星载激光雷达在林业上的应用研究进展
2017-09-15舒清态杨凯博吴娇娇张亚红
胥 喆,舒清态,杨凯博,吴娇娇,张亚红
(西南林业大学林学院,云南 昆明 650224)
星载激光雷达在林业上的应用研究进展
胥 喆,舒清态,杨凯博,吴娇娇,张亚红
(西南林业大学林学院,云南 昆明 650224)
简单介绍了星载激光雷达系统的特点及其工作原理和组成部分,重点阐述了基于GLAS数据对森林冠层高度、森林生物量进行估算的方法,以及基于GLAS数据在森林类型识别和郁闭度估算等方面的应用研究,并分析总结了星载激光雷达进行估测的研究进展及其一些局限性。
星载激光雷达;GLAS;森林冠层高度;生物量;波形参数
森林是重要的环境资源,是物质资源最丰富、分布及面积最广的陆地生态系统,也是陆地生态系统的关键部分,占全球总植被碳储量的86%,对于改善全球生态环境与维持碳平衡起着决定性的作用[1]。森林生物量不仅是估算碳储量及评价森林碳循环贡献的基础,也是森林生态功能评价的关键参数。近年来,人类日益关注着全球气候的变化,更加表明对于各尺度上森林生物量变化监测及估算碳储量的重要性。传统方法估算森林生物量,需要进行外业实地测量获取地面数据,不仅费时、费力,且通常适用于小范围区域,无法获取大区域乃至全球范围的森林生物量,且更新较慢。
随着遥感技术的发展,光学遥感虽弥补了传统方式的不足,有效减少外业调查和计量的人力和时间耗费,并且能在保证精度的同时保证数据的空间完整性与时间一致性[2]。但是,在森林垂直结构信息获取方面具有一定局限性,时常出现区域性光谱信号饱和的问题[3]。而激光雷达(LIDAR,Light Detection and Ranging)是一种新兴的主动遥感技术,将现代激光技术与传统雷达技术融为一体,不仅消除了光学遥感影像产生的信息饱和问题,且可直接提供森林垂直结构信息,能精确获取研究对象的三维地理坐标[4]。星载LiDAR是基于卫星平台运行,具有观测视角宽和运行轨道高两大特征,覆盖世界的每一个小区域,可以连续完整的记录其回波的波形数据,且在植被垂直分布测量、海面高度测量等监测方面也发挥着重要作用,对于森林生物量的估算也非常关键。
鉴于星载LiDAR在估测森林结构参数方面的优势,本文重点阐述了利用GLAS数据进行森林结构参数的估测方法,讨论其优缺点,展望应用前景。
1 ICESat—GLAS简介
1.1 ICESat—GLAS系统
ICESat(Ice,Cloud and Land Elevation Satellite)—GLAS(Geoscience Laser Altimetry System)对地观测卫星由美国加利福利亚的Vandenberg空军基地于2003年1月13日成功发射。主要科学目标是:①对极地冰雪的变化物质总量的平衡进行认知;②对冰盖变化和气候间的关联进行探索;③对全球范围中的云、气溶胶垂直结构与云层高度进行测量,以便于全球温度平衡的研究;④绘制陆地拓扑图,对陆地表面粗糙度及反射率和植被冠层高度、冰雪盖面的表面特点进行测量,便于一些科学研究及应用[5]。ICESat飞行高度约为600 km,倾角为94°,观测范围可覆盖全球南北纬86°之间的大部分区域,ICESat卫星上搭载着GLAS传感器,它是第一个进行全球范围内连续不间断观测的星载激光测高系统,重复周期为183 d。GLAS在进行地面高度测量时,其激光器以40次·s-1发射红外(1046 nm)和绿色(523 nm)脉冲,红外进行地面测高,绿色进行大气后续散射测量。脉冲宽度为4 ns,相当于0.6 m的地面高度,其形成的地面光斑点约为直径70 m的椭圆,在卫星飞行轨道上的2个光斑相隔170 m[6]。GLAS发射的脉冲为高斯型,且接收波形也能视为高斯波形。
