“心脏”[1]。汽车转向器是决定汽车整体质量的关键部件,对汽车稳定性、舒适性、安全性起着至关重要的影响[2]。转向器试验台是汽车转向器功能测试和疲劳试验的设备,其主要作用在于对转向器进行疲劳测试、质量检测和性能分析。通过测试可以克服现场试验中存在的费用高、耗时长以及重复性较差的特点[3]。
在电机控制中参数的突变会引起试验台的不稳定并且伴有震动产生,为克服此种现象,本文涉及的试验台一端采用马达在一定范围内作往复摆动模拟转向器的实际工作状态,另一端采用马达模拟负载情况,利用液压的连续性在一定程度上克服了电机参数突变系统不稳定以及震动的现象。
1 EPS试验台系统组成原理
该转向器试验台分为方向盘模拟系统、负载模拟系统及被测件EPS3部分。如图1所示,方向盘模拟系统由液压马达、联轴器、扭矩传感器及联轴器组成,方向盘模拟系统的液压马达根据设定的角度信号θ输出期望的角度,并通过联轴器和扭矩传感器等作用在被测件EPS上;负载模拟系统由液压马达、联轴器、扭矩传感器及联轴器组成,根据系统给定的扭矩信号T输出期望的扭矩信号,经扭矩传感器、联轴器等与方向盘模拟系统同时作用在被测件EPS上;被测件EPS由转向输入轴、中间轴、助力电机、蜗轮蜗杆减速机构和电子控制单元ECU等组成。其工作原理为:电子控制单元ECU根据车速传感器测得的车速信号和扭矩传感器测得的扭矩信号,控制助力电机的旋转方向和助力电流的大小,实现EPS的助力转向控制[4-5]。

图1 转向器试验台系统组成
2 位置控制液压伺服系统建模
2.1 伺服阀模型分析
试验台选用MOOG品牌的G761-3005伺服阀,该伺服阀为先导型流量控制阀,具有高性能的两阶设计以及结构简单、工作稳定、使用寿命长、可靠性强等优点[6]。其主要参数为:负载流量63 L/min;最大工作压力31.5 MPa;阀的设计压降7 MPa;内泄漏2.4 L/min;控制电流40 mA。因为该伺服阀的固有频率ωsv=660 rad/s,为简化伺服阀的传递函数,可用二阶振荡环节表示[7]

(1)
式中,伺服阀的固有频率ωsv=660 rad/s;伺服阀阻尼比ξsv=0.7;伺服阀流量增益系数Ksv=5.57×10-2(m3/s)/A。
2.2 阀控液压马达模型
实验台选用的液压马达为Duesterloh的KM110ZA1VM。该液压马达为径向柱塞式液压马达,具有优良的静压驱动运行特性,噪音低、使用寿命长[8]。
为建立其数学模型,首先写出阀控液压马达的3个基本方程的拉氏变换式[9]:
(1)滑阀的流量方程
QL=KqXv-KcpL
(2)
(2)马达的流量连续性方程

(3)
(3)输出力与负载力的平衡方程
PLDm=Jts2θm+Bmsθm+Gθm+TL
(4)
经过计算可得出四通阀控液压马达的基本方程[10]

(5)
其中,液压油弹性模数βe=7×108Pa;液压马达理论排量Dm=17.50×10-6m3/rad;有效容积Vm=1×10-4m3。
经简化,其传递函数为

(6)

2.3 伺服放大器环节
伺服放大器一般可视为一个比例环节,其数学模型为
I=KaE=Ka(Ur-Uf)
(7)
式中,Ka为伺服放大器系数;Ka=50 A/V;I为放大器输出电流;Ur为指令电压信号;Uf为反馈电压信号。
2.4 力矩传感器环节
一般传感器的传递函数可以近似的按比例环节考虑,其数学模型为
Uf=Kfθ
(8)
式中,Uf为反馈信号;Kf为反馈系统增益系数;θ为角度信号。
2.5 EPS转向器的数学模型
试验台中,EPS管柱也是系统的组成部分,因此需要考虑管柱的数学模型,管柱的传递函数可以表示为[11]

