基于当前模型自适应改进的航迹跟踪算法
2017-09-20崔龙飞吴晓朝张才坤
崔龙飞,张 星,吴晓朝,张才坤
(洛阳电子装备试验中心 研究所,河南 洛阳471000)
基于当前模型自适应改进的航迹跟踪算法
崔龙飞,张 星,吴晓朝,张才坤
(洛阳电子装备试验中心 研究所,河南 洛阳471000)
在航迹跟踪过程中,目标发生转弯、变加速等强机动行为,会导致传统"当前"统计模型的跟踪精度变差,通过提取残差新息序列和测量方差序列中的信息,分别在"当前"统计模型中添加机动频率、最大加速度自适应修正因子,以及在卡尔曼滤波框架中增加协方差自适应因子,改善了该算法对强机动目标跟踪的适应能力。通过改进,该算法即保持了对一般机动目标良好的跟踪特性,又提高了对强机动目标的跟踪性能。通过使用蒙特卡洛模拟仿真验证了改进算法的有效性。
航迹融合;“当前”统计模型;卡尔曼滤波;新息差序列;方差自适应
航迹跟踪在军事领域有着广泛的应用和重要的地位,尤其是在空情信息融合系统中,更是空情融合等后续处理的前提和基础。由于测量误差的不可避免、目标运动模式可能发生的变化,航迹跟踪算法在对目标运动进行预测时需要适应不同的机动情况。目前航迹跟踪系统一般采用在自适应滤波体系的框架基础上,利用运动模型对目标运动的下一时刻位置进行估计,实现对目标的跟踪。当目标发生机动时,改进运动模型和滤波算法与目标实际的运动模式的匹配度是提高航迹跟踪精度的关键。
“当前”统计模型(Current Statistical Model,CSM)[1]是通过改进Singer模型[2]而得到一种目标机动模型,它假定机动目标下一时刻的加速度只能在“当前”加速度的邻域范围内,从而将Singer模型中加速度零均值改进为自适应的加速度均值,使得跟踪精度和性能得到较大的提高,实际应用中证明这种对于目标机动状况的描述较为合理,获得了广泛的应用[3]。但同时,传统的“当前”统计模型算法性能的发挥受到两个因素影响,第一,它依赖于模型本身需要预先设定的两个参数:机动频率和最大加速度,当两者取值较大时,跟踪匀速机动目标和较小加速度的机动目标性能差于匀速模型(Constant Velocity,CV)[4]、匀加速模型(Constant Acceleration,CA)[5]和Singer模型[2];而若两者取值较小,跟踪突发强机动目标时其收敛速度较慢,算法的实时性降低,并且一旦目标机动超过预先设定的值,其跟踪性能将明显恶化;第二,“当前”统计模型是建立在卡尔曼滤波框架[6]的基础上的,当目标运动模式较为平稳时,卡尔曼滤波也达到稳态时,其预测协方差、滤波器的增益也趋于极小值。此时,如果状态发生突变,就会导致残差增大,但预测协方差和滤波器的增益并不能随残差同步改变,从而丧失对突变状态的跟踪能力。
就上述存在的问题,目前已经有了一些有益的改进。针对第一个问题,裕成新等提出自适应的最大加速度模型集合变结构交互多模型方法[7];刘昌云等提出利用残差进行假设检验进而调整模型中目标的机动频率[8]。前者需要设计适当的最大加速度模型集合,并且使用多模型不仅增加了计算复杂性而且模型间的竞争也降低了跟踪性能;后者仅考虑了机动频率忽视了最大加速度的影响;针对第二个问题,周东华等人提出了一种强跟踪滤波器[9],通过迫使输出的残差序列近似正交,使得滤波器具有自适应在线校正估计偏差和迅速跟踪状态变化的能力。由于它一方面忽视了机动模型与目标系统模式之间误匹配带来的影响,另一方面计算渐消因子时需要预先通过仿真设定一个适当的衰减因子,使得该算法的普适性不强。
本文针对强机动目标航迹跟踪这一问题,综合考虑“当前”统计模型和卡尔曼滤波框架,对两个影响因素同时进行自适应改进。首先,通过定义测残差的统计距离,将目标的机动状态划分为一般机动和强机动,依据目标的机动状态调整“当前”统计模型中的机动频率,提出AMCSM(Adaptively Modified CSM)算法;然后借鉴强跟踪滤波器思想,在卡尔曼滤波器的协方差矩阵中引入协方差自适应因子,提出AFKF(Adaptively Fading Kalman Filter)算法,最后,通过综合两种方法,改进对强机动目标航迹跟踪的性能,提出了AMCSM-AFKF算法。
1 参数自适应改进
1.1 CSM算法
“当前”统计模型是一种非零均值时间相关模型。该统计模型假设:当目标正在以某一加速度机动时,那么目标加速度下一时刻的取值只能在“当前”加速度的邻域内。该模型用修正的瑞利分布来描述机动加速度的“当前”概率密度,用“当前”加速度预测值表示加速度均值,随机机动加速度在时间轴上仍符合一阶时间相关过程[10]。即
(1)


