车辆动力学模型的优化分析
2017-09-17冯晓宇
摘要:为保证车辆行驶过程中的安全性,本文首先对车辆的动力学模型进行了简化处理,得到车辆动力学的数学模型,然后分析出控制车辆稳定运行时的关键参数,为使车辆行驶在最优参数下,获得最大的行驶安全性,结合遗传优化算法,对数学模型进行优化计算分析,最后,通过计算分析得到最优的控制参数,保证车辆行驶过程中的安全性。
关键词:车辆动力学;优化计算;遗传优化计算;安全行驶
1、 引言
随着科学技术的飞速发展,交通行驶道路的路面得到极大改善,以及车辆制造的工艺越来越好,致使目前车辆设计的最高时速和车辆行驶的速度越来越快,另外,车辆驾驶员初次驾驶的年龄逐渐低龄化,同时仍有部分老年驾驶员在道路上驾驶车辆行驶,这就需要现代车辆具有良好的操控性和安全性。
2、 车辆动力学模型分析
假设轮胎回正力矩对车轮外倾角无影响,则简化车辆模型的轮胎力是关于轮胎侧偏角和垂直载荷这两个因素的函数,又因轮胎侧向力与轮胎侧偏角为线性关系,进而可以获得简化后车辆模型的车辆动力学方程为:
(1)
上式中,m为车辆所具有的质量,v为车辆侧向速度,r为车辆横摆角速度,uc为车辆前进速度,Caf为车辆前轮侧偏刚度,Car为车辆后轮侧偏刚度,a为车辆前轴到质心的距离,b为车辆后轴到质心的距离,I为车辆横摆的转动惯量。
进一步,令车辆的状态变量为
(2)
前轮转角作为系统输入U,车辆的理想动力学模型的状态空间为:
(3)
其中
依据车辆的理想动力学模型可得车辆的理想横摆角速度rno,另外结合轮胎与地面之间最大附着系数的限制,
(4)
上式中,v为车辆侧向速度,r为车辆横摆角速度,为轮胎与地面之间的附着系数,g为重力加速度,R为车辆的转向半径。
在实际应用过程中,一般处理方法为:
(5)
所以通过比较rno,rmu,的最小值,即为得到确定的车辆横摆角速度期望值rm,利用制动过程中产生的横摆力矩,使得实际的车辆横摆角速度与期望的车辆横摆角速度一致,这样就可以尽量保持车辆行进过程中的稳定性。
但是,随着行驶车辆的车速越来越快,或者车辆方向盘的转角越来越大,此时车辆的侧偏角与侧偏角速度都趋于变大,车辆的行驶不稳定性也随之而来,很难通过自我修正的方法使车辆恢复至稳定状态,如图1所示,只有侧偏角和侧偏角速度位于相平面中心位置时,车辆可以保持稳定的行驶状态。
通过确定的车辆横摆角速度期望值rm以及车辆侧偏角βm,与车辆实际行驶过程中所具有的车辆横摆角速度期望值r以及车辆侧偏角β,经过比较器得出二者相对应的差值Δr与Δβ,根据所得的Δr与Δβ的大小确定车辆修正摆正力矩ΔM,进而使得车辆保持车辆动力学稳定性。