ICESat—GLAS数据产品分15种标准数据产品,包括Level-1A、Level-1B和8个Level-2数据产品[7]。其中1A级产品为GLA01—04,1B级产品为GLA05—06,2级产品为GLA12—15。GLA01为全球高程数据,提供测高仪接收与发送的全波形信息,可反映光斑内的地物信息,并为森林结构参数估算提供中间参数;GLA05为更正数据,包括波形特征参数和地形特征参数;GLA06表示表面高及进行高度观测所得数据的物理与大气改正;GLA14为陆地植被测高数据,是森林植被覆盖研究中的主要数据,包括回波振幅、标准差和面积,以及各波峰参数。在进行森林生物量估算时,主要使用GLA01、GLA05、GLA14这3种数据,而数据一般在国际冰雪数据中心NSDIC(National Snow and Ice Data Center)免费获取。
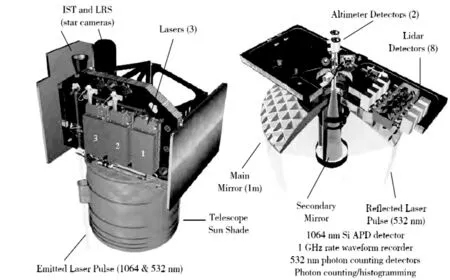
图1 GLAS传感器示意图[8]
1.2 ICESat—GLAS系统的组成及工作原理
ICESat—GLAS系统主要由3部分构成:激光扫描系统、位置/方向控制系统以及控制单元(图1)。而其最为核心的部分是激光扫描系统。在GLAS系统上搭载着3个独立工作的激光器,主要用于接收与发射激光信号,且当1个激光器发生故障无法使用时,可对剩余2个进行检查,对其采取间歇性交替工作的卫星运行模式;方向/位置控制系统则由差分GPS(DGPS)和关系测量装置(IMU)组成,具体作用为确定扫描仪的姿态参数和平台位置;控制单元主要用于控制与协调各部分功能,确保正常运行。
星载LIDAR测高原理与雷达高度计一致,但是,前者是光学遥感器,使用激光测高,可见光(532 nm)与近红外光(1064 nm)为其工作频段,后者为微波遥感器,微波(1 mm~1 m)为其工作频段,两者相比,星载激光雷达的工作频率高出约1万~10万倍[9]。星载激光雷达采用脉冲激光技术,以星下点指向方式,从传感器沿星下点方向进行激光脉冲发射,经过地面漫反射及大气分子散射形成返回脉冲,则激光回波脉冲相对于发射激光主波间的时延为其传感器与光斑点间的距离[10]。
2 GLAS数据估测森林冠层高度

图2 GLAS回波波形参数计算示意图[12]
星载大光斑雷达利用其记录的全波形参数进行森林冠层高度估测,即当反射能量大于某一给定的背景噪声阀值时,星载雷达才开始以相等的时间间隔进行回波波形记录。在森林覆盖的激光光斑内,森林的最高冠层会有一部分入射激光脉冲被反射回接收系统中,由此形成激光返回波形中的首个有效回波点,即返回波形与有效能量相交的临界点,称之为第一回波或顶层回波;另一部分入射激光脉冲则穿透森林冠层抵达地面,形成激光返回波形的末个大振幅的回波波形峰点,称之为最后回波或地面回波。森林的垂直分布情况由地面回波与顶层回波间的信号来反映(图2)。在较为平坦地区,冠层高度由顶层回波与地面回波间的差值表示[11];在地面起伏地区,会有波形展宽产生,因此,必须减去地面起伏产生的波形展宽。
基于不同坡度范围内反演森林冠层高度时,需使用激光波形长度和地形指数为变量建立线性或非线性模型。在地形起伏较大的区域,光斑内的森林冠层信息容易与地面反射信息相混合,使得在解译波形方面极度困难,在冠层信息的精度提取中受到限制[13]。在未结合DEM数据的情况下,胡艳等[14]通过GLAS数据对黑龙江省小兴安岭区域提取树高,并与二类调查数据做精度检验,其精度达92.67%,但受地形坡度起伏和树木冠形的干扰,其波形长度与实际树高有差异,且GLAS数据在连续性和密度上有待进一步研究。Lefsky等[15]使用波形展宽、上端边缘纠正系数和下端边缘纠正系数这3个波形特征参数进行森林冠层高度估算模型的建立,并使用此模型对巴西热带常绿阔叶林和北美常绿针叶林的冠层高度进行估测,得出结论R2=83%,RMSE=5 m。同时,在其描述的算法中,认定平均树高为波形展宽与纠正系数的差值,并且可不再依赖DEM数据,消除了地形的影响。庞勇等[16]使用理论模拟技术阐述了地形起伏对大光斑雷达回波波形的干扰,并在地形坡度不同的情况下对同种树木参数的回波波形进行模拟,利用GLAS数据对其检验,研究表明:波形长度会随坡度的增大而增加,同时回波也都展宽,地面与植被的波峰值也随之降低,坡度和波形长度呈近似线性正相关。表明在进行森林参数反演时,可减去一个地形起伏度因子实现地形效应纠正,以减弱地形对森林冠层高度估算的影响。