(2)
其中,T为采样周期。
基于“当前”统计模型的方差自适应算法,即是按下式自适应调整方差[12-13]

(3)
上式中,各变量如下所示
q11=(1-e-2αT+2αT+2α3T3/3-
2α2T2-4αTe-αT)/2α5
(4)
q12=(1+e-2αT-2e-αT+α2T2+
2αTe-aT-2αT)/2α4
(5)
q13=(1-e-2αT-2αTe-αT)/2α3
(6)
q22=(4e-αT-3-e-2αT+2αT)/2α3
(7)
q23=(e-αT+1-2e-αT)/2α2
(8)
q33=(1-e-2αT)/2α
(9)
(10)
其中,amax为最加速度最大值。
观测方程为

(11)
其中,V(k)是均值为零;方差为R(k)的白噪声。
1.2 强机动检测及CSM-KF的自适应改进
“当前”统计模型中的主要参数状态转移矩阵和系统噪声方差受机动频率α、采样周期T和最大机动加速度amax的影响,除T由根据实际情况决定外,其它两个是影响模型的跟踪精度的关键因素。当目标以相对稳定的加速度运动时,可以选取适当α和amax,使Q(k)较小,从而保持较高的跟踪精度。但当目标突发强机动时,目标的加速度变化范围较大时,由于机动频率α和最大机动加速度amax不能自适应调整,导致系统噪声方差Q(k)无法及时调整,从而降低了跟踪目标强机动的跟踪精度,针对这一情况,本文根据滤波器的残差信息,判断系统当前的匹配程度,对“当前”模型进行自适应改进。
1.2.1 AMCSM改进算法
目标产生机动使得原来的机动模型变差,造成目标状态估计偏离真实状态,使得滤波器的残差(新息)特性发生变化。因而可以根据残差过程的变化,设计出机动检测的准则。
根据量测方程和系统状态方程,可以得到新息向量为[14]

(12)
其协方差矩阵为
S(k)=H(k)P(k|k-1)HT(k)+R(k)
(13)
则新息向量的统计距离可以表示为
d(k)=DT(k)S-1(k)D(k)
(14)
由新息序列的统计性质可知,目标量测残差的统计距离服从χ2分布,当目标作强机动运动时,新息D(k)将不再是零均值高斯白噪声,d(k)也将随之增大,因而通过设定门限值,可以判定出系统的机动方式。
设定门限值为M,当d(k)大于门限值时,认为发生了强机动,否则没有。
假设d(k)大于门限M的概率为PF,PF为允许的虚警概率,即
P{d(k)>M}=PF
(15)
通过查χ2的分布表,当PF=0.05时,M=3.8,当PF=0.1时,M=2.7。
因此,对“当前”模型的自适应改进方法如下:
(1)当 时,判定为强机动,调整机动频率和最大加速度值
α=d(k)α0
(16)

(17)
(2)当d(k)≤M时,判定为一般机动,保持参数初值不变。
1.2.2 AFKF改进框架
在经过对机动频率的修正后,系统模型与真实运动情况的匹配程度得到了有效地提高,但系统在平稳运动过程发生强机动的时候,由于卡尔曼滤波体系已经达到了稳态,滤波增益比较稳定,难以很快的进行跟踪,考虑到这一因素,本文引入协方差自适应因子,对卡尔曼滤波进行改进,具体算法如下:定义误差函数为
(18)
协方差自适应因子为
(19)
当残差新息大于协方差的时候,则认为模型出现了强机动,此时适当提高滤波器增益以增强滤波器的跟踪特性,卡尔曼滤波的其他步骤不进行改变[6]。
1.3 AMCSM-AFKF算法
根据改进的“当前”统计模型和卡尔曼滤波框架,基于机动频率和协方差自适应调整的“当前”统计模型算法步骤如下:

(20)
(2) 设定初始机动频率a0,初始加速度极值amax0。根据式(3)计算Q(k);
(3) 计算一步协方差预测矩阵P(k|k-1),其中λk-1计算方法为式(19)
P(k|k-1)=λk-1F(k-1)P(k-1|k-1)FT(k-1)+
Q(k-1)
(21)
(4) 自适应调整模型参数。当目标做一般机动时,使用初始的机动频率和最大加速度,保持原模型对一般机动目标较好的跟踪特性。
当目标发生强机动时,取PF=0.1,按照下式自适应的调整机动频率参数α和amax
α=d(k)α0
(22)
(23)
根据上述参数,重新计算噪声方差Q(k)和一步预测协方差P(k|k-1);
(5) 计算卡尔曼增益值、滤波值和协方差值
K(k)=P(k|k-1)HT(k)S-1(k)
(24)

(25)
P(k|k)=[I-K(k)H(k)]P(k|k-1)
(26)
(6) 循环计算步骤1,开始下一周期的处理。
2 仿真实验与结果分析
本文采用文献[15]中的实验方法,共对两种航迹类型进行2 000次Monte Carlo仿真,通过对比原始“当前”统计模型算法(CSM-KF)、方差补偿改进的CSM模型算法(ACSM-KF)和本文提出的自适应改进的CSM模型算法(ASCSM-AFKF)仿真结果,验证提出的算法有效性。
2.1 蛇形运动航迹
假定目标起始状态:X0=[6 000 m,500 m/s,45 000 m,0 m/s],运动过程持续300 s,采样周期为0.5 s,测量误差为700 m,测量噪声为0均值高斯分布,具体运动过程如图1所示。

图1 蛇形运动真值航迹
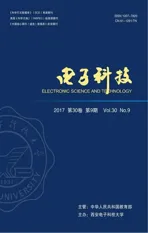
其中,某次仿真实验的结果如图2所示,其中图2(a)为原始航迹;图2(b)为方差补偿改进算法的融合航迹;图2(c)为本文提出的算法的融合航迹;图2(d)原始算法的融合航迹。
2 000次Monte Carlo后3种方法的位置的RMSE曲线分别如图3所示。