3、 动力学模型的优化分析
3.1 优化分析方法简介
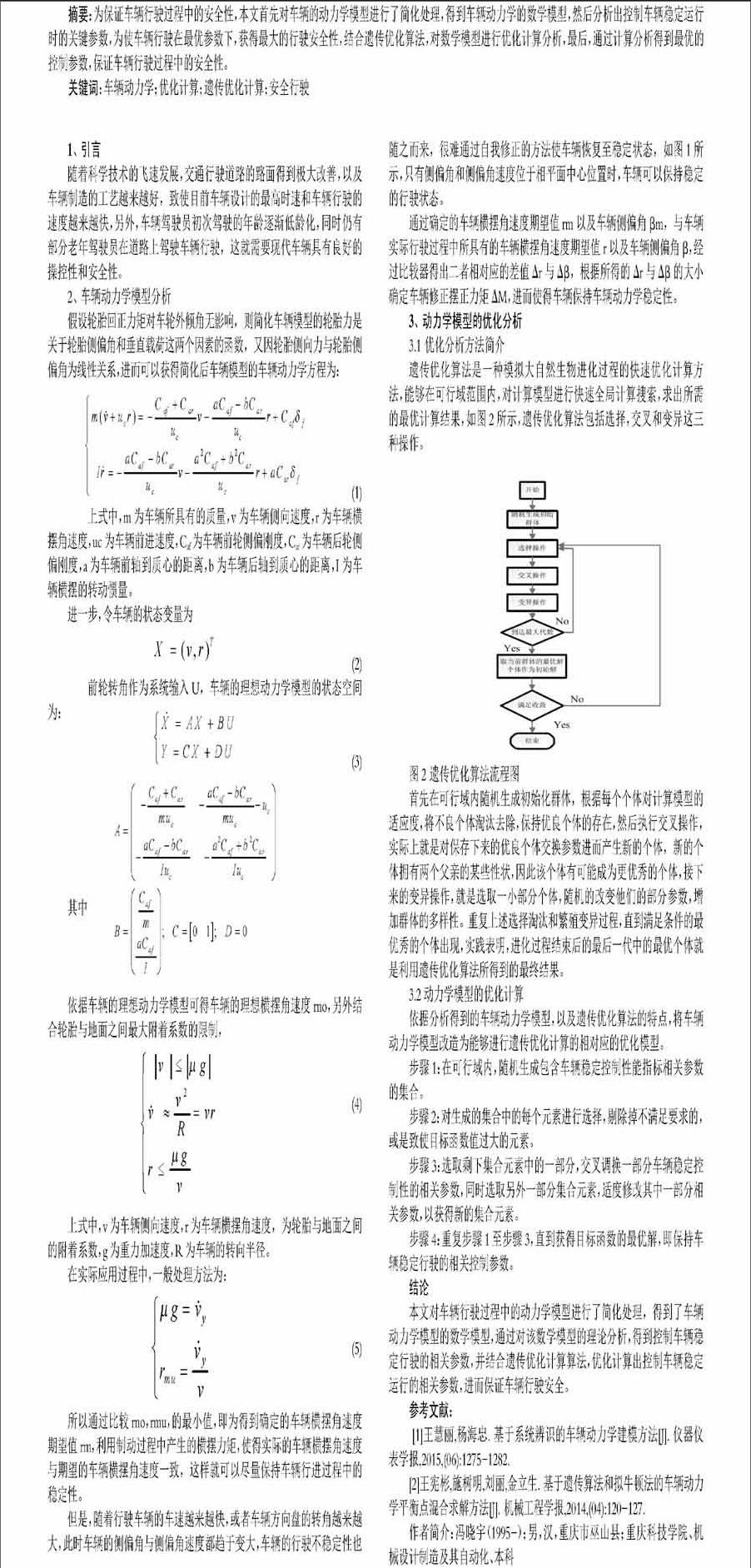
遗传优化算法是一种模拟大自然生物进化过程的快速优化计算方法,能够在可行域范围内,对计算模型进行快速全局计算搜索,求出所需的最优计算结果,如图2所示,遗传优化算法包括选择,交叉和变异这三种操作。
图2 遗传优化算法流程图
首先在可行域内随机生成初始化群体,根据每个个体对计算模型的适应度,将不良个体淘汰去除,保持优良个体的存在,然后执行交叉操作,实际上就是对保存下来的優良个体交换参数进而产生新的个体,新的个体拥有两个父亲的某些性状,因此该个体有可能成为更优秀的个体,接下来的变异操作,就是选取一小部分个体,随机的改变他们的部分参数,增加群体的多样性。重复上述选择淘汰和繁殖变异过程,直到满足条件的最优秀的个体出现,实践表明,进化过程结束后的最后一代中的最优个体就是利用遗传优化算法所得到的最终结果。
3.2动力学模型的优化计算
依据分析得到的车辆动力学模型,以及遗传优化算法的特点,将车辆动力学模型改造为能够进行遗传优化计算的相对应的优化模型。
步骤1:在可行域内,随机生成包含车辆稳定控制性能指标相关参数的集合。
步骤2:对生成的集合中的每个元素进行选择,剔除掉不满足要求的,或是致使目标函数值过大的元素。
步骤3:选取剩下集合元素中的一部分,交叉调换一部分车辆稳定控制性的相关参数,同时选取另外一部分集合元素,适度修改其中一部分相关参数,以获得新的集合元素。
步骤4:重复步骤1至步骤3,直到获得目标函数的最优解,即保持车辆稳定行驶的相关控制参数。
结论
本文对车辆行驶过程中的动力学模型进行了简化处理,得到了车辆动力学模型的数学模型,通过对该数学模型的理论分析,得到控制车辆稳定行驶的相关参数,并结合遗传优化计算算法,优化计算出控制车辆稳定运行的相关参数,进而保证车辆行驶安全。
参考文献:
[1]王慧丽,杨海忠. 基于系统辨识的车辆动力学建模方法[J]. 仪器仪表学报,2015,(06):1275-1282.
[2]王宪彬,施树明,刘丽,金立生. 基于遗传算法和拟牛顿法的车辆动力学平衡点混合求解方法[J]. 机械工程学报,2014,(04):120-127.
作者简介:冯晓宇(1995-);男,汉,重庆市巫山县;重庆科技学院、机械设计制造及其自动化、本科endprint