为了消除在森林冠层高度估测中地形的影响,Lefsky等[17]将GLAS数据与地面辅助数据SRTM(30 m和90 m精度)相结合,在3种生态系统中(巴西热带阔叶林、美国田纳西州温带阔叶林和俄勒冈州温带针叶林)进行最大冠层高度估测,通过建立地形因子与冠层高度的线性关系来对地形的影响进行减弱,得出结果:在3个生态系统中,最大森林冠层高度估算模型结果的R2=59%~68%,RMSE=4.85~12.66 m。邢艳秋等[18]以吉林长白山林区为研究区,在分析其获取的3512个激光光斑中GLAS高程和DEM高程间的联系,得出两者的相关系数为0.99(RMSE=0.016 m),且依据Carabajal等[19]与Sun等[20]的描述,此结果说明了激光光斑的地理坐标范围误差极小,几乎可以不计。邢艳秋等[18]还将所测地面调查数据依据不同坡度分为不同组合,各自进行模型建立,公式为H=b0(W-b1g),式中:H为森林冠层高度;w为波形长度;g为地形指数;b0、b1为各自系数。结果表明:坡度在0~15°范围内,GLAS波形参数可完全的估测森林冠层高度,解释能力为51%~90%,其结果与Lefsky等[17]的研究结果相符,星载激光雷达系统在平坦区域内能较好的进行森林冠层高度估测;坡度在15°~30°间,伴随着坡度的增大,模型对变量的解释能力也随之明显降低。所以,为提高GLAS数据在地形起伏较大地区的反演精度,必须改善波形数据的处理方式,以及改良森林冠层高度估测模型。
王蕊等[21]在吉林省汪清县林区应用GLAS数据估测坡地森林冠层高度,采用4个波形参数:波形长度(Wext)、地形指数(g)、未改进的后缘长度(Trailext)和改进的后缘长度(Trailmod),分为5组分别建立估测模型进行对比,第1个为采取DEM数据量化的地形坡度的Xing模型[16],公式为:H1=a1(InWext+b1g)+d1;第2个为对Xing模型进行改进,用未改进的后缘长度代替其中的地形因子,公式为:H2=a2InWext+c1Trailext+d2;第3个为将未改进的后缘长度加入Xing模型中,公式为:H3=a3InWext+b2g+c2Trailext+d3;第4个为采用Hilbert等[22]提出的改进的后缘长度代替地形指数,它可以在冠层与地面的峰值强度出现明显差异时十分有效的对地形特征进行定量化,公式为:H4=a4InWext+c3Trailmod+d4;第5个为将改进后的后缘长度加入Xing模型中,公式为:H5=a5InWext+b4g+c4Trailmod+d5。比较分析以上估测模型结果表明,基于波形自身特征变量的模型比基于辅助地形DEM数据的模型结果均更优秀,表明在进行地形坡度的量化时,波形自身特征参数表征坡度的能力更高。
以上研究均与DEM数据相结合,通过相关地形指数来消除地形的影响,但是,由于GLAS数据在空间上具有不连续性,无法得出连续的森林空间结构参数,因此必需使用与其他遥感技术相结合的方法对森林冠层高度进行无缝估测。Lefsky[23]利用GLAS数据进行全球森林冠层高度的估测,并结合MODIS数据的分割产品对空间的连续进行扩展,首次形成全球的森林树高图。时隔1 a,Simard等[24]使用不同于Lefsky研究的输入变量和运算方法进行全球树高图的绘制,主要结合全球气候产品、高程产品和植被覆盖产品,采用随机森林计算法进行不同森林类型的树高反演,研究结果显示估测模型的R2为0.69。