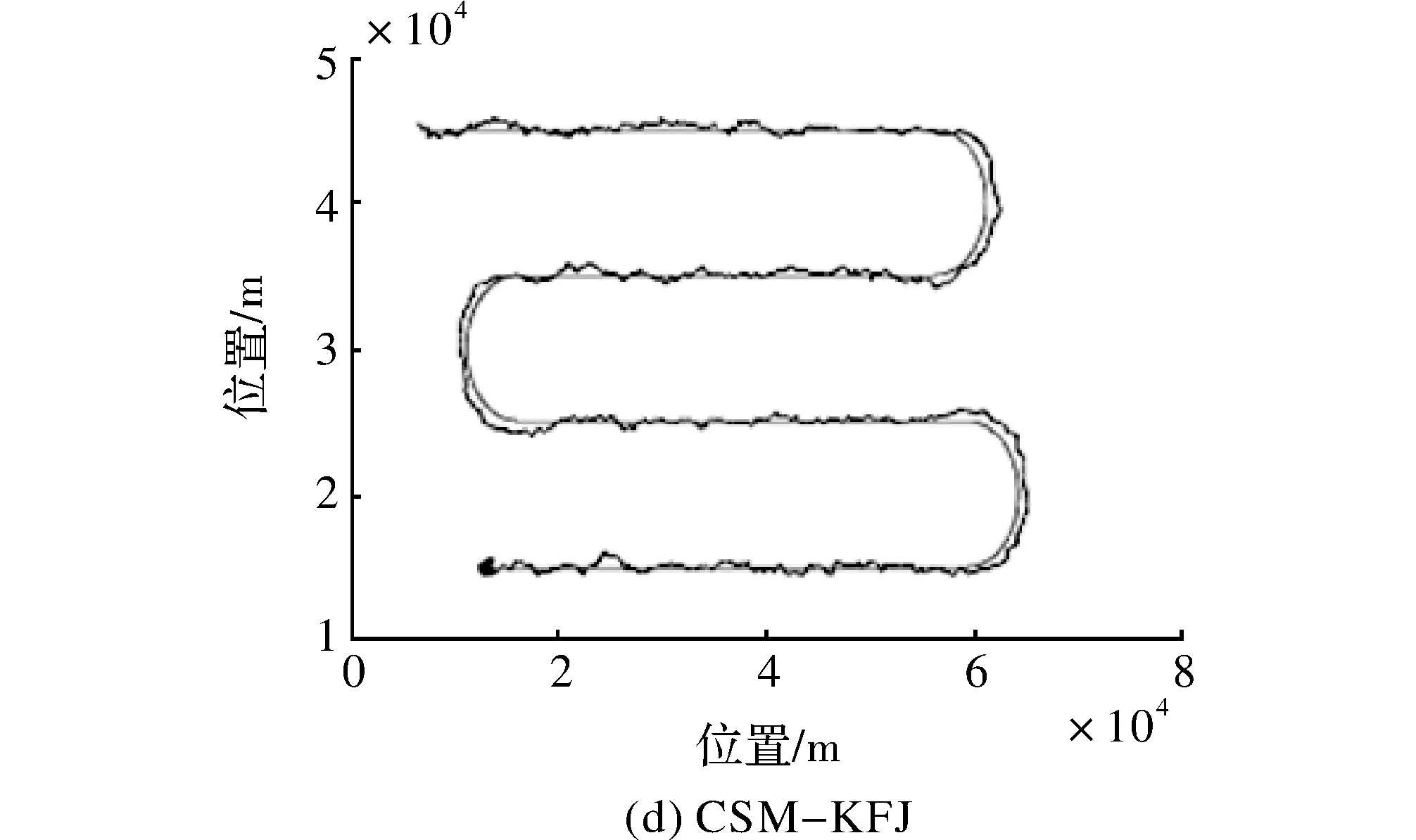
图2 原始航迹及融合结果
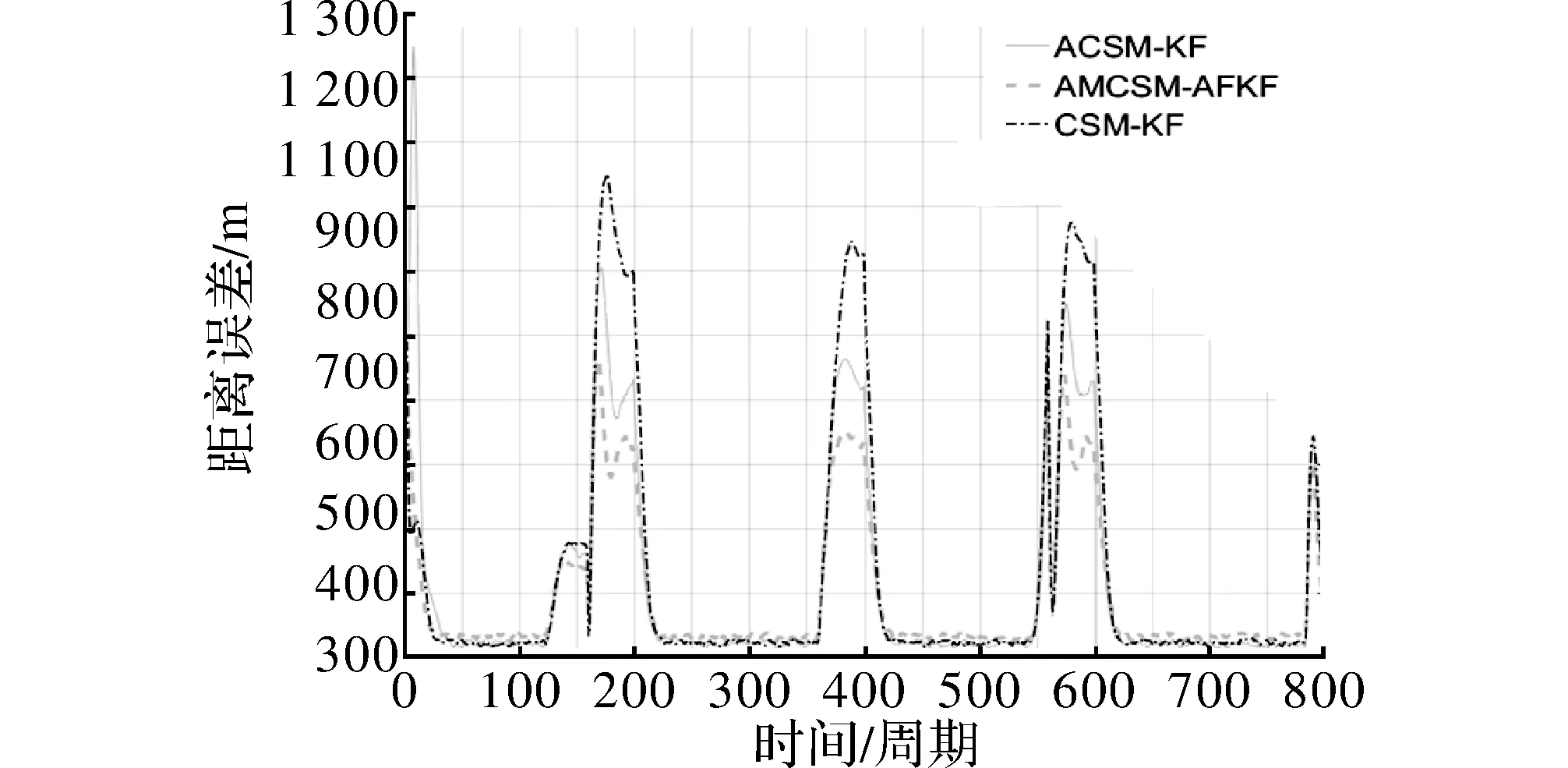
图3 位置的RMSE曲线
可以看出,在匀速运动过程中,3种方法均具有较好的性能,而在160~200周期、360~400周期、560~600周期的时候,系统目标进行的转弯运动,由于转弯是个非线性运动,因而“当前”统计模型和卡尔曼滤波框架出现出了较大的误差,通过观察,方差补偿改进算法利用了部分残差信息,因而性能要优于原始模型,而本文通过进行两个方面的改进,在机动过程中跟踪性能表现最好。
在第540~560周期中,系统进行了加速运动,在第720周期,目标发生了急停,机动参数在此期间均发生了变化,可以发现,3种方法此时的误差均变大,但本文提出的方法误差最小、性能最好。
2.2 强机动轨迹
假定目标起始状态:X0=[6 000 m,500 m/s,45 000 m,0 m/s],运动过程持续300 s,采样周期为0.5 s,测量误差为700 m,测量噪声为0均值高斯分布。具体运动过程如图4所示,在0~60 s目标保持在x方向上进行匀速,y方向上静止不动,60~80 s目标在x,y两个方向上均进行匀加速直线运动,在80~100 s目标采取转弯的机动行为,在100~180 s,目标在x方向上进行匀加速运动,在y方向上进行变加速运动,在180~200 s再次进行转弯机动,最后一直维持匀速直线运动。
某次仿真实验的结果如图5所示,2 000次Monte Carlo后3种方法的位置均方差RMSE曲线分别如图6所示。

