基于交流励磁的高旋载体转速测量传感器
2017-09-18李剑,武丹,韩焱
李 剑,武 丹,韩 焱
(中北大学信息探测与处理技术山西省重点实验室,山西 太原 030051)
基于交流励磁的高旋载体转速测量传感器
李 剑,武 丹,韩 焱
(中北大学信息探测与处理技术山西省重点实验室,山西太原030051)
针对陀螺仪等惯性器件测量高旋弹转速时,存在累积误差大、测量范围受限的问题,提出了基于交流励磁的高旋载体转速测量传感器。该传感器利用法拉第电磁感应原理,采用三轴“弯工型”感应线圈,获取弹体大转速条件下切割地磁场的信息,通过自适应闭环频率跟踪测量算法实时解算高旋载体的旋转速度。试验验证表明,该传感器不仅能够测量大动态转速范围内的转速信息,而且消除了累积误差,满足高旋弹大转速、高精度的测量要求,对常规弹药弹体改进和弹丸的设计研究具有一定的工程应用价值。
转速;自适应闭环频率跟踪测量;FPGA
0 引言
高旋弹是常规弹中重要的弹种之一,它通过旋转保证其飞行的稳定性,同时通过调整旋转速度改变飞行姿态、修正飞行弹道,实现对目标的精确打击。在高旋弹结构改进、性能测试过程中,准确地测量其旋转速度(即转速)是改进高旋弹结构、提高打击精度的关键。目前,高旋弹的精确制导化是国际武器弹药领域的一个研究热点[1-3]。其中,测量弹体飞行时的角运动参数(如角速率、角位移)是一项直接关系到高旋弹制导精度的关键参数之一。
目前主要采用陀螺仪获取弹体的角速率信息[4-10],如基于磁悬浮控制力矩陀螺的角速率传感器[11-12]、电容式角速率传感器[13]和基于低频磁动流体力学的角速度测量传感器[14]等。这些传感器虽然具有体积小、重量轻的优势[15],但仍存在转速测量范围小、零漂和累积误差大的问题。虽然通过卡尔曼预测等算法能够修正一部分误差,但仍无法满足实战条件下,对高旋弹旋转速度大动态、高精度的测量需求。针对上述问题,本文利用电磁感应原理,提出了交流励磁式转速测量传感器,以满足高旋弹测量大转速的要求。
1 传感器的设计原理
本文提出的转速测量方法主要基于周期测频法,原理如图1所示。

图1 基于周期测频法的转速测量原理示意图Fig.1 Schematic diagram of measurement principle of rotational speed based on period method
预设标准信号xs(t)的初始频率为fs0,在被测信号第一个周期的闸门时间内,计数脉冲值为M1,则可得当前转速RAD1为:
(1)

(2)
式(2)是自适应闭环频率更新模型,标准信号会随着被测信号频率的变化进行自适应调节,使其在被测信号对应的一个周期内输出固定的脉冲数N。
2 传感器的设计方案
转速测量传感器的总体设计方案如图2所示,包括转速信息获取模块、标准信号频率更新模块、转速信息测量模块和输出模块四部分。
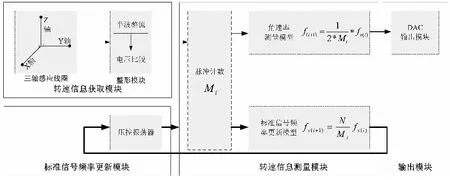
图2 传感器设计方案示意图Fig.2 Schematic diagram of design scheme of the sensor
2.1 基于三轴感应线圈的转速信息获取模块
采用电磁感应线圈获取弹体不同转速下切割地磁场的信号。根据法拉第电磁感应原理,在线圈线径0.09 mm、匝数9500匝、切割磁场频率为4~150 Hz的条件下,磁场交变频率与线圈感应电压之间的关系如表1所示。

表1 交变频率与线圈感应电压关系表
通过数据拟合的方式计算其线性度,如图3所示。结合图3和表1可知,在4~150 Hz的交变磁场条件下,线圈的切割频率与产生的感应电压呈线性关系,线性度为0.5%,满足高旋弹大转速范围的测量要求。