董立新等[25]以长白山林场为研究区,使用星载激光雷达与MERSI遥感数据进行结合,反演区域尺度林分冠顶高度。通过植被高度、LAI和覆盖度之间的转换关系,采用公式H=AH×LAI/F,式中:H为植被高度;LAI为叶面积指数;F为覆盖度;AH为系数。建立不同森林类型森林冠顶高度与LAI/F比值间的模型,得出结果:针叶林R2=0.653;其次,阔叶林R2=0.520;混交林最低,R2=0.314。因此,就纯林而言,两者间具有较好的关系,可利用以上模型结合森林类型覆盖图外推出林区的森林冠顶高度,制作森林冠顶高度图。
吴迪等[26]以大兴安岭塔河林业局营林区为研究区,在不同地形条件下,选取最优算法进行森林冠层高度提取。采用GLAS 数据与多角度光学遥感MISR/BRF数据相联合,通过Breiman提出的随机森林机器RF(Random Forest)学习算法生成连续分布的塔河林场树高图,使树高信息提取从点扩展到面尺度上,并结合实测样地数据对其进行精度检验,结果显示:R2=0.72,RMSE=1.83 m,精度达到85.22%。还对其反演结果的误差进行空间相关性分析,得出全局空间自相关指数Moran′sI=0.0031,P=0.4610,充分表明误差的整体空间格局为随机格局,不存在显著的全局相关性。由于此研究是基于坡度<10°的样地进行的,因此如何在复杂地形中,应用有效方法来定量和消除反演过程中的累加误差还需更深入的探究。王成等[27]以东北三省为研究对象,通过GLAS数据与MODIS数据相结合,并使用人工神经网络训练来建立最佳BRDF反照率参数的森林冠层高度反演模型,通过此模型获取整个东北区域的森林冠层高度分布图。
3 森林冠层垂直结构分布及郁闭度估测
星载大光斑雷达通过数字化形式接收其在冠层与地面之间的回波信号,所接收的波形与树冠的垂直结构紧密关联(图3)。且大光斑雷达系统所接收的波形参数完全展示光斑点冠层组分(叶、干、枝)表面垂直投影的反射,更能反映出树叶、树干和树枝的表面积,同时可基于截面回波进行部分林分冠层垂直结构的重建[11]。就目前而言,Lefsky等[28]采用SLICER波形数据完整的表述了树冠体积的垂直分布情况,国内外极少有专家学者利用GLAS数据进行完整的描述森林冠层的垂直结构分布。
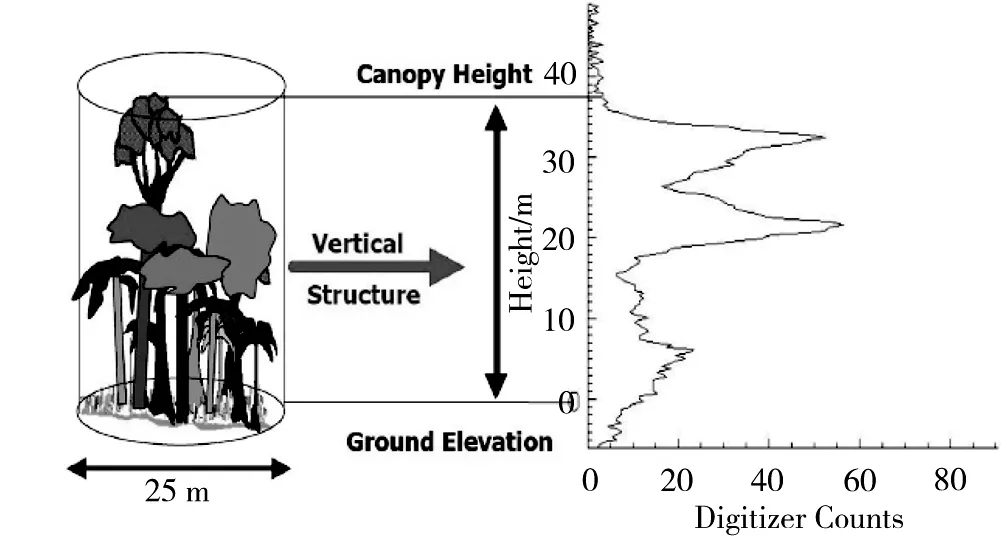
图3 大光斑Lidar森林回波波形示意图[30]
冠层截面的垂直结构就如树冠高度一样,为植被分类研究提供了一种新技术,并为估测树冠其他结构参数奠定基础,且是森林连续分布评价的一个关键指标。树冠结构表示树冠局部与总体生长特征,树冠的构型直接控制了树木个体的形态、生产力及生长活力。树冠随着林分年龄的增加和林分的生长,其垂直分布也会随之产生变化。成过熟天然林主要表现为高度和林龄结构变化极大,林隙较多,在垂直结构分布上也更均一,而同龄林绝大部分冠层物质都处于树顶周边[29]。早期,Lefsky研究表明,激光波形对于森林垂直结构连续性的变化十分敏感。
森林郁闭度作为森林生态系统评价环境指标的关键因子之一,星载大光斑雷达在对其进行估测时,需使用冠层回波总能量与地面回波总能量之比来计算,并需要结合光学遥感数据辅助。目前国内外使用GLAS数据反演森林郁闭度的研究也很少。国外,García等[31]采用GLAS数据中的冠层基高度(CBH)估算森林郁闭度,研究得出估测精度达到89%,并与机载激光雷达估测值有着较好的线性关系。国内,王蕊等[32]利用GLAS波形数据和多光谱TM影像估测研究区的森林郁闭度,并采取多元线性回归和BP神经网络来联合GLAS数据与TM数据计算郁闭度,结果表明:当使用GLAS数据单独进行建模,其估测精度为0.762,在将两者相联合后进行森林郁闭度估测,其估测精度达到0.851,充分表明多源遥感数据在森林郁闭度估测中的优势,为后续的区域连续制图提供了可靠的方法。
4 GLAS数据的森林类型识别