(9)
式中,G为减速机构减速比;r为齿轮半径。
2.6 电液角度控制系统方框图
通过对比以上各部分分别建模,根据系统组成,建立如图2所示的框图。
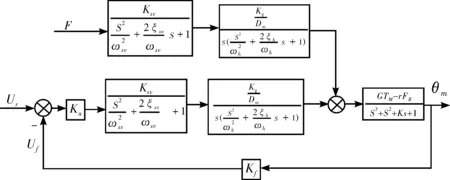
图2 EPS疲劳试验台方向盘模拟系统方框图
从方框图中可以清楚的了解EPS液压位置伺服系统的模型由方向盘模拟系统以及负载模拟系统组成。在给定信号Ur和干扰信号F的作用下,输出量θ为
(10)
3 Matlab仿真
为了解系统的特性,利用Matlab的Simulink模块对系统进行时域和频域分析[12]。根据上述数学模型,并添加PID对系统进行调节,可绘制出系统的仿真模型如图3所示。

图3 转向器试验台系统的Simulink仿真模型
通过调节各项参数,使系统达到最佳设计要求。既要满足系统的快速性,也要满足系统的快速性和精确性的要求[13]。较大的剪切频率ωc可提高系统的快速性,较大的开环增益Kv可提高系统的控制精度,但两者都受固有频率ωh的限制,因此需要调试各项参数使其达到最佳值。通过调节,此时系统的阶跃响应如图4所示。[14]