图4 强机动真值航迹
图5 原始航迹及融合结果

图6 位置的RMSE曲线
和上个仿真结果类似,可以看出,在4次强机动运动过程中,本文提出的方法的性能均优于仅进行方差补偿改进的性能,而原始的模型则是误差最大的,因而表明,本文提出的算法无论是在非线性运动过程中,还是在突发的机动过程中,目标跟踪性能均有较大提高。
3 结束语
本文在基于“当前”统计模型和卡尔曼滤波框架的航迹融合算法中引入强机动检测,对强机动运动过程进行机动频率和最大加速度补偿,缩小模型与系统模式之间的匹配误差;同时针对滤波系统达到稳态后对预测协方差增大不能及时跟踪的情况,引入协方差自适应因子,动态调节增益矩阵,提高滤波器对突发状态的响应能力。通过这两点改进,算法不仅保留了对一般机动目标的有效跟踪,同时增强了对突发强机动的跟踪能力。仿真结果表明,本文提出的基于“当前”模型自适应改进的航迹跟踪算法无论在非线性运动还是在突发强机动的情况下性能均明显优于仅进行方差补偿改进算法和原始的“当前”统计模型算法。
[1] Jin M, Hong S, Shi Z, et al. Current statistical model probability hypothesis density filter for multiple maneuvering targets tracking[C]. Beijing:International Conference on Wireless Communications & Signal Processing IEEE,2009.
[2] Singer R A.Estimating optimal tracking filter performance for manned maneuvering targets[J].IEEE Transactions on AES,1970,6(4):473-483.
[3] 范小军,刘锋,秦勇,等. 基于 STF 的当前统计模型及自适应跟踪算法[J]. 电子学报, 2006, 34(6): 981-984.
[4] Krisher J A. Motor vehicle torque transfer case with integral constant velocity (CV) joint: U.S. Patent 6319132[P]. 2001-11-20.
[5] Wang C C, Thorpe C, Suppe A. Ladar-based detection and tracking of moving objects from a ground vehicle at high speeds[C].CA,USA:Intelligent Vehicles Symposium,Proceedings,IEEE,2003.
[6] 王锦章,孙菲,刘先康,等. 基于卡尔曼滤波的航迹信息预处理技术[J]. 电子科技,2013, 26(8): 22-25.
[7] 嵇成新,许江湖,张永胜,等.一种跟踪机动目标的变结构交互多模型滤波算法[J].系统工程与电子技术,2003,25(5):595-599.
[8] 刘昌云,刘进忙,陈长兴,等.机动目标跟踪的机动频率自适应算法[J].控制理论与应用,2004,26(4):961-965.
[9] 刘春恒,梁彦,周东华,等. 强跟踪滤波器在被动跟踪中的应用[J].清华大学学报,2003,43(7):880-883.
[10] 赵敏.机动目标跟踪理论的研究及其应用[D].西安:西北工业大学,2006.
[11] 易凯,刘伟,张宝童.基于 IMM-UKF 的机动目标跟踪方法[J].电子科技,2012, 25(4): 6-8.
[12] 董凯,关欣,刘瑜,等. 基于交互式当前统计模型的变采样率跟踪算法[J].空军预警学院学报,2013,27(2):115-117.
[13] 兰义华,任浩征,张勇,等.一种基于 “当前” 模型的改进卡尔曼滤波算法[J]. 山东大学学报:工学版,2012,42(5):12-16.
[14] 孙福明.机动目标跟踪状态估计与数据关联技术的研究[D].合肥:中国科学技术大学,2007.
[15] 何友,修建绢,强晶炜,等.雷达数据处理及应用[M].北京:电子工业出版社,2006.
An Adaptively Adjusting Improved Algorithm of Trajectory Tracking Based on Current Statistical Model
CUI Longfei,ZHANG Xing,WU Xiaochao,ZHANG Caikun
(Institute,Electronic Equipment Experimental Center of Luoyang, Luoyang 471000, China)
In the case of the strong maneuver such as turning and accelerating, the tracking fusion accuracy of the traditional current statistical model goes sharply declined. To solve this problem, we proposed an improved model by extracting the information of the residual error sequence and measuring the variance sequence. The new model we proposed can adaptive adjust to the maneuvering frequency and maximum acceleration by the detection of the maneuvering mode and the addition of the covariance adaptive factor in the kalman filtering framework. Through the improvement, the algorithm can not only keep the good performance of general maneuvering target tracking, but also improve the matching degree between current statistical model and the real motion pattern in the situation of target maneuvering state transition, which makes the fusion accuracy of the track fusion system greatly improved when the target maneuvering state is abrupt. Finally, Monte Carlo simulation is used to verify the proposed method.
track-fusion;current statistical model;kalman filter;innovation sequence;variance adaptive
2016- 11- 21
崔龙飞(1988-),男,博士研究生。研究方向:空情融合等。
10.16180/j.cnki.issn1007-7820.2017.09.032
TN713;TP301.6
A
1007-7820(2017)09-117-06