一种用于登乘栈桥的主动波浪补偿方法
2017-09-14苏长青郑文彬曾悠兵丁德甫
苏长青,郑文彬,曾悠兵,丁德甫
(九江精密测试技术研究所,江西 九江 332000)
一种用于登乘栈桥的主动波浪补偿方法
苏长青,郑文彬,曾悠兵,丁德甫
(九江精密测试技术研究所,江西 九江 332000)
针对高海况下风电塔运行维护的实际工程需求,设计一种带有主动补偿功能的登乘栈桥。分析栈桥的结构设计,以此为基础进行补偿模型的计算分析。以高速数字信号处理器为核心构建补偿控制系统,利用运动参考单元实时测量运维船的姿态及升沉变化,根据补偿模型计算出液压缸所需的运动行程,对液压系统进行控制,分别进行横摇、纵摇及升沉的补偿, 确保栈桥末端与塔基相对稳定,从而确保风电塔维护人员安全登乘。对运维船进行的码头系泊试验结果表明:该栈桥系统可有效补偿波浪对运维船的影响,完全满足高海况下的运维通勤需求。
登乘栈桥;主动波浪补偿;运动参考单元
0 引 言
随着能源需求持续增长,我国海上风电行业迅速发展,风电机安装数量大幅增长[1]。然而,受潮汐、台风、气流和闪电等环境因素影响,海上风电机组容易出现故障。因此,海上风场在运营时通常需要配置维护船舶来提供通勤服务,将专业技术人员安全、快速地运抵作业现场。面对突发情况,专业化的运维船舶在抵达作业现场后,由于潮汐和海上风浪的叠加作用,使得海面与风机基础钢爬梯间的落差过大,无法攀爬登陆。现阶段海上输送风电塔维护人员一般采用直升机输送和船舶吊机输送2种方式,其中:直升机输送需要风电塔额外提供直升机降落平台,考虑到直升机尺寸的限制,每次输送的维护人员数量有限;而船舶吊机输送时,吊机悬挂的吊篮会随着船舶的运动而运动,一旦船体剧烈摇晃,吊篮里维护人员的安全将难以得到保证。
目前,国内带有波浪补偿功能的装置及专利多见于起重机、钻探机、打捞作业和并靠补给等设备中[2],对于海上风电登乘设备,尚无成熟的登靠装置可用。
1 栈桥结构设计
运维船在空间内的运动共有6个维度,分别为3个线运动和3个角运动。其中:3个线运动用横荡、纵荡及升沉来表示;3个角运动用欧拉角来表示,分别为航向、纵摇及横摇。国内某些型号的主动波浪补偿系统采用Stewart平台来补偿船舶在6个维度上的运动[3],将登乘栈桥安装于船头中心位置,使用时运维船一直顶着风电塔基,可消除横荡和纵荡的影响,并可保证航向的稳定,大大简化了系统设计。因此,登乘栈桥只需要补偿船体的横摇、纵摇和升沉运动,具有3个维度的补偿量。在结构上,设计的登乘栈桥由补偿横摇运动的横摇油缸、补偿纵摇运动和升沉运动的纵摇油缸及伸缩油缸组成,此外还包括登乘梯、扶手及安装底座等装置,系统的总质量约1450kg,具体结构形式见图1。
2 补偿模型分析
登乘栈桥的升沉补偿是通过比例阀来控制液压油缸的行程,从而推动整个栈桥在动态情况下保持稳定。纵摇运动与升沉运动会复合在一起,影响末端登乘点的位置;横摇运动只影响登乘栈桥的姿态。下面分别对这2部分进行补偿分析。
2.1 横摇补偿
对登乘栈桥的横摇运动进行建模,抽象出由L1,L2和L3组成的三角形(见图2)。从图2中可看出,在横摇运动补偿中,只需保持L2与水平面的夹角β恒定,即可保证平台的稳定。由图2可知
式(1)中:α为L1与L2的夹角;θ为L1与甲板的夹角;γ为甲板绕艏艉线与水平面的夹角(即横摇角),右舷下降为正,通过运动参考单元测量得到;β为L2与水平面的夹角。θ和β均由机械尺寸设计值确定。
只需调节L3的大小(即液压油缸的行程),即可改变α的大小,保持β恒定,从而保持栈桥基座的稳定。
2.2 纵摇及升沉补偿
对登乘栈桥的纵摇运动及升沉运动进行建模,抽象出由L6,L7和L8组成的三角形(见图3)。从图3中可看出,在运动补偿时,要通过改变L7来调整登乘梯的姿态,通过改变L9来调整登乘梯的长度,确保登乘点T的稳定。
假设纵摇角和升沉均为 0,以运动参考单元安装点O为原点,船头方向为x轴正方向,垂直水面向上为y轴正方向,建立坐标系。以登乘梯保持水平时的登乘点T为稳定目标点,则T点的坐标为