图3 线圈输出特性曲线图Fig.3 Output characteristic curve of coil
采用“弯工型”骨架绕制单轴线圈,通过三轴正交安装的方式,实现三轴地磁测量,如图4所示。

图4 三轴线圈安装示意图Fig.4 Schematic diagram of installation method of triaxial coils
2.2 基于自适应闭环频率跟踪算法的转速信息测量模块和标准信号频率更新模块
采用DAC控制VFC输出标准信号xs(t)。通过标准信号频率更新公式(2),在被测信号每周期的初始时刻,控制VFC更新标准信号。
DAC和VFC的关系如下,设在第i周期,DAC的输出电压为Vi,VFC的输出频率为fsi。根据VFC的传输特性,则两个变量满足如下关系:
fsi=a·Vi+b
(3)
结合式(2)可知,为了更新标准信号的频率,下一个周期,DAC对应的输出电压应自适应调节为:
(4)
通过在FPGA内部建立模型(4)即可更新DAC的输出电压值。同时,将计数值Mi锁存,利用式(1)—式(4)即可计算出对应的转速RAD。
2.3 传感器输出模块
传感器输出转速信息包括两个参数:零位脉冲和转速。零位脉冲以脉冲方式输出,表示弹体旋转一周的初始时刻;转速以DAC电压方式输出,利用公式(1)—(4)可以计算出相应的转速值。
3 试验验证
为了验证传感器设计方案的可行性和在实际工况中的适用性,利用三轴电动高速转台对传感器的动态性能进行了标定(转台最高测试频率150 r/s)。如图5所示,将转速传感器固定在转台的轴心处,控制转台旋转偏移30°。

图5 三轴高速转台实验测试平台Fig.5 Experimentaltest platform of three-axis high-speed turntable
图6为转台在预设转速为150 r/s时的输出信号波形图。

图6 传感器输出信号波形图Fig.6 The oscillogram of output signals of the sensor
按照表2所示的预设参数对传感器进行动态标定,得到了不同转速下的测试结果。
由表2可知,当转台按照预设转速进行试验时,传感器的测量误差均小于0.3%,尤其在100 r/s以上的高旋环境下,测量误差小于0.1%,说明本文研制的传感器能够准确地测量转速信息,并兼容50 r/s以下的低转速,在工程上具有一定的适用性和应用价值。同时,传感器的输出存在一定的误差,误差主要来源于VFC的非线性误差。由VFC的输出特性可知,在1/3~2/3F.S.(满量程)的频率范围内,VFC的线性度最高。本文采用的VFC是AD654,预设N值为1 024时,F.S.对应的最大转速为200 r/s,因此,66~133 r/s区间的测量误差最小,小于66 r/s的低转或大于133 r/s的高转,误差较大。

