桁架式桥梁检测车关键结构的设计与计算
2017-09-18赵睿
赵 睿
(山西省交通科学研究院,山西太原 030006)
桁架式桥梁检测车关键结构的设计与计算
赵 睿
(山西省交通科学研究院,山西太原 030006)
以桥梁检测车为研究对象,对其检测臂架进行结构设计,研究和探讨桥梁检测车的开发及应用。根据基本参数确定桥梁检测车的总体设计方案和桁架机构设计方案,建立桥梁检测车Solidworks实体模型,并对检测臂各部件结构进行设计与计算;应用Solidworks软件对桥梁检测桁架机构进行虚拟装配和运动学仿真研究。结果表明:各桁架结构满足强度要求,设计合理,可为下一步研发新型桥梁检测车奠定理论基础。
桥梁检测车;桁架结构;结构设计;运动仿真
0 引 言
桥梁在长期使用过程中会发生各种结构损伤,从而引起一系列安全问题[1⁃5],因此需要通过定期维修和加固来解决这些问题,而完成这些工作的基础是对桥梁结构进行系统检测。目前桥梁的检测工作主要使用多功能桥梁检测车,在检测车系统中最为关键的结构为检测臂,其设计优劣直接决定了检测车作用的发挥。本文针对桁架式桥梁检测臂系统进行设计与计算,为新型桥梁检测车的下一步研发奠定理论基础。
1 桥梁检测臂整体方案
1.1 系统组成
桥梁检测臂系统主要由主桁架、检测桁架以及回转机构三部分构成[6],如图1所示。
主桁架通过回转支承结构与检测桁架连接,将检测臂从桥上伸到桥梁下部以检测桁架;回转机构用来连接并控制桁架在水平面内的转动[7⁃8]。

图1 检测臂结构
1.2 运动形式的确定
桥梁检测车检测臂运动形式包括2个回转运动和2个摆幅运动。2个回转运动为底盘回转机构与回转支撑的水平回转运动;2个摆幅运动为主桁架、检测臂桁架的摆幅运动[9⁃12]。底盘回转机构带动臂架结构、回转支承结构带动检测臂在水平面内作0°~180°的转动;四边形摆幅机构实现主桁架、检测臂桁架的摆幅运动,使检测臂在垂直面内作0°~90°的转动[13⁃15]。
1.3 三维造型
根据桥梁检测车工况确定如下参数:桥下水平作业有效长度为13 m;桥面以下垂直作业范围为0~9 m;跨越人行道距离为2.2 m;跨越护栏高度为2Ʊ1 m;跨越箱梁厚度为6 m;检测速度不大于30 cm·s-1;系统定位精度不大于l cm·m-1;臂架总质量不大于1 500 kg;采用多种防倾覆措施;承受风力不大于8级。
根据上述参数,在三维造型软件Solidworks中对桥梁检测臂进行全比例实体造型,如图2所示。

图2 桥梁检测臂结构模型
2 桥梁检测臂桁架结构的设计与计算
桥梁检测臂桁架主要包括主桁架和检测桁架,以下根据检测车参数对这2种桁架进行结构设计与计算。
2.1 主桁架结构设计
设计要求检测车垂直作业范围为桥面下0~9 m,检测车主桁架长度为11 m,截面为60 cm×60 cm。主桁架通过一对液压缸带动实现往复运动。主桁架采用燕尾滑槽与四边形机构连接,燕尾导轨放置于主桁架上,燕尾滑块放置于四边形机构。工作过程中,燕尾滑槽不仅使主桁架随滑块往复运动,还可以减少摆动给液压缸带来的冲击。其结构如图3所示。
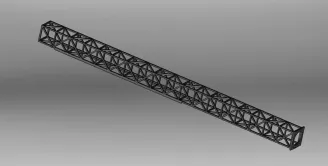
图3 主桁架结构
2.2 主桁架校合计算
2.2.1 抗拉伸强度计算
忽略主桁架偏心力矩及自身重量,由于桁架竖立,仅受检测臂拉力和检测车的支持力,受到的剪切力可忽略不计。桁架材料Q235钢的屈服极限为235 MPa,槽钢的截面积为18.516 cm2。
由拉伸/压缩强度计算公式可知