目前,星载激光雷达数据已成功用于森林垂直结构信息的反演中,但在进行森林类型识别方面的研究很少,方法并不成熟,导致结果不理想。Duong等[33]使用GLAS数据进行土地覆盖分类,结果显示仅能将森林从土地类型中区分出来,而无法识别森林类型。2004年,Ranson等[34]尝试着从坡度<5°的激光波形中提取坡度角和质心的特征参数,并对西伯利亚中部地区的8种地面类型进行区分,然而所得的分类结果并不理想,2种参数出现了极大的重叠,无法将植被进行区分。2014年,刘美爽等[35]以长白山汪清林区为例,使用GLAS数据和支持向量分类机(C-SVC)方法联合进行森林类型识别,并通过K-折交叉验证方法对核函数选择进行评价,结果表明:支持向量分类机方法能较好的识别针叶林与阔叶林,精度达到85.24%,但是,在研究中所选取的3个森林类型分类变量中,对针叶林识别的表现并不理想,且缺乏对针阔混交林的识别分析。因此,今后需在针阔混交林识别方面进行更深入的研究,分析出更好的波形特征参数来进行森林类型识别。
5 GLAS数据估测森林生物量
近几年,星载激光雷达在森林生物量估测中得到广泛应用。星载激光雷达估测森林生物量时,其主要算法是提取波形参数(冠层高度展宽、波形半能量高度HOME、波形面积AWAV等),与野外样地调查数据(树高、胸径等)相结合,与实测生物量建立回归模型,并通过样地调查数据进行检验。
Nelson等[36]利用GLAS数据的前倾角和波长信息进行4种不同的生物量模型的建立,精确地估算了加拿大魁北克省127万km2范围的地面生物量,研究表明:GLAS数据可提供可靠的森林结构信息,可以大范围推广使用。庞勇等[37]进一步模拟了同种树木参数及地表条件下4种空间分布格局对大光斑激光雷达波形的影响,分别模拟了波形面积AWAV和波形半能量高度HOME与生物量等森林参数的相关性,研究表明:无论在规则分布中,还是随机分布时,森林参数反演指标选取HOME的效果更好;相对于聚集分布时,则森林参数反演指标选取AWAV的效果更好。由于波形面积和波形半能量高度与蓄积量、生物量有着紧密的关系,因此,可通过2个参数与生物量建模来进行反演。于颖等[38]对GLAS波形数据进行处理后,利用提取的HOME和AWAV 2个波形参数与已知样地的地上生物量建立反演模型,结果表明:生物量模型的决定系数为0.9974,理论精度达到91.3%,充分反映GLAS数据可精确的反演森林生物量。吴红波[39]利用GLAS数据估测长白山的林地生物量,估测精度达到80.56%,并且分析得出对森林冠层高度进行估测时,基于空间分辨率不同的DEM数据会对其结果产生一定的影响。
曲婉婷等[40]以小兴安岭为研究区,利用GLAS的7种波形参数及下端边缘纠正系数(TECF)和上端边缘纠正系数(LECF),对研究区中针叶林与阔叶林进行森林生物量估测,结果显示:相对于针叶林,引入纠正系数后的生物量反演模型的R2由0.727提升至0.806,RMSE则减小至35 Mg·hm-2;对于阔叶林,生物量反演模型的R2由0.657提升至0.796,RMSE减少至41 Mg·hm-2,这说明所选波形参数与生物量具有极高的相关性,但是由于森林类型的不同,今后需选择合适的波形参数进行生物量反演。
星载激光雷达由于自身固有的离散属性,在水平方向上的面积分布有一定限制,为了获得区域尺度上森林生物量分布,必须与光学遥感相结合。通过大量研究证明,使用GLAS数据与光学遥感数据相结合可实现森林生物量空间尺度上的无缝反演。Baccini等[41]采用GLAS数据与MODIS数据结合,估算出非洲热带森林区域的生物量,生成了第一张非洲热带森林的生物量分布图。