图4 单位阶跃响应仿真结果
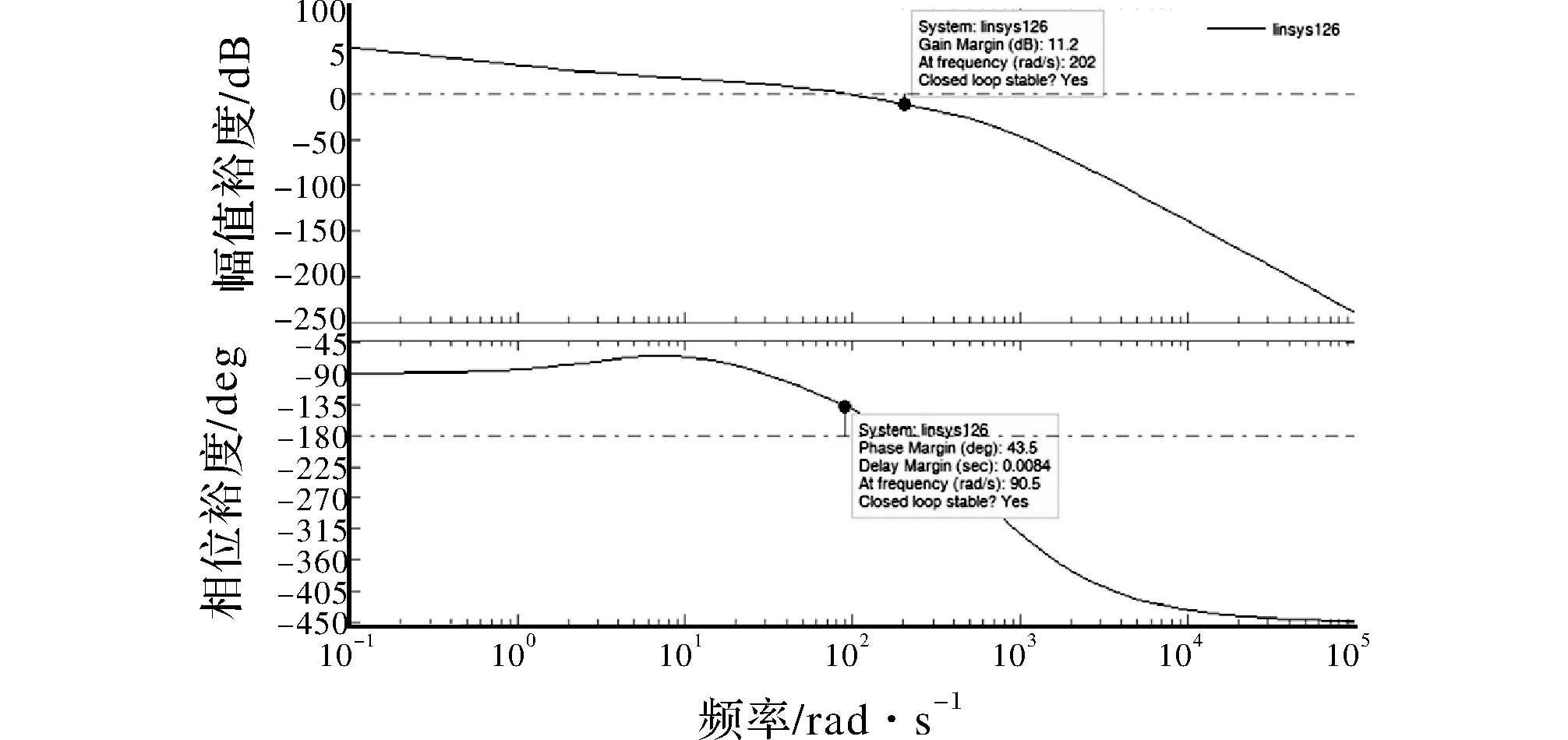
图5 开环系统Bode图

图6 闭环系统Bode图
从如图5所示的开环频率特性可以了解到,系统的幅值裕度为11.2 dB,相位裕度为43.5°,满足控制设计的常用准则[15]。从图6的闭环频率特性分析可以看出,闭环系统的截止频率ωd=40.4 rad/s,幅值裕度Kg=8.36 dB,从仿真结果可以看出,该系统能够实现闭环稳定。
4 结束语
针对电机控制中参数的突变会造成试验台不稳定以及引起试验台的震荡问题,该转向器试验台采用液压伺服控制系统进行改进。通过对该试验台液压伺服控制系统的仿真结果表明:该系统是稳定的,且可以在一定程度上改变电机伺服控制中因参数突变引起的系统震荡现象。
[1] 王杰.电控液压助力转向器(EHPS)的助力特性研究[D].重庆:重庆理工大学,2014.
[2] 杨文畅.循环球式液压动力转向器复合加载测试系统[J].科技创新与应用,2016(18):119-121.
[3] 张彪.电液负载模拟器多余力矩抑制及其反步自适应控制研究[D].哈尔滨:哈尔滨工业大学,2009.
[4] 麦云飞,程奇.基于AMESim/Simulink的液压位置伺服系统仿真[J].机械工程与自动化,2015(2):59-61.
[6] Moog.Moog G761/761 series flow control servo values[M].America:Moog,2014.
[7] 黎良思,黄义萍,王志翔.模糊控制在液压闭环同步系统中的应用研究[J].电子科技,2015,28(11):147-149,153.
[8] Duesterloh.Duesterloh precision drives series KM 11- RM 250N [M].Germany:Duesterloh,2014.
[9] 王春行.液压控制系统[M].北京:机械工业出版社,1999.
[10] 刘佳晨,麦云飞.转向器试验台角度控制液压伺服系统建模与仿真[J].液压气动与密封,2012(10):31-34.
[11] 刘丹丹,骆艳洁,麦云飞.EPS疲劳试验台电液位置系统建模与分析[J].通信电源技术,2015(5):87-89.
[12] 吴新余,周井泉,沈元隆.信号与系统--时域、频域分析及Matlab软件的应用[M].北京:电子工业出版社,1999.
[13] 李洪人.液压控制系统[M].北京:国防工业出版社,1991.
[14] 吴新余,周井泉,沈元隆.信号与系统--时域、频域分析及Matlab软件的应用[M].北京:电子工业出版社,1999.
[15] 邢宗义,张媛,侯远龙,等.电液伺服系统的建模方法研究与应用[J].系统仿真学报,2009(6):1719-1725.
Modeling and Simulation of Hydraulic Position Servo System for Steering Test Bench
CHEN Yongzhi,MAI Yunfei
(School of Mechanical Engineering,University of Shanghai for Science and Technology,Shanghai 200093,China)
With the improved requirements of the safety and comfort for motor vehicle, automakers pay more attention to the dynamic response and accuracy of the loading simulation system. In the motor control system, the mutation of parameters can reduce the stability of test-bed accompanied with shock. Testing the EPS according to the real situation by hydraulic motors which controlled by servo valve can reduce the shock. According to the step response of the system diagram and Bode diagrams, it is verified that hydraulic system is closed-loop stability. It can be used for reference.
test bench;hydraulic position servo system; modeling; Simulink
2016- 09- 21
陈永芝(1992-),女,硕士研究生。研究方向:液压伺服控制系统。麦云飞(1962-),男,博士,副教授。研究方向:液压伺服控制系统。
10.16180/j.cnki.issn1007-7820.2017.09.039
TP391.9;TH137
A
1007-7820(2017)09-146-03