式中:F1为受力值;Ssum为受力总面积;S为槽钢截面积;[σ]p为屈服强度。
由此可知,当主桁架受力小于1.740 5×106N时,主桁架满足抗拉伸强度要求。
2.2.2 抗弯曲强度计算
Q235钢的许用弯曲强度为158 MPa,槽钢桁架横截面对Y轴的抗弯矩截面系数最小为13 cm3,最易弯曲。考虑最恶劣情况,将受力简化为一个作用于检测臂单边的集中力F2。根据力矩平衡原理可知


由此可知,主桁架受力小于16 432 N时,主桁架满足抗弯曲强度设计。
综合上述,可以确定当主桁架受力小于16 432 N时,结构处于稳定状态。根据受力分析,主桁架受力约为8 820 N,因此本文对于主桁架的设计满足要求。
2.3 检测桁架结构设计与计算
设计要求检测臂桥下的检测总长度为13 m,因此采用2节架结构即可满足条件。每节长度为6Ʊ5 m,2节间配合长度为0.5 m,2节桁架截面系数分别为60 cm×60 cm和50 cm×50 cm。检测桁架工作过程中桁架1与桁架2依次水平展开,连接形式为移动副,如图4所示。
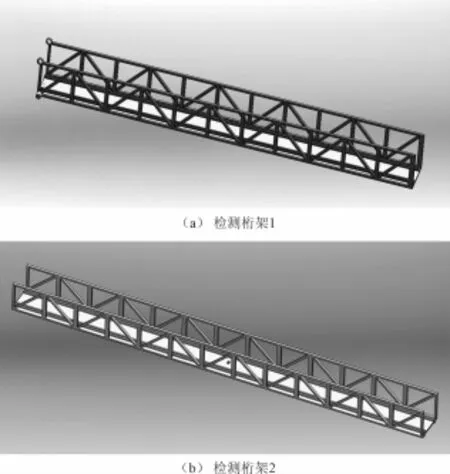
图4 检测桁架结构
根据检测臂的受力情况,检测臂单边受力为主要受力,故只对检测臂的弯曲强度进行校核。具体计算过程与主桁架相同,根据受力分析,检测臂受力为4 900 N,小于16 432 N,因此本文关于检测桁架的设计也满足要求。
3 桥梁检测臂回转机构的设计与计算
3.1 驱动方式的确定
检测车通常利用液压、电气和机械等驱动方式实现回转运动。与其他驱动方式相比,液压驱动方式除具有配置灵活方便、易于操纵控制、可实现过载保护等优点外,还有功率⁃质量比大、力⁃质量比大及转矩⁃惯量比大等优势[7],所以本检测车采用液压方式驱动回转机构。
3.2 传动方式确定
回转运动的实现方式有齿轮传动、涡轮蜗杆传动和液压缸直接驱动等。其中,齿轮传动具有传动平稳可靠、使用寿命长、传动效率高、结构紧凑且能实现360°回转等优点。因此,本检测车2个回转机构均采用传动比更大的一对齿轮传动,即用液压马达驱动小齿轮来带动大齿轮,大齿轮带动被驱动机构实现回转运动。
3.3 传动载荷计算
当伸出臂、竖直臂、工作臂全部平行展开时,臂架重心偏离转台回转中心距离最远,臂架竖直方向迎风面积最大。此时,计算参数取值为:回转支承装置转台重力G0=3.2 kN;臂架总重力G=6 kN;臂架重心与转台回转中心距离d=2.5 m;臂架的迎风面积SW=5.4 m;臂架承受风力FW=370 N·m-3;风力作用线与回转中心距离L=12 m。
不同工况下支撑所受载荷的计算如下,其中工况1为动态容量计算载荷,工况2为静态容量计算载荷。
工况1下八级风力时的工作载荷为

其中:K为安全系数。
工况2下不计风力时的最大载荷为

回转支撑结构采用单排四点接触式,由相关文献可知,工况参数和载荷换算系数分别为fm=1Ʊ25、fs=1Ʊ55,回转支撑当量载荷不计,则静态载荷为
动态载荷为

3.4 驱动装置计算
3.4.1 驱动力矩计算
回转机构的工作载荷是回转阻力矩Msw,它主要由摩擦阻力矩Mf、倾斜时引起的回转阻力矩Ms、风压引起的阻力矩Mw以及回转惯性引起的阻力矩Mp组成。以下对上述力矩分别进行计算。
回转支撑装置的摩擦阻力矩