董立新等[42]在基于GLAS数据的反演森林冠层高度的算法上,并结合Landsat ETM数据建立森林地上生物量神经网络反演模型,实现了研究区域森林地上生物量分布图;且发现神经网络模型能够充分利用其先验知识,自动进行合理的模型生成,十分适用于地形复杂区域的生物量估算。GUO等[43]利用GLAS数据结合环境与灾害监测预报小卫星(HJ-1 CCD)的植被指数进行生物量反演,针对针叶林和阔叶林建立与地面调查数据的生物量估测模型,其决定系数分别为0.68和0.71;同时使用多元回归分析建立HJ-1卫星数据光谱反射值和植被指数与生物量的模型,得到的决定系数分别为0.55和0.52。另外,越来越多的研究者开始重视对估算森林地上生物量的不确定性分析,Saatchi等[44]通过GLAS数据与MODIS和QuikSCAT等光学数据联合估测全球热带国家及地区的森林生物量,同时生成森林生物量的不确定性分析图。要想减少结果的不确定性,就需模型其积累和传播方式,并对其结果进行量化,再根据引起它的主要原因进行修正估算过程,以提高估算精度。庞勇等[45]结合机载与星载激光雷达数据及MERIS数据和土地覆盖数据等遥感产品,利用Cubist决策树回归法对大湄公河次区域进行森林生物量的估测,并生成连续的森林生物量图,得到了各地区生物量分布情况,估测结果与其他报告公布的基本一致。汤旭光[46]针对长白山林区复杂的地形条件,联合GLAS估算的最大冠层高度、TM数据及其估算的LAI和郁闭度,采用多元线性回归法和BP神经网络模型法进行生物量反演模型的建立,并通过此模型完整的反演出区域尺度的生物量,实现了生物量的空间外推。
6 结论与展望
星载激光雷达是一项主动遥感技术,数据范围覆盖全球,与传统光学遥感相比,不仅克服了信号饱和的缺点,并且可对森林的垂直结构参数进行精确的获取,能进行高精度的森林结构参数的估测。通过星载LIDAR的回波参数,可以对森林冠层高度、疏密程度、地表类型及地表覆盖率进行分析研究,推算其森林生物量、蓄积量,有利于对森林进行有效规划与利用。
目前,虽然星载激光雷达在反演森林结构参数和生物量中获得了极大的进展,但仍有许多不足之处待解决。主要有:①数据的离散性,数据在空间分布的不连续性;②获取森林水平结构参数的缺乏;③在复杂地形条件下,由于光斑范围较大,波形易受地形起伏的影响,从而影响获取参数的精度;④在进行郁闭度估测、森林类型识别方面,所得精度并不理想。今后,在提高星载激光雷达估测森林结构参数的精度方面,需做更进一步的研究及努力。为克服GLAS数据的不连续性,可将长时间序列的光学遥感数据与GLAS数据相结合,实现森林空间结构参数的无缝估算。目前大部分研究都是基于经验模型进行反演,其时空可移植性差,因此,可发展机理模型来反演生物量更具潜力。在地形起伏较大的区域,可通过改善波形数据处理的方法,更加全面地考虑地形的影响因素,对估测模型进行改良,以减弱地形的影响。
[1]Olson J S,Watts J A,Allison L J.Carbon in live vegetation of major world ecosystems[R].Oak Ridge,Tenn:Oak Ridge National Laboratory,1983.
[2]Wulder M A,White J G,Stinson G,et al.Implications of differing input data sources and approaches upon forest carbon stock estimation[J].Environmental Monitoring and Assessment,2010,166(14):543-561.
[3]Duncanson L,Niemann K,Wulder M.Integration of GLAS and landsat TM data for aboveground biomass estimation[J].Canadian Journal of Remote Sensing,2010,36(2):129-141.
[4]Lefsky M A,Cohen W B,Parker G G,et al.Lidar remote sensing for ecosystem studies[J].Bioscience,2002(52):19-30.
