一类非线性系统神经网络鲁棒控制方法
2017-09-12涂庆伟

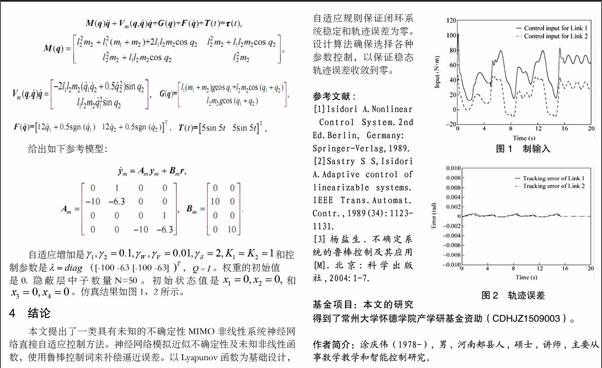
摘 要:基于Lyapunov稳定性理论,采用神经网络直接自适应控制的思想设计控制器,针对一类具有Brunovsky canonical form的非线性系统,提出了一种基于神经网络的鲁棒控制方法,计算机数值模拟进一步验证了所提出方法的有效性。
关键词:非线性系统;自适应控制;神经网络;Lyapunov稳定性
DOI:10.16640/j.cnki.37-1222/t.2017.18.263
1 引言
許多工业系统因其固有的不确定性和非线性特性,难以建立确切的数学模型,使传统控制理论在应用于实践时遇到了前所未有的困难.另一方面,由于各种干扰的存在,系统的结构乃至参数都可能发生变化,因此即使依靠过程先验信息离线辨识得到了系统的模型,也难免存在模型失配的问题。近年来发展起来的神经网络技术为解决复杂非线性系统的控制开辟了一条新路。本文针对一类非线性不确定系统,提出了一种新的基于神经网络补偿的自适应鲁棒控制方案。通过系统的已知动态特性设计一个稳定的反馈控制器,利用神经网络逼近非线性因素,从而消除系统不确定性的影响。权重自适应修正规则是基于Lyapunov理论实现,从而能够保证系统的稳定性。
2 不确定非线性系统神经网络控制方案
4 结论
本文提出了一类具有未知的不确定性MIMO非线性系统神经网络直接自适应控制方法。神经网络模拟近似不确定性及未知非线性函数,使用鲁棒控制词来补偿逼近误差。以Lyapunov函数为基础设计,自适应规则保证闭环系统稳定和轨迹误差为零。设计算法确保选择各种参数控制,以保证稳态轨迹误差收敛到零。
参考文献:
[1]Isidori A.Nonlinear Control System.2nd Ed.Berlin, Germany:Springer-Verlag,1989.
[2]Sastry S S,Isidori A.Adaptive control of linearizable systems.IEEE Trans.Automat. Contr.,1989(34):1123-1131.
[3]杨盐生.不确定系统的鲁棒控制及其应用[M].北京:科学出版社,2004:1-7.
基金项目:本文的研究得到了常州大学怀德学院产学研基金资助(CDHJZ1509003)。
作者简介:涂庆伟(1978-),男,河南郏县人,硕士,讲师,主要从事数学教学和智能控制研究。endprint