式(2)中:L4为船头与运动参考单元的距离;L5为O′A′的长度;L6为A′B′的长度。
在升沉运动与纵摇运动复合下,运动参考单元安装点运动至O′点,B点运动至B′点,可计算出B′点的坐标为
式(3)中:θ为艏艉线与水平面的夹角(即纵摇角),艏抬高为正,通过运动参考单元测量得到;h为运动参考单元测得的安装点的升沉。
此时可通过距离公式计算出B′T的长度为
纵摇补偿油缸L7的长度为

只需调节L7和L9的大小(即液压油缸的行程),即可改变β的大小和登乘梯的长度,从而保持栈桥末端与风电塔基座的相对稳定。
3 控制系统
风电塔登乘系统通过数字信号处理器实时采集液压油缸中位置传感器的信息和运动参考单元输出的姿态信息,并通过补偿计算得到液压油缸的目标位置,将其输出给液压阀控制油缸的行程。数字信号处理器采用TI公司的高性能浮点处理器TMS320C6713,主频达 300MHz,浮点运算速度达1200MFLOPS,保证了栈桥补偿运算的速度和精度,满足实时控制的需求。运动参考单元采用 MEMS传感器,横摇及纵摇精度≤0.2°,升沉10cm或量程的10%,支持最大15s的升沉周期,并可根据波浪周期自动调整。其质量仅为45g,防护等级达到 IP68,可较好地适应船用设备所处的湿热、盐雾和霉菌等恶劣环境。控制系统组成框图见图4。
实时控制器利用前述的运动学模型计算出保持栈桥末端稳定所需的油缸行程,组成带前馈和非线性补偿的串级控制系统,以减小轨迹跟踪误差[4-5]。系统工作时有手动和主动稳定2种模式,不同模式有不同的控制逻辑。系统上电时处于空闲模式,给液压系统上电,并充满蓄能器。按下手动控制按钮,手动模式运行指示灯常亮,在手动模式下可通过控制3个油缸对应的增大和减小按钮对其进行手动调节。按下主动稳定模式按钮,主动补偿模式运行指示灯常亮,栈桥自动打开,运动到平衡位置,随后进行主动补偿,保持栈桥稳定。
在补偿模式下,系统监控所有的状态,包括运动参考单元反馈的姿态信息(用于判断海况)、液压油缸的行程信息及补偿目标值与实际值的误差等,并根据不同的条件给出警告或故障指示。
4 试验验证
在船厂进行码头系泊状态下的试验验证,以测试登乘栈桥的补偿效果(见图5)。由于试验时天气条件较好,通过采用人工造浪(即其他船舶从附近经过)的方式来模拟较恶劣的海况。试验结果见表1,补偿前距离是运维船的船首与风电塔基的相对距离,补偿后距离是登乘梯末端与风电塔基的相对距离,数据均通过系在末端的皮尺测量得到。由此可知,最大距离误差在补偿前为76.5cm,在补偿后为23.2cm,小于成年人平均步长60cm的1/2,可满足运维人员的安全输送需求。
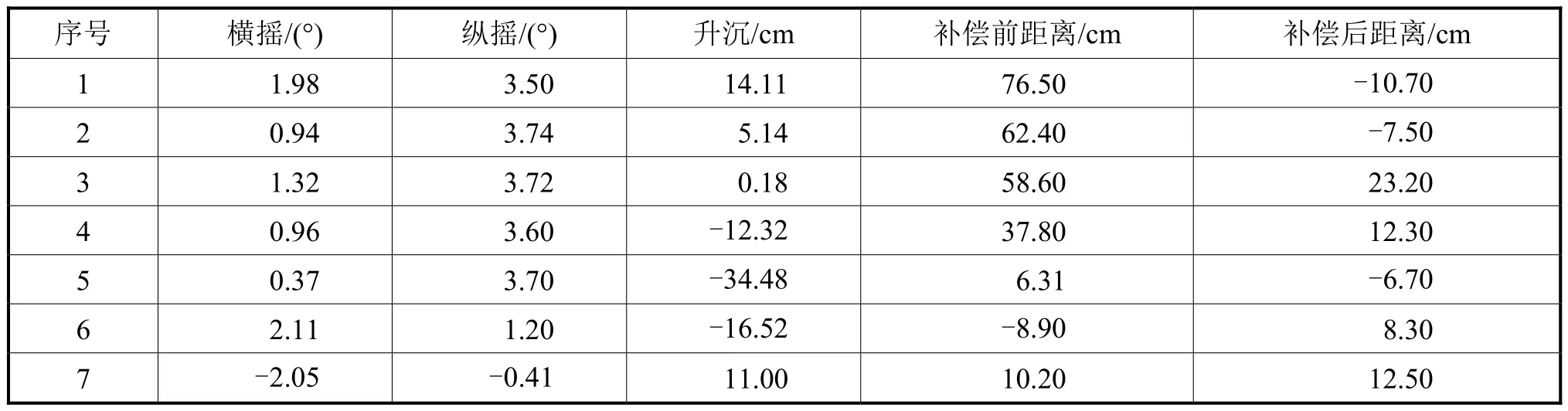
表1 登乘栈桥系泊试验结果
对于补偿后误差,经过分析发现是由以下几个方面的原因造成的:
1 ) 运动参考单元安装后,其测量坐标系与栈桥坐标系有一定的偏差,由于成本原因,该项目选用的运动参考单元升沉精度较差,只有10cm;
2 ) 栈桥设计尺寸较大,不可避免地存在形变;
3 ) 液压控制系统虽然选用了响应较快的伺服比例阀,但其在动作时仍存在一定的延时。
5 结 语
本文研发的登乘栈桥系统已完成码头系泊试验,下一步将进行海试。该新型栈桥登靠系统通过数字信号处理器实现控制,利用液压系统对船舶运行进行主动补偿, 可降低登乘过程中登乘梯与风电塔的相对运动,提高转移风电塔运维人员的安全性,对保证风电场正常运作有重要作用,具有广泛的工程应用前景。
[1] 国家能源局.国家能源局关于海上风电项目进展有关情况的通报:国能新能(2015)343号[Z].
[2] 白玉,胡永攀.海上并靠补给波浪补偿技术发展趋势[J].船舶与海洋工程,2016, 32 (5): 1-4.
[3] 卢道华,高文超,王佳,等.主动波浪补偿平台及其试验系统的设计与仿真[J].船舶工程,2015, 37 (11): 41-43.
