以智能控制实验室为基础的球杆控制系统设计
2017-09-18田芳许弟建董超群陈运红
田芳,许弟建,董超群,陈运红
1重庆科技学院电气与信息工程学院;2重庆科技学院机械与动力工程学院;3重庆电务段
以智能控制实验室为基础的球杆控制系统设计
田芳1,许弟建1,董超群2,陈运红3
1重庆科技学院电气与信息工程学院;2重庆科技学院机械与动力工程学院;3重庆电务段
智能控制实验室是针对自动化专业和电气工程与自动化专业学生而建立的实验室。主要是为自动控制原理课程做实验验证及研究。球杆系统的开发是为自动化专业及相关专业的学生学习自动控制、运动控制课程。对于控制理论相关课程,是一个非常便于实验课堂和实验研究的平台。而针对不稳定线性系统,球杆系统的控制系统的建立具有典型性。
球杆系统;控制系统智能
引言
球杆系统是一个非常不稳定的非线性系统,是为基础控制课程教学,比如自动控制原理等实验而设计的一种实验设备,相对于线性系统而言,分析与设计方法困难许多。实际的球杆系统比理论描述上的要复杂的多,所以系统仿真的出现显得尤为重要[1]。它以计算机为工具,以系统数学模型为基础,对实际系统进行实验和研究。方法是:第一步利用软件建立数学模型,第二部是设计算法,进行计算机仿真,这样做的目的是用来检测所设计的算法是否可行,病比较算法的优劣性;最后是实时控制,实时控制的方法是将算法写到所对应的控制器当中来实现。
1 球杆系统的特点
球杆系统是一个典型的具有真正意义的非线性系统。球杆系统执行机构具备很多非线性特性,包括:死区、直流马达、非线性的带轮传动、位置测量的不连续性、由于不是绝对光滑的导轨表面,会产生响应的非线性阻力。当前,如何设计一个控制性能具有鲁棒性是需要解决的一个非常重要的问题。
2 球杆系统的主要组成部分
球杆系统的构造分为几部分构成,具体如图1所示:
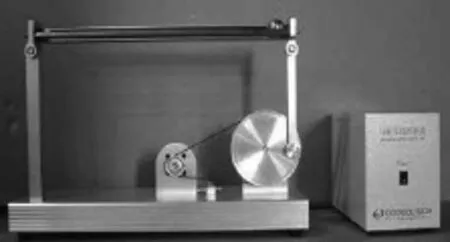
图1 球杆系统的组成
球杆系统组成:
(1)机械部分包含直流伺服马达、直流电源;
(2)型号为IPM100的智能伺服驱动;
(3)控制用计算机。
3 球杆系统机械模型的建立
球杆系统机械模型原理图:
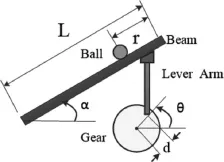
图2 球杆系统机械模型
齿轮中心与同步带轮和连杆之间的连线与水平线的夹角为θ,由于θ角受局限,其位于固定的最大值与最小值间,连杆和齿轮中心与齿轮的连接点距离是d,横杆长度是L,得到横杆的倾斜角α和θ之间有一个数学表达式:
α=dLθ
电机轴和角度θ之间有一个减速比,最终使得小球在某一个固定的位置平衡,这是控制器设计的任务,通过调整齿轮的角度θ达到这一效果。
4 电气模型
电机附带的有一个编码器,这个编码器可以检测到电机轴的位置,整个过程是:通过编码器,输出一定的脉冲信号,脉冲信号并反馈给智能伺服驱动。接下来控制器会对编码器的信号进行分频处理,这样做的目的能够提高电机位置的精度。每当电机转了一圈,index信号就会产生一个负的脉冲,这样可以用于同步控制,或者是精确控制。
(1)电机模型
电流和电机的转矩是正比的关系:
T=K2iα
K2是转矩常数;
Iα是电枢电流。
其工作原理为:电机开始转动,电枢产生一个反向的电动势,这个电动势的大小与磁场强度、转动速度间成正比例关系,磁场到达一定强度,反电动势eb和dθdt成正比:
eb=k3dθdt
其中:eb为反电动势;
k3为感常数;
θ为电机的角度。
5 控制系统
系统的控制功能主要通过下面的步骤来实现:
(1)把控制程序通过RS232的方式下载到IPM100的内部寄存器中;
(2)系统每隔一段时间就会接受到电机编码器传送过来的信号和小球的位置信号;
(3)程序编码是通过板载DSP,通过反馈过来的小球的位置信息与控制算法计算控制量;
(4)放大计算所得到的控制量并通过IPM100的电源驱动模块作用给电机;
这样,通过控制电机的位置,让小球保持在设定的位置上。
[1]吴偏偏,王富东,王敬驰.球杆控制系统设计[J].自动化技术与应用,2015.09:114~116
[2]胖永新,金迪,孟宪东.球杆系统的建模、仿真与控制器设计[J].武汉大学学报,2005.12:142~146
[3]刘阳,万隆军,徐轶群.浅谈球杆系统的建模与仿真[J].中国科技信息,2014.08:159~162
[4]李凌,袁德成.球杆系统的控制器设计方法研究[J].仪器仪表学报,2012.08:295~298
项目名称:应用技术型高校独立实验类课程考核研究与实践,项目编号:201502。