[5]ABSHIRE J B,SUN XIAOLI,RIRIS H,et al.Geoscience Laser Altimeter System(GLAS) on the ICESat mission:Prelaunch and on-orbit measurement performance[C].IEEE Int-ernational Geoscience and Remote Sensing Symposium,2003,3:1534-1536.
[6]Schutz B E.Laser Footprint Location(Geolocation) and Surface Profiles[M].Austin:Center for Space Research in the University of Texas,2002.
[7]黄克标.基于激光雷达的大湄公河次区域森林地上生物量反演[D].昆明:西南林业大学,2011.
[8]赵一鸣,李艳华,商雅楠,等.激光雷达的应用及发展趋势[J].遥测遥控,2014,35(5):5-22.
[9]鄂栋臣,徐莹,张小红.星载激光测高及其在极地的应用研究分析[J].极地研究,2006,18(2):148-155.
[10]Sun G,Ranson K J.Modeling lidar returns from forest canopies[J].IEEE Transactions on Geoscience and Remote Sensing,2000,38(6):2617-2626.
[11]庞勇,李增元,陈尔学,等.激光雷达技术及其在林业上的应用[J].林业科学,2005,41(3):129-136.
[12]庞勇,于信芳,李增元.星载激光雷达波形长度提取与林业应用潜力分析[J].林业科学,2006,42(7):137-140.
[13]Harding D J,Carabajal C C.ICESat waveform measurements of within footprint topographic relief and vegetation vertical structure[J].Geophysical Research Letters,2005,32(21):741-746.
[14]胡艳,王迪,曲婉婷,等.利用大光斑激光雷达估测小兴安岭平均树高[J].安徽农业科学,2014,42(15):4707-4709.
[15]Lefsky M A,Keller M,Pang Y,et al.Revised method for forest canopy height estimation from Geoscience Laser Altimeter System waveforms[J].Journal of Applied Remote Sensing,2007,1(1):6656-6659.
[16]庞勇,李增元,车学俭,等.地形对大光斑激光雷达森林回波影响研究[J].林业科学,2007,20(4):464-468.
[17]Lefsky M A,Harding D J,Keller M,et al.Estimates of forest Canopy height and aboveground biomass using ICESat[J].Geophysical Research Letters,2006,32(5):441-441.
[18]邢艳秋,王立海.基于ICESat-GLAS完整波形的坡地森林冠层高度反演研究——以吉林长白山林区为例[J].武汉大学学报,2009,34(6):696-700.
[19]Carabajal C C,Harding D J.ICESat Validation of SRTM C-band Digital Elevation Models[J].Geophysical Research Letters,2004,32(22):117-137.
[20]Sun G,Ranson K J,Kimes D S,et al.Forest Vertical Structure from GLAS:An Evaluation Using LVIS and SRTM Data[J].Remote Sensing of Environment,2008,112(1):107-117.
[21]王蕊,邢艳秋,邱赛,等.基于ICESat-GLAS全波形数据的坡地森林冠层高度估测[J].安徽农业科学,2014,42(9):2790-2793.
[22]Hilbert C,Schmullius C.Influence of Surface Topography on ICESat GLAS Forest Height Estimaion and Waveform Shape[J].Remote Sensing,2012,4(8):2210-2235.
[23]Lefsky M A.A global forest canopy height map from the Moderate Resolution Imaging Spectroradiometer and the Geoscience Laser Altimeter System[J].Geophysical Research Letters,2010,37(15):78-82.
[24]Simard M,Pinto N,Fisher J B,et al.Mapping forest canopy height globally with spaceborne lidar[J].Journal of Geophysical Research:Biogeosciences(2005-2012),2011,116(G4):1-12.
[25]董立新,李贵才,戎志国,等.吉林长白山森林冠顶高度激光雷达与MERSI联合反演[J].武汉大学学报,2011,36(9):1020-1024.
[26]WU Di,FAN Wen yi.Forest canopy height estimation using LiDAR and optical multi-angler data[J].Journal of Beijing Forestry University,2014,36(4):8-15.
[27]王成,程峰.基于ICESat GLAS和MODIS数据的植被平均高度反演——以东北三省为例[C].北京:第一届全国激光雷达对地观测高级学术研讨会,2010.
[28]Lefsky M A,Hudak A T,Cohen W B,et al.Geographic variability in lidar predicti-ons of forest stand structure in the Pacific Northwest[J].Remote Sensing of Envi-ronment,2005,95(4):532-548.
[29]Lefsky M A,Cohen W B,Acker S A,et al.Lidar remote sensing of the canopy structure and biophysical properties of Douglas-fir western hemlock forests[J].Remote Sensing of Environment,1999(70):339-361.