[4] 魏素芬,杨文林,张竺英,等.液压绞车主动升沉补偿控制研究[J].液压与气动,2009 (7): 27-29.
[5] DO K D, PAN J.Nonlinear control of an active heave compensation system[J].Ocean Engineering,2005, 35 (5): 558-571.
An Active Wave Compensation Method for the Gangway of Wind Turbine Maintenance Vessel
SU Chang-qing,ZHENG Wen-bin,ZENG You-bing,DING De-fu
(Jiujiang Institute of Precision Measurement and Testing Technology, Jiujiang 332000, China)
This paper introduces a gangway designed with active compensation to meet the requirement of wind turbine maintenance in high seas.The structural design of the gangway is analyzed, and then the computational analysis of the compensation model is carried out.High speed digital signal processor is used as the core of the compensation control system which measures the real-time attitude and heave motions of the maintenance vessel with the motion reference unit, calculates the required stroke of the hydraulic cylinder according to the compensation model, and controls the hydraulic system to realize roll, pitch and heave compensation.It is in this way to maintain the relative distance between the end of the gangway and the base of the wind turbine, and to ensure the safe embarkation of the wind turbine maintainers.Mooring experiment of the maintenance vessel at the quay shows that the system can effectively compensate for the wave influence on the vessel, which well satisfies the embarkation requirement in high seas.
accessing gangway; accessing gangway system; active wave compensation; motion reference unit
U448.18
A
2095-4069 (2017) 04-0022-04
10.14056/j.cnki.naoe.2017.04.005
2017-04-11
苏长青,男,工程师,1985年生。2006年毕业于西北工业大学,现主要从事惯性技术及海洋工程装备的研究工作。