表2 三轴高速转台实验测试结果
4 结论
本文提出了基于交流励磁的转速测量传感器。该传感器利用三轴线圈获取弹体大转速条件下的电磁感应信号,采用自适应闭环频率跟踪测量算法,通过周期刷新和脉冲计数实时解算旋转速度。高速离心机动态标定试验的结果表明,传感器能够在3~150 r/s的范围内有效测量转速信息,测量误差小于0.3%,在大动态转速环境下具有良好的适用性和有效性,可以实现对高旋弹转速参数的实时、高精度测量,具有一定的工程应用价值。为了进一步提高转速参数的测量精度,如何修正VFC在非最佳频率区域的动态特性,如何在旋变条件下进行实时解算是下一步的研究方向。
[1]贾秋锐,孙媛媛,肖树臣,等. 航空制导炸弹发展趋势[J]. 制导与引信,2014,35(1):8-11.
[2]韩磊,庞艳珂,曹禹,等. 精确打击技术在信息化战争中的应用及发展趋势[J]. 兵工学报,2010,31(2):75-78.
[3]李杰,赵诣,刘俊,等. 高旋弹药飞行姿态测量用半捷联MEMS惯性测量装置研究[J]. 兵工学报,2013,34(11):1398-1403.
[4]Zareh M,Soheili S. A modified model reference adaptive control with application to MEMS gyroscope[J]. Journal of Mechanical Science and Technology,2011,25(8):2061-2066.
[5]Fei J T,Xin M Y. An adaptive fuzzy sliding mode controller for MEMS triaxial gyroscope with angular velocity estimation[J]. Nonlinear Dynamics,2012,70(1):97-109.
[6]Mo B,Deng M W,Kim S,et al. The elimination of gyroscope’s non-linear error and the broadening of its passband[J]. Microsystem Technologies,2014,21(4):1-7.
[7]路永平,潘英俊,黎蕾蕾,等. 采用双轴加速度计的旋转弹运动姿态角速率测量方法[J]. 中国惯性技术学报,2015,23(2):160-164.
[8]翁海诠,任春华,张敬栋,等. 基于最小分辨率的MEMS陀螺漂移抑制方法研究[J]. 仪器仪表学报,2011,32(10):2371-2375.
[9]Cardou P,Angeles J. Estimating the angular velocity of a rigid body moving in the plane from tangential and centripetal acceleration measurements. Multibody System Dynamics,2008,19(4):383-406.
[10]Zhou X Y,Zhang Z Y,Fan D P. Improved angular velocity estimation using MEMS sensors with applications in miniature inertially stabilized platforms[J]. Chinese Journal of Aeronautics,2011(24):648-656.
[11]Zheng S Q,Han B C. Investigations of an integvelocityd angular velocity measurement and attitude control system for spacecraft using magnetically suspended double-gimbal CMGs[J]. Advances in Space Research,2013(51):2216-2228.
[12]王平,王华,任元. 基于磁悬浮控制力矩陀螺的航天器姿态角速率测量方法[J]. 兵工学报,2015,36(10):1907-1915.
[13]Azimloo H,Rezazadeh G,Shabani R. Development of a capacitive angular velocity sensor for the alarm and trip applications[J]. Measurement,2015(63):282-286.
[14]Xu M J,Li X F,Wu T F,et al. Error analysis of theoretical model of angular velocity sensor based on magnetohydrodynamics at low frequency[J]. Sensors and Actuators A,2015(226):116-125.
[15]Sun W,Li W J,Xu Y. A MUMPs angular-position and angular-speed sensor with off-chip wireless transmission[J]. Microsystem Technologies,2001(7):63-70.
MeasuringSensorforHigh-speedRotatingProjectilesBasedonACExcitation
LI Jian,WU Dan,HAN Yan
(Institute of Signal Capturing & Processing Technology, Key Laboratory of Shanxi Province, North University of China, Taiyuan 030051, China)
According to the fact that rotational speed measurement by using inertial components, such as gyroscope, has the problems of big accumulative error and narrow measuring-band, a rotational speed measuring sensor is brought up in this paper for measuring rotational speed of high-speed rotating projectiles based on AC excitation. On the one hand, according to the electromagnetic induction principle, triaxial induction coils with type bent I-shape are adopted to acquire the information of projectile moving across geomagnetic field within a large dynamic range of rotational speed. On the other hand, rotational speed is calculated in real time through self-adaptive closed-loop frequency tracking measurement algorithm. Experemental results demonstrated that the developed sensor not only could measure the information of rotational speed with an extremely high dynamic range of rotational speed, but also could eliminate accumulative error. The proposed sensor satisfied measurement requirements for high-speed rotating projectiles with wide range of rotational speed and high precision, and had definite value to engineering application in improvement of conventional ammunition and design research of projectiles.
rotational speed; self-adaptive closed-loop frequency tracking measurement; FPGA
2017-01-17
:李剑(1985—),男,山西太原人,博士,讲师,研究方向:传感器技术及多维信息处理。E-mail:lijian851208@126.com。
TP212.6
:A
:1008-1194(2017)04-0039-04