回转平台倾斜时引起的回转阻力矩

其中:R为回转驱动旋转半径。
风压引起的阻力矩

其中:风压值FN=150 kN·m-2;臂架水平方向迎风面积SL=6.25 m2;Ln为臂长。
回转惯性引起的回转阻力矩

其中:回转速度n=3 r·min-1;启动时间t=4 s;伸出臂重力G=12 500 N;臂架重心到转台中心的水平距离L=2.5 m。
基于上述计算,驱动装置驱动力矩值为

3.4.2 驱动功率计算
驱动马达最大回转功率为

式中:液压马达系数H、m、λm的值均为1;回转速度n=3 r·min-1;机械总效率μ=0.9。
本系统采用低速(0~150 r·min-1)大转矩液压马达回转机构,可以直接在油马达轴上安装回转机构小齿轮,系统结构紧凑。
4 结 语
本文以桥梁检测车为研究对象,对检测臂进行设计与计算。根据基本参数确定了桥梁检测车及检测臂总体设计方案,并对检测臂桁架结构进行了设计及校合计算。分析结果表明,设计的各桁架结构满足强度要求。此外,确定了回转机构的驱动方式和传动方式,并计算了传动载荷及驱动装置的各参数。本文的分析计算结果可为下一步研发新型桥梁检测车奠定理论基础。
[1] 高怀志,王君杰.桥梁检测和状态评估研究与应用[J].世界地震工程,2000,16(2):57⁃64.
[2] 廖海峰,黄德义.混凝土桥梁的检测技术及其新发展述论[J].武汉交通管理干部学院学报,2000,2(4):26⁃28.
[3] 郝少楠.智能桥梁检测车的机械设计与仿真[D].太原:中北大学,2011.
[4] 蒋神杰.模糊综合评价在桥梁检测中的应用研究[D].合肥:合肥大学研究所,2007.
[5] 李 光.液压柔性臂的动力学及控制研究[D].长沙:中南大学,2003.
[6] 宣纪明,沈福兴.桥梁检测技术研究及工程运用[J].桥梁建设,2007(s1):158⁃160.
[7] 赵静一,安东亮,孙炳玉,等.基于ADAMS和ANSYS的桥梁检测车臂架结构的研究[J].中国工程机械学报,2009,7(2):219⁃222.
[8] 崔文毅,潘夏表.桥梁检测车在桥梁检测中的应用[J].筑路机械与施工机械化,2006,23(12):46⁃48.
[9] 王秀敏,杨世华,沈建明,等.桥梁检测车机械臂监控系统设计与研究[J].计算机仿真,2011,28(9):338⁃341.
[10] 龚栋梁.桥梁检测车的研究与开发[D].武汉:武汉理工大学,2009.
[11] 邓国红,陈超超,欧 健,等.桥梁检测车臂架结构风振响应分析[J].重庆理工大学学报,2010,24(5):12⁃17.
[12] 李淑慧,杨一明.桁架式桥梁检测车仿真设计与应用研究[J].筑路机械与施工机械化,2010,27(3):75⁃78.
[13] 杨晓乾,田 瑶.基于某桥梁检测车设计缺陷的改进方案[J].筑路机械与施工机械化,2008,25(11):67⁃68.
[14] 郝少楠,王 彪,李鑫勇.基于ANSYS的桥梁检测车检测臂有限元分析[J].机械工程师,2010(9):85⁃87.
[15] 梁 鹏,李 斌,王秀兰,等.基于桥梁健康监测的有限元模型修正研究现状与发展趋势[J].长安大学学报:自然科学版,2014,34(4):52⁃61.
[责任编辑:王玉玲]
Design and Calculation of Key Structure of Trussed Bridge Inspection Vehicle
ZHAO Rui
(Shanxi Transportation Research Institute,Taiyuan 030006,Shanxi,China)
Taking the bridge inspection vehicle as the research object,the structural design of the main parts of the boom was studied,and the development and application of the bridge inspection vehicle were studied and discussed.The general design of the bridge inspection vehicle and the truss mechanism was determined in terms ofthe fundamental parameters,and the entity modelwas established with Solidworks.The design and calculation ofthe components ofthe inspection arm were carried out.The virtualassembly and motion simulation of the truss mechanism were conducted by using Solidworks software.The results show that each truss structure can meet the requirement of strength and has reasonable design,which provides further research and development of bridge inspect vehicle with theoretical basis.
bridge inspection vehicle;truss structure;structural design;motion simulation
U446.3
B
1000⁃033X(2017)08⁃0081⁃04
2017⁃01⁃31
赵 睿(1965⁃),女,山西太原人,高级工程师,研究方向为交通机电工程。