[30]Drake J B,Dubayah R O,et al.Estimation of tropical forest structural characteristics using large-footprint lidar[J].Remote Sensing of Environm-ent,2002,79(2):305-319.
[31]Mariano García,Sorin Popescu,et al.Characterization of canopy fuels using ICESat/GLAS data[J].Remote Sensing of Environment,2012(123):81-89.
[32]王蕊,邢艳秋,王立海,等.联合星载ICESat-GLAS波形与多光谱Landsat-TM影像的森林郁闭度估测[J].应用生态学报,2015,26(6):1657-1664.
[33]Hieu D,Norbert P,Roderik L.Full waveform analysis:ICESat laser data for land cover classification[C].Proceedings of the ISPRS Midterm Symposium,Remote Sensing:From Pixels to Processes,2006:8-11.
[34]Ranson K J,Sun G,Kovaes K,et al.Landcover attributes from ICESat GLAS data incentral Siberia[C].IEEE International Geoscience and Remote Sensing Symposium,2004,2:753-756.
[35]刘美爽,邢艳秋,李立存,等.基于星载激光雷达数据和支持向量分类机方法的森林类型识别[J].东北林业大学学报,2014,42(2):124-128.
[36]Nelson R,Boudreau J,Gregoire T,et al.Estimating Quebec provincial forest resources using ICESat/GLAS[J].Canadian Journal of Forest Research,2009,39(4):862-881.
[37]庞勇,孙国清,李增元.林木空间格局对大光斑激光雷达波形的影响模拟[J].遥感学报,2006(1):97-103.
[38]于颖,范文义,李铭泽,等.利用大光斑激光雷达数据估测树高和生物量[J].林业科学,2010,46(9):84-87.
[39]吴红波.基于星载大光斑LiDAR数据反演森林冠层高度及应用研究[D].哈尔滨:东北林业大学,2011.
[40]曲婉婷,汪垚,刘观潮,等.基于GLAS激光雷达反演森林生物量[J].测绘通报,2014(11):73-77.
[41]Baccini N L,S J Goetz,M sun,et al.A first map of tropical Africa′s above-ground biomass derived from satellite imagery[J].Environmental Research Letters,2008,3(4):45011-45019.
[42]董立新,吴炳方,唐世浩.激光雷达GLAS与ETM联合反演森林地上生物量研究[J].北京大学学报:自然科学版,2011,47(4):703-710.
[43]GUO ZhiFeng,CHI Hong,SUN GuoQing.Estimating forest aboveground biomass using HJ-1 Satellite CCD and ICESat GLAS waveform data[J].Earth Sciences,2010,53(12):16-25.
[44]Saatchi Sassan S,Nancy L.Harris,Sandra Brown,et al.Benchmark map of forest carbon stocks in tropical regions across three continents[J].Proceedings of the National Academy of Sciences of the United States of America,2011,108(24):9899-9904.
[45]庞勇,黄克标,李增元,等.基于遥感的湄公河次区域森林地上生物量分析[J].资源科学,2011,33(10):1863-1869.
[46]汤旭光.基于激光雷达与多光谱遥感数据的森林地上生物量反演研究[D].长春:中国科学院研究生院东北地理与农业生态研究所,2013.
The Progress of Forestry Application Based on Spaceborne Lidar
XU Zhe,SHU Qingtai,YANG Kaibo,WU Jiaojiao,ZHANG Yahong
(CollegeofForestry,SouthwestForestryUniversity,Kunming650224,Yunnan,China)
This paper introduces the characteristics and working principle of the Spaceborne Lidar system,and elaborate the method of estimating forest canopy height and biomass based on GLAS data,and the application research on the forest type identification、estimation canopy density etc.It summarized research progress of Spaceborne Lidar estimate forest structure parameters and analyzed the limitations.
spaceborne LiDAR;GLAS;forest canopy height;biomass;waveform parameter
10.13428/j.cnki.fjlk.2017.01.030
2016-07-20
国家自然科学基金(31460194);国家自然科学基金(31060114);云南省林学一流学科建设经费资助
胥喆(1992—),男,江西抚州人,西南林业大学林学院硕士研究生,从事3S技术在林业中的应用研究。E-mail:987348582@qq.com。
舒清态(1970—),男,西南林业大学林学院副教授,博士,从事3S技术及森林景观经营研究。E-mail:shuqt@163.com。
S771.8;S757
A
1002-7351(2017)01-0141